振动的控制方法、装置、电子设备及存储介质与流程
本申请涉及振动波形处理,尤其涉及一种振动的控制方法、装置、电子设备及存储介质。
背景技术:
1、非线性问题是日常生活中常见的问题,非线性是指两个变量之间的数学关系不是直线,而是曲线、曲面、或不确定的属性。能够造成非线性问题的因素有很多,例如环境变化、材料误差等。目前,电子设备(例如手机、智能手表)中用于触觉反馈的振动系统含有相关的非线性成分,例如在激励电子设备的振动系统时产生的异于激励频率的振动,该振动对应的振动波形可能会引起内共振或振动通向混淆运动等非线性问题。
2、为了解决非线性问题,通常采取对能够引起非线性问题的振动波形进行非线性补偿的方法,但目前的非线性补偿方法的补偿效果还不够理想,使得电子设备中振动系统的非线性问题仍难以得到改善。
技术实现思路
1、有鉴于此,本申请提供一种振动的控制方法、装置、电子设备及存储介质。
2、一方面,本申请实施例提供一种振动的控制方法,包括:
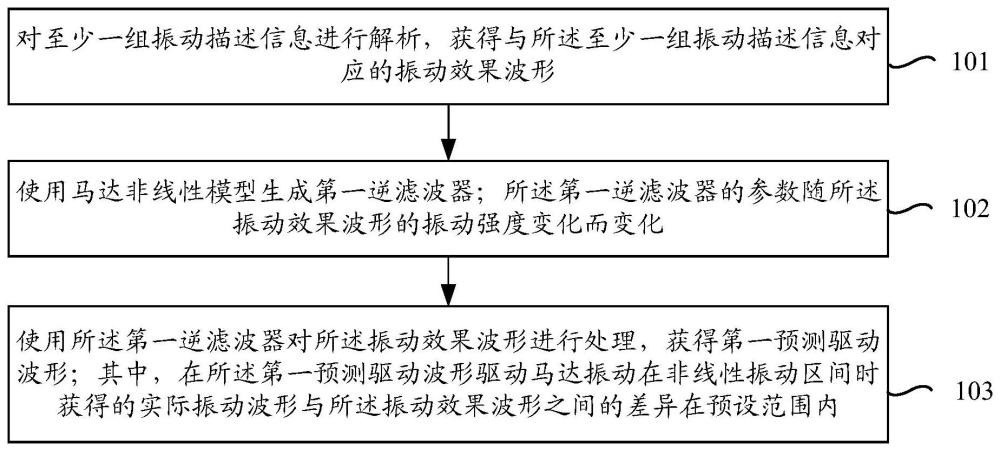
3、对至少一组振动描述信息进行解析,获得与所述至少一组振动描述信息对应的振动效果波形;
4、使用马达非线性模型生成第一逆滤波器;所述第一逆滤波器的参数随所述振动效果波形的振动强度变化而变化;
5、使用所述第一逆滤波器对所述振动效果波形进行处理,获得第一预测驱动波形;其中,在所述第一预测驱动波形驱动马达振动在非线性振动区间时获得的实际振动波形与所述振动效果波形之间的差异在预设范围内。
6、在上述方案中,
7、所述使用马达非线性模型生成随所述振动效果波形的振动强度变化的第一逆滤波器,包括:
8、确定所述振动效果波形的振动强度与所述马达非线性模型中的各非线性参数之间的映射关系;
9、将所述映射关系带入所述马达非线性模型,生成所述第一逆滤波器。
10、在上述方案中,
11、所述方法还包括:
12、将所述马达非线性模型进行线性化处理,获得马达线性模型;
13、使用所述马达线性模型生成第二逆滤波器;所述第二逆滤波器的参数是固定的;
14、使用所述第二逆滤波器对所述振动效果波形进行处理,获得第二预测驱动波形;
15、根据所述振动效果波形和预设补偿映射关系获得驱动补偿参数;
16、根据所述驱动补偿参数对所述第二预测驱动波形进行补偿,生成补偿后的驱动波形;
17、其中,在所述补偿后的驱动波形所述马达振动在非线性振动区间时获得的实际振动波形与所述振动效果波形之间的差异在所述预设范围内。
18、在上述方案中,
19、所述根据所述振动效果波形和预设补偿映射关系获得驱动补偿参数,包括:
20、获得所述振动效果波形包含的振动强度序列;
21、根据所述预设补偿映射关系获得所述振动强度序列中每一个振动强度对应的补偿驱动参数;
22、其中,在所述预设补偿映射关系包括第一子映射关系时,所述补偿驱动参数包括驱动补偿幅值,或所述补偿驱动参数包括驱动补偿幅值和驱动补偿频率;在所述预设补偿映射关系包括第二子映射关系时,所述补偿驱动参数包括驱动补偿系数。
23、在上述方案中,所述根据所述驱动补偿参数对所述第二预测驱动波形进行补偿,生成补偿后的驱动波形,包括:
24、根据每一个振动强度对应的驱动补偿幅值生成第一补偿驱动波形;且将所述第一补偿驱动波形与所述第二预测驱动波形进行叠加处理,获得所述补偿后的驱动波形;
25、或者,根据每一个振动强度对应的驱动补偿幅值及驱动补偿频率生成第二补偿驱动波形;且将所述第二补偿驱动波形与所述第二预测驱动波形进行叠加处理,获得所述补偿后的驱动波形;
26、或者,将每一个振动强度对应的驱动补偿系数乘以所述第二预测驱动波形对应的预测驱动幅值,获得所述补偿后的驱动波形。
27、在上述方案中,所述将所述马达非线性模型进行线性化处理,获得马达线性模型,包括:
28、将所述马达非线性模型中的各非线性参数进行处理,获得各具有固定值的参数;
29、将所述各具有固定值的参数带入到所述马达非线性模型,获得所述马达线性模型。
30、在上述方案中,所述振动强度包括以下之一:位移、速度、加速度;所述第二预测驱动波形包括电压波形或电流波形。
31、另一方面,本申请实施例还提供一种振动的控制装置,包括:
32、获得模块,用于对至少一组振动描述信息进行解析,获得与所述至少一组振动描述信息对应的振动效果波形;
