一种用于机器人的自动充电装置及方法与流程
本发明涉及机器人充电,具体的说是一种用于机器人的自动充电装置及方法。
背景技术:
1、在现代社会中,机器人广泛应用于各个领域,如家庭、工业和医疗等。然而,机器人能源管理一直是一个挑战。为了保持机器人的连续工作能力,充电成为一项关键任务。然而,传统的充电方式需要人工干预,不便捷且效率低下。因此,需要一种自动化的机器人充电装置,以提供方便、高效的充电方式。
技术实现思路
1、本发明针对目前技术发展的需求和不足之处,提供一种用于机器人的自动充电装置及方法,完成机器人的自主充电。
2、第一方面,本发明提供一种用于机器人的自动充电装置,解决上述技术问题采用的技术方案如下:
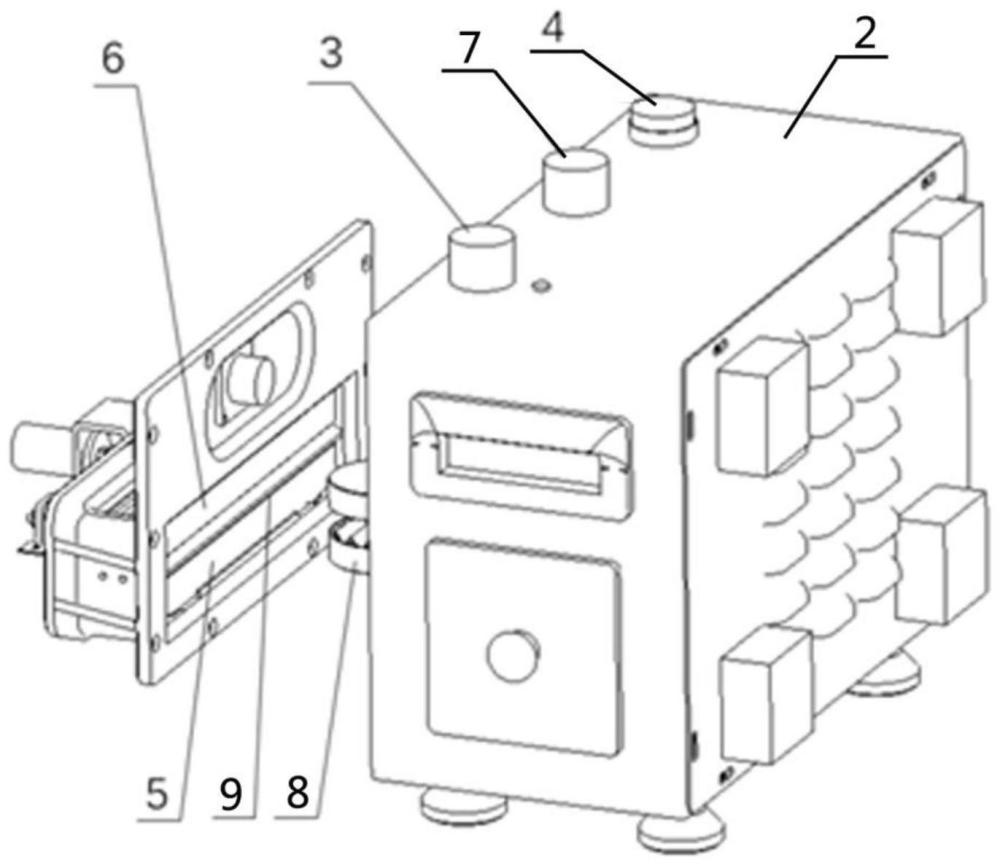
3、一种用于机器人的自动充电装置,该装置包括充电桩、机器人充电接头、充电管理系统、导航和定位系统,其中:
4、充电桩静置在地面,充电桩内置定位模块,充电桩一端通过电缆连接外部电源,另一端通过对接机器人充电接头对机器人电池进行充电;
5、充电管理系统内置于机器人,用于监测机器人电池的电量,并在机器人电池的电量低于设定阈值时向导航和定位系统发送信号,在机器人电池的电量充满时向机器人控制系统发送信号,以驱动机器人离开充电桩;
6、导航和定位系统内置于机器人,用于根据接收到的信号查找距离其所属机器人最近且处于空闲状态的充电桩,随后将其所属机器人导航到距离最近的空闲充电桩,实现充电桩对机器人电池的充电。
7、可选的,所涉及充电桩具有与机器人充电接头相匹配的充电插槽;
8、机器人充电接头固定于机器人外侧;
9、在机器人内置的导航和定位系统根据接收到的信号查找距离其所属机器人最近的且处于空闲状态的充电桩,并将其所属机器人导航并碰触到距离最近的空闲充电桩时,机器人充电接头恰好插入该空闲充电桩的充电插槽。
10、进一步可选的,所涉及充电插槽内设置有插槽正极电极片和插槽负极电极片;
11、机器人充电接头包括接头连杆、设置于接头连杆前侧的接头正极电极片和接头负极电极片、设置于接头连杆后侧的充电检测开关;
12、在机器人充电接头插入充电插槽的过程中,接头连杆前侧的接头正极电极片和接头负极电极片开始接触充电插槽内的插槽正极电极片和插槽负极电极片,同时,连杆向后移动按压充电检测开关,机器人控制系统接收到充电检测开关的信号后,控制机器人停止移动、并开始充电。
13、进一步可选的,所涉及机器人充电接头上设置有上充电挡板和下充电挡板;
14、将机器人导航并碰触到距离最近且处于空闲状态的充电桩时,充电插槽推开上充电挡板和下充电挡板后配合插入机器人充电接头。
15、进一步可选的,所涉及导航和定位系统包括内置于机器人的gps导航系统,外置于机器人的激光雷达和摄像头;
16、机器人通过gps导航系统查找距离其位置最近且处于空闲状态的充电桩,并通过gps导航系统规划其到达最近空闲充电桩的线路;
17、机器人沿着gps导航系统规划的线路到达最近的空闲充电桩后,通过激光雷达确定该充电桩的具体位置,同时通过摄像头调整机器人的线路,使机器人充电接头恰好插入该充电桩的充电插槽。
18、进一步可选的,所涉及充电桩上设置有电源开关按钮、使用/空闲状态指示灯和充电状态指示灯;
19、通过按压电源开关按钮,实现充电桩与外部电源的连接;
20、通过获取使用/空闲状态指示灯的状态,机器人的导航和定位系统根据接收到的信号查找距离其所属机器人最近的、处于空闲状态的充电桩;
