基于线性霍尔的轴向磁通电机转子角度检测方法
本发明涉及轴向磁通电机转子角度检测技术,具体公开基于线性霍尔的轴向磁通电机转子角度检测方法,属于发电、变电或配电的。
背景技术:
1、对传统的交流轴向磁通电机进行矢量控制时,需要提供精确的转子角度和旋转速度。常规的转子角度测量方法是与转轴同轴连接一个外置的角度测量装置,外置的角度测量装置通常是光电编码器、旋转变压器或者磁编码器。轴向磁通电机的轴向长度短,具有显著的体积优势。然而上述外置测量装置不可避免地占用了轴向空间,削弱了轴向磁通电机的轴向空间优势。线性霍尔传感器具有体积小、灵敏度高等优点,常常将其安装于云台、油泵电机等紧凑型设备内部,通过检测电机内部永磁体的漏磁场来估算转子位置。
2、授权号为cn 216794766 u的中国专利公开了一种电机外壳及轴向磁通电机,为安装旋转变压器,电机外壳需要包括传感器容纳部、接线盒容纳部和引线部,增加了电机轴向长度。公开号为cn 110892619a的pct国际专利公开一种具有内置光学编码器的轴向磁通电机,永磁体安装在转子的第一轴向面上,并且预定的编码器图案设置在转子的第二轴向面的表面上,定子位于转子的第一轴向面相邻的一侧,传感器安装在转子的第二轴向面相邻的另一侧,传感器输出与转子的第二轴向面的表面上的所述编码器图案相对应的信号,该编码器的尺寸跟随电机尺寸有较大变化,且编码器图案与传感器仍然占用了电机轴向空间。公开号为cn 115664062 a的中国专利公开一种分块拼接式轴向磁通定子结构,在定子铁芯端面开槽布置霍尔传感器,不增加电机的轴向长度。然而铁芯端面为主磁路,磁场强度远大于线性霍尔的线性检测区,因此当电机旋转时,霍尔工作在磁饱和区,输出电压为高低电平,无法提供正比于磁通密度的模拟信号,角度精度有限;此外,在定子端部开槽,对电机的原有结构造成了破坏,改变了电机的主磁路分布,对电机性能产生不良后果。
3、现有的基于线性霍尔传感器的转子位置检测技术涉及的检测对象均为传统的径向磁通电机,尚未有相关研究采用线性霍尔检测轴向磁通电机转子位置。相比较于传统的径向磁通电机,轴向磁通电机对轴向空间要求更为苛刻,外置式的位置传感器不可避免地增加了轴向空间占用和机械连接的复杂性,内置线性霍尔传感器的电机转子角度检测方法为轴向磁通电机的转子角度检测提供了新思路。然而,轴向磁通电机定子槽口检测到的霍尔信号中谐波含量较大,影响角度检测精度,有必要针对性地对信号进行相应的预处理。
技术实现思路
1、本发明的目的是针对上述背景技术的不足,提出基于线性霍尔的轴向磁通电机转子角度检测方法,在轴向磁通电机内部寻找合适的磁敏元件安装位置与安装模式,通过对不同安装模式下磁敏元件输出的信号进行处理获取转子角度信息。该方案具有节省空间、紧凑性好,精度高的优点,解决现有外置式位置传感器因轴向空间占用大、机械连接复杂难以在轴向磁通电机转子角度检测中得以应用的技术问题,实现轴向磁通电机高紧凑性、高精度角度检测的发明目的。
