一种不引入频率微分项的风电机组虚拟惯性控制方法与流程
本发明涉及新能源并网和电力系统稳定性控制领域,更具体地说,它涉及一种不引入频率微分项的风电机组虚拟惯性控制方法。
背景技术:
1、近些年来,风力发电发展迅速,其装机容量在电网中的占比越来越高;与传统发电机组不同,风电机组通过变流器并网,不能向电网提供惯性支撑,随着风电机组的装机容量的增加,电网“双高”特征明显,系统等效惯性持续下降,呈现出弱电网特征,较小的扰动可能会导致较大的频率变化率,甚至导致常规机组跳闸、低频减载,给电力系统的频率稳定控制带来严峻挑战;为此,一些研究提出了利用风电机组转子动能提供虚拟惯性支撑控制方法,其控制原理是在功率控制环节引入频率微分项(df/dt),让风机输出的功率响应频率变化率,进而模拟同步发电机的惯性响应。但这种控制方法因其引入了频率的微分项,会引入频率的噪声扰动,如果参数设置不合理,会导致风电机组输出的功率和频率振荡,因此研究不引入频率微分项的风电机组虚拟惯性控制具有重要的工程意义。
技术实现思路
1、本发明的目的在于提供一种不引入频率微分项的风电机组虚拟惯性控制方法,以解决上述背景技术中存在的问题。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
3、第一方面,本技术实施例提供了一种不引入频率微分项的风电机组虚拟惯性控制方法,包括以下步骤:
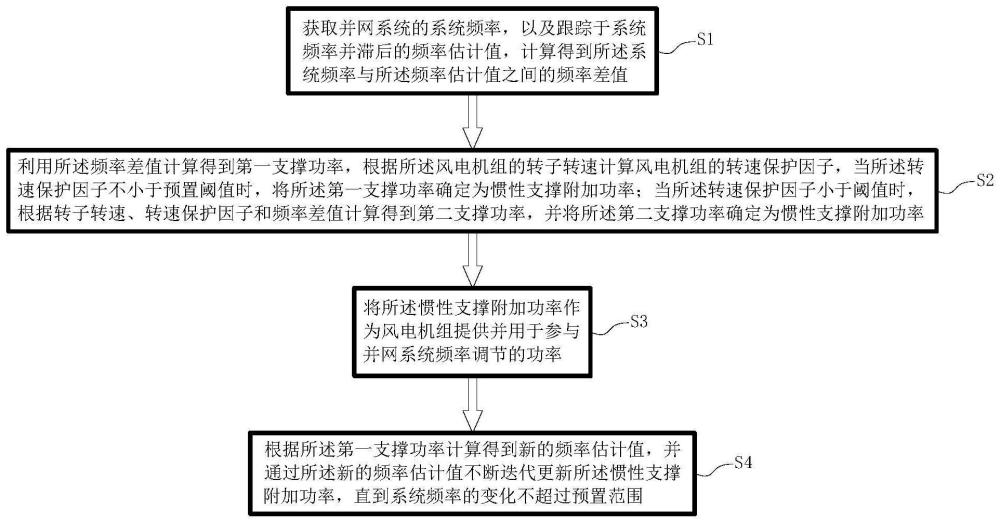
4、获取并网系统的系统频率,以及跟踪于系统频率并滞后的频率估计值,计算得到系统频率与频率估计值之间的频率差值;
5、利用频率差值计算得到第一支撑功率,根据风电机组的转子转速计算风电机组的转速保护因子,当转速保护因子不小于预置阈值时,将第一支撑功率确定为惯性支撑附加功率;当转速保护因子小于阈值时,根据转子转速、转速保护因子和频率差值计算得到第二支撑功率,并将第二支撑功率确定为惯性支撑附加功率;
6、将惯性支撑附加功率作为风电机组提供并用于参与并网系统频率调节的功率;
7、根据第一支撑功率计算得到新的频率估计值,并通过新的频率估计值不断迭代更新惯性支撑附加功率,直到系统频率的变化不超过预置范围。
8、本发明的有益效果是:本方案中,控制原理在于:当并网系统未受到扰动时,风电机组正常运行,频率估计值跟踪电网的频率,即频率估计值等于锁相环测量的系统频率,且惯性支撑附加功率为零;当系统受到扰动时,频率产生偏差,由于控制的滞后性,频率估计值滞后于锁相环测量的电网频率,此时二者的频率差值不为零,频率差值通过惯性功率计算环节即可得到所需的惯性支撑附加功率,进而通过调整风电机组输出,并向并网系统提供虚拟惯性支撑以参与频率调节;计算得到的第一支撑功率通过频率估计环节可得到新的频率估计值并以此迭代循环,当电网进入新的准稳态时,频率估计值通过数次迭代将再次等于锁相环测得的电网频率,惯性支撑附加功率为零,风电机组的虚拟惯性支撑结束。
9、本方案中,通过增加惯性功率计算环节、频率估计环节的虚拟惯性控制,即分别计算惯性支撑附加功率、新的频率估计值的计算控制环节,能够在扰动下模拟同步发电机的惯性响应,向系统提供用于惯性支撑的惯性支撑附加功率,阻碍频率的快速跌落,且该方法由于并未引入频率的微分项,因此不会在风电机组的功率控制环节中引入频率的噪声,避免了传统虚拟惯性控制引入频率微分项后导致风电机组功率和交流频率振荡的风险,改善了频率的动态特性,提高了系统运行的稳定性,对高比例风电接入的电力系统具有重要意义。
10、本方案中,为避免低风速下过度利用转子动能提供虚拟惯性而导致风电机组低速脱网,因此引入转速保护环节,可以根据风电机组的转子转速评估剩余的可利用的转子动能,当可利用的转子动能低于设定值时,对惯性功率环节计算出的第一支撑功率进行限制。
11、在上述技术方案的基础上,本发明还可以做如下改进。
12、进一步,上述第一支撑功率的目标函数通过第一公式表示,第一公式为:
13、
14、式中,fpll表示系统频率,fvir表示滞后于系统频率的频率估计值或新的频率估计值,ω0表示并网系统的额定角频率,dvir表示并网系统的虚拟阻尼系数,xvir表示并网系统的虚拟阻抗,δpvir表示第一支撑功率。
15、进一步,上述转速保护因子的目标函数通过第二公式表示,第二公式为:
16、其中,0≤λ≤1;
17、式中,λ表示转速保护因子,ω表示风电机组当前的转子转速,ωmin表示风电机组运行时允许提供虚拟惯性的最小转子转速,ω1表示进行转子转速保护的临界转速。