21、通过充电状态指示灯,观察与充电桩相对接机器人的充电状态,充电状态包括充电中、充电完成。
22、可选的,所涉及自动充电装置还包括充电保护系统;
23、充电保护系统置于机器人,用于监测机器人电池在充电过程中的电池温度和充电电流,并在监测数据超过设定阈值时向机器人控制系统发送信号,以驱动机器人离开充电桩。
24、第二方面,本发明提供一种用于机器人的自动充电方法,解决上述技术问题采用的技术方案如下:
25、一种用于机器人的自动充电方法,该方法基于第一方面的自动充电装置,自动充电装置的充电桩上设置有电源开关按钮、使用/空闲状态指示灯和充电状态指示灯,该方法的具体充电流程如下:
26、(1)机器人通过内置的充电管理系统监测机器人电池的电量,充电管理系统监测到机器人电池的电量低于设定阈值时向导航和定位系统发送信号;
27、(2)导航和定位系统接收充电管理系统发送的信号,首先根据充电桩的定位模块和启闭状态查找距离其所属机器人最近的充电桩,随后根据充电桩的使用/空闲状态查找处于空闲状态的充电桩,最后将其所属机器人导航到距离最近且处于空闲状态的充电桩,实现机器人充电接头与充电桩的对接;
28、(3)充电状态指示灯指示充电中和充电完成两种状态;机器人充电接头与充电桩完全对接后,通过充电桩的充电状态指示灯获取机器人的充电状态,在充电管理系统监测到机器人完成充电时,向机器人控制系统发送信号,以驱动机器人离开充电桩,继续执行任务。
29、可选的,所涉及充电桩具有与机器人充电接头相匹配的充电插槽,充电插槽内设置有插槽正极电极片和插槽负极电极片;
30、机器人充电接头固定于机器人外侧,包括接头连杆、设置于接头连杆前侧的接头正极电极片和接头负极电极片、设置于接头连杆后侧的充电检测开关;
31、在机器人充电接头插入充电插槽的过程中,接头连杆前侧的接头正极电极片和接头负极电极片开始接触充电插槽内的插槽正极电极片和插槽负极电极片,同时,连杆向后移动按压充电检测开关,机器人控制系统接收到充电检测开关的信号后,控制机器人停止移动、并开始充电。
32、进一步可选的,所涉及导航和定位系统包括内置于机器人的gps导航系统,外置于机器人的激光雷达和摄像头;
33、机器人获取充电桩的启闭状态、充电桩的使用/空闲状态后,通过gps导航系统查找距离其位置最近且处于空闲状态的充电桩,并通过gps导航系统规划其到达最近空闲充电桩的线路;
34、机器人沿着gps导航系统规划的线路到达最近的空闲充电桩后,通过激光雷达确定该充电桩的具体位置,同时通过摄像头调整机器人的线路,使机器人充电接头恰好插入该充电桩的充电插槽。
35、本发明的一种用于机器人的自动充电装置及方法,与现有技术相比具有的有益效果是:
36、(1)本发明通过充电管理系统可以实时监测机器人电池电量,通过导航和定位系统可以查找距离机器人最近且处于空闲状态的充电桩,通过机器人充电接头与充电桩的对接可以实现机器人的自动充电,整个过程无需人工干预,机器人充电完成后还能继续投入因电量低被中断的任务中或者启动新任务;
37、(2)本发明的充电管理系统能够监测电池的充电状态和充电需求,确保充电的及时性和准确性,充电保护系统能够监测充电过程中的电池温度、充电电流等参数,确保充电的安全性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!