33、生成模块,用于使用马达非线性模型生成第一逆滤波器;所述第一逆滤波器的参数随所述振动效果波形的振动强度变化而变化;
34、处理模块,用于使用所述第一逆滤波器对所述振动效果波形进行处理,获得第一预测驱动波形;其中,在所述第一预测驱动波形驱动马达振动在非线性振动区间时获得的实际振动波形与所述振动效果波形之间的差异在预设范围内。
35、再一方面,本申请实施例还提供一种电子设备,所述电子设备包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,所述处理器用于运行所述计算机程序时,执行上述方法的步骤。
36、又一方面,本申请实施例还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
37、本申请实施例提供一种振动的控制方法、装置、电子设备及存储介质。其中,所述振动波的控制方法包括:对至少一组振动描述信息进行解析,获得与所述至少一组振动描述信息对应的振动效果波形;使用马达非线性模型生成第一逆滤波器;所述第一逆滤波器的参数随所述振动效果波形的振动强度变化而变化;使用所述第一逆滤波器对所述振动效果波形进行处理,获得第一预测驱动波形;其中,在所述第一预测驱动波形驱动马达振动在非线性振动区间时获得的实际振动波形与所述振动效果波形之间的差异在预设范围内。本申请实施例充分考虑了振动系统的非线性,使用马达非线性模型生成随振动效果波形的振动强度变化而变化的第一逆滤波器对振动效果波形进行逆处理,生成补偿后的第一预测驱动波形,使得基于该第一预测驱动波形对至少一组振动描述信息进行解析,获得与所述至少一组振动描述信息对应的振动效果波形;
38、使用马达非线性模型生成第一逆滤波器;所述第一逆滤波器的参数随所述振动效果波形的振动强度变化而变化;
39、使用所述第一逆滤波器对所述振动效果波形进行处理,获得第一预测驱动波形;其中,在所述第一预测驱动波形驱动马达振动在非线性振动区间时获得的实际振动波形与所述振动效果波形之间的差异在预设范围内。以此,提高非线性补偿的补偿效果,从而能够有效改善电子设备中振动系统的非线性问题。
技术特征:
1.一种振动的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述使用马达非线性模型生成随所述振动效果波形的振动强度变化的第一逆滤波器,包括:
3.根据权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述振动效果波形和预设补偿映射关系获得驱动补偿参数,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述驱动补偿参数对所述第二预测驱动波形进行补偿,生成补偿后的驱动波形,包括:
6.根据权利要求3所述的方法,其特征在于,所述将所述马达非线性模型进行线性化处理,获得马达线性模型,包括:
7.根据权利要求4所述的方法,其特征在于,所述振动强度包括以下之一:位移、速度、加速度;所述第二预测驱动波形包括电压波形或电流波形。
8.一种振动的控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,所述处理器用于运行所述计算机程序时,执行权利要求1至7任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7任一项所述方法的步骤。
技术总结
本申请实施例提供一种振动的控制方法、装置、电子设备及存储介质。其中,振动的控制方法包括:对至少一组振动描述信息进行解析,获得与所述至少一组振动描述信息对应的振动效果波形;使用马达非线性模型生成第一逆滤波器;所述第一逆滤波器的参数随所述振动效果波形的振动强度变化而变化;使用所述第一逆滤波器对所述振动效果波形进行处理,获得第一预测驱动波形;其中,在所述第一预测驱动波形驱动马达振动在非线性振动区间时获得的实际振动波形与所述振动效果波形之间的差异在预设范围内。
技术研发人员:柳慧芬,周国强,何亮,沈古月
受保护的技术使用者:武汉市聚芯微电子有限责任公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!