18、进一步,上述第二支撑功率的目标函数通过第三公式表示,第三公式为:
19、
20、式中,fpll表示系统频率,fvir表示滞后于系统频率的频率估计值或新的频率估计值,ω0表示并网系统的额定角频率,dvir表示并网系统的虚拟阻尼系数,xvir表示并网系统的虚拟阻抗,δpvir表示第一支撑功率,δp′vir表示第二支撑功率,λ表示转速保护因子,ω表示风电机组当前的转子转速,ωmin表示风电机组运行时允许提供虚拟惯性的最小转子转速,ω1表示进行转子转速保护的临界转速。
21、进一步,上述新的频率估计值的目标函数通过第四公式表示,第四公式为:
22、
23、式中,fvir表示新的频率估计值,hvir表示风电机组的虚拟惯性时间常数,δpvir表示第一支撑功率。
24、进一步,上述并网系统的系统频率通过并网系统的锁相环测得。
25、第二方面,本技术实施例提供了一种不引入频率微分项的风电机组虚拟惯性控制系统,应用于第一方面中任一项的一种不引入频率微分项的风电机组虚拟惯性控制方法,包括:
26、频率差值计算模块,用于获取并网系统的系统频率,以及跟踪于系统频率并滞后的频率估计值,计算得到系统频率与频率估计值之间的频率差值;
27、支撑功率计算模块,用于利用频率差值计算得到第一支撑功率,根据风电机组的转子转速计算风电机组的转速保护因子,当转速保护因子不小于预置阈值时,将第一支撑功率确定为惯性支撑附加功率;当转速保护因子小于阈值时,根据转子转速、转速保护因子和频率差值计算得到第二支撑功率,并将第二支撑功率确定为惯性支撑附加功率;
28、风电机组判断模块,用于将惯性支撑附加功率作为风电机组提供并用于参与并网系统频率调节的功率;
29、功率迭代更新模块,用于根据第一支撑功率计算得到新的频率估计值,并通过新的频率估计值不断迭代更新惯性支撑附加功率,直到系统频率的变化不超过预置范围。
30、进一步,上述在风电机组判断模块中,第二支撑功率的目标函数通过第三公式表示,第三公式为:
31、
32、式中,fpll表示系统频率,fvir表示滞后于系统频率的频率估计值或新的频率估计值,ω0表示并网系统的额定角频率,dvir表示并网系统的虚拟阻尼系数,xvir表示并网系统的虚拟阻抗,δpvir表示第一支撑功率,δp′vir表示第二支撑功率,λ表示转速保护因子,ω表示风电机组当前的转子转速,ωmin表示风电机组运行时允许提供虚拟惯性的最小转子转速,ω1表示进行转子转速保护的临界转速。
33、第三方面,本技术实施例提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现第一方面中任一项的方法。
34、第四方面,本技术实施例提供了一种非暂态计算机可读存储介质,非暂态计算机可读存储介质存储计算机指令,计算机指令使计算机执行第一方面中任一项的方法。
35、与现有技术相比,本发明至少具有以下的有益效果:
36、在本技术中,当并网系统未受到扰动时,风电机组正常运行,频率估计值跟踪电网的频率,即频率估计值等于锁相环测量的系统频率,且惯性支撑附加功率为零;当系统受到扰动时,频率产生偏差,由于控制的滞后性,频率估计值滞后于锁相环测量的电网频率,此时二者的频率差值不为零,频率差值通过惯性功率计算环节即可得到所需的惯性支撑附加功率,进而通过调整风电机组输出,并向并网系统提供虚拟惯性支撑以参与频率调节;计算得到的第一支撑功率通过频率估计环节可得到新的频率估计值并以此迭代循环,当电网进入新的准稳态时,频率估计值通过数次迭代将再次等于锁相环测得的电网频率,惯性支撑附加功率为零,风电机组的虚拟惯性支撑结束。
37、在本技术中,通过增加惯性功率计算环节、频率估计环节的虚拟惯性控制,即分别计算惯性支撑附加功率、新的频率估计值的计算控制环节,能够在扰动下模拟同步发电机的惯性响应,向系统提供用于惯性支撑的惯性支撑附加功率,阻碍频率的快速跌落,且该方法由于并未引入频率的微分项,因此不会在风电机组的功率控制环节中引入频率的噪声,避免了传统虚拟惯性控制引入频率微分项后导致风电机组功率和交流频率振荡的风险,改善了频率的动态特性,提高了系统运行的稳定性,对高比例风电接入的电力系统具有重要意义。
38、在本技术中,为避免低风速下过度利用转子动能提供虚拟惯性而导致风电机组低速脱网,因此引入转速保护环节,可以根据风电机组的转子转速评估剩余的可利用的转子动能,当可利用的转子动能低于设定值时,对惯性功率环节计算出的第一支撑功率进行限制。
- 还没有人留言评论。精彩留言会获得点赞!