2、本发明为实现上述发明目的采用如下技术方案:
3、本发明提出的基于线性霍尔的轴向磁通电机转子角度检测方法,包括如下步骤:
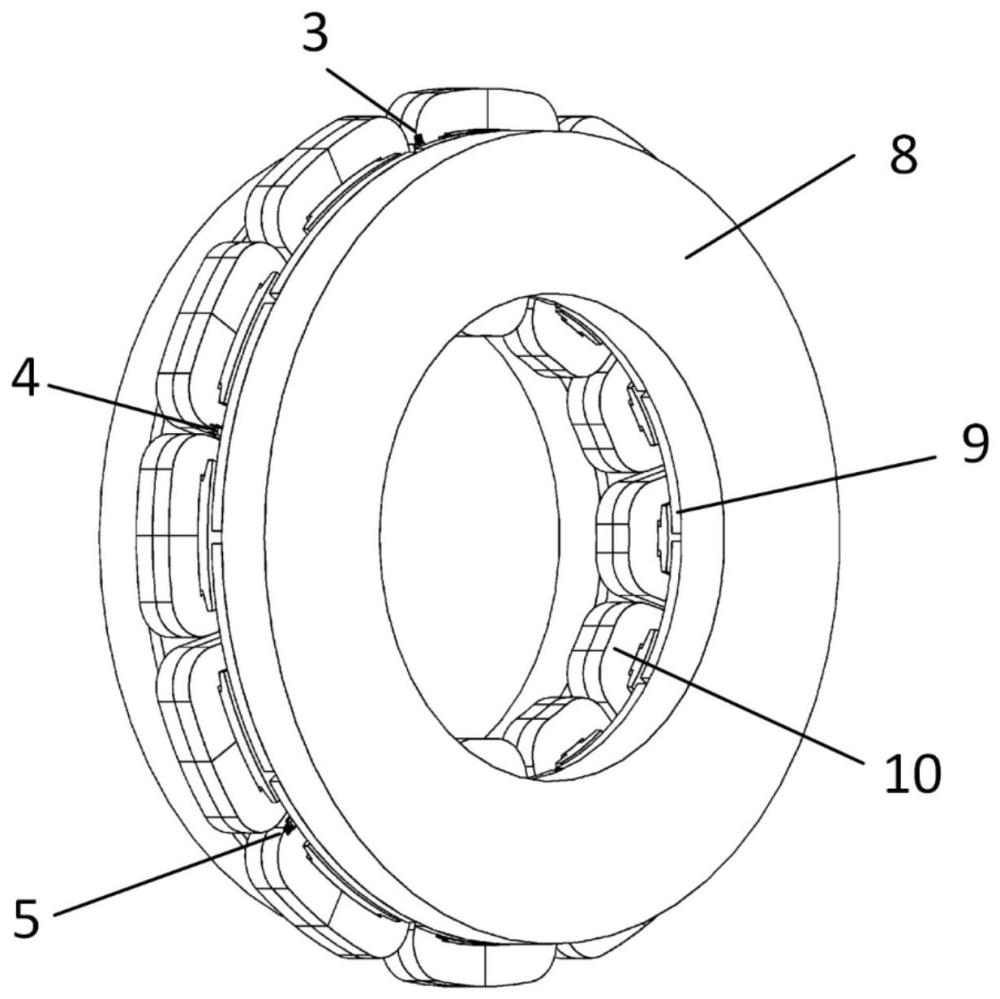
4、步骤1,沿周向在轴向磁通电机定子槽口内等间隔安装至少一组线性霍尔传感器,各霍尔传感器的磁敏感面与永磁转子表面相对;
5、步骤2,对线性霍尔传感器输出的电压信号进行包含模数转换、去直流分量、线性组合、坐标变换的预处理,获取一对正交信号;
6、步骤3,从步骤2获取的一对正交信号中估测相位和转子位置。
7、具体地,根据霍尔元件原始输出信号中的谐波分布情况,有如下两种霍尔元件安装及信号预处理方案。
8、方案一:安装一组线性霍尔元件并对线性霍尔元件的输出信号进行预处理
9、首先,在轴向磁通电机3个定子槽口内等距安装三个线性霍尔元件为一组,三个线性霍尔元件的磁敏感面均与永磁转子表面相对;其中,第一线性霍尔元件安装于定子的一个槽口内,沿统一方向依次相差n个齿距安装第二线性霍尔元件、第三线性霍尔元件。
10、数字信号处理器通过模拟数字转换器采集3个线性霍尔元件的输出信号,分别形成第一电压信号u1、第二电压信号u2和第三电压信号u3。三个电压信号需满足:第一电压信号超前于第二电压信号第三电压信号滞后于第二电压信号对于具有ps个定子槽和pr对极的电机,此时n需要满足:360/ps*pr=60n,其中,n为正整数且n≠3k,k=1,2,3…,即可满足或者当线性霍尔检测点处磁场强度为零时,静态电压信号为uq。
11、将上述三个电压信号进行如下预处理:
12、分别将3个电压信号减去静态电压信号获得第四电压信号u4、第五电压信号u5和第六电压信号u6:
13、
14、当为60°时,由第四电压信号u4与第六电压信号u6作差获得第七电压信号u7;由第六电压信号u6与第五电压信号u5作和获得第八电压信号u8;由第五电压信号u5与第四电压信号u4作和并且取反获得第九电压信号u9:
15、
16、当为120°时,第四电压信号u4与第五电压信号u5作差获得第七电压信号u7,由第五电压信号u5与第六电压信号u6作差获得第八电压信号u8,由第六电压信号u6与第四电压信号u4作差获得第九电压信号u9:
17、
18、第七电压信号u7、第八电压信号u8和第九电压信号u9经clarke变换tclarke可获得一对正交信号其中:
19、
20、上述预处理过程可有效降低正交信号uαβ中的3次谐波含量,但对5、7次谐波无抑制作用。因此,当霍尔元件原始输出信号3次谐波含量高,5、7次谐波含量低时,可选择方案一安装霍尔元件并进行信号预处理,利用预处理后的正交信号uαβ用作相位计算,可有效提升转子位置检测精度。
21、方案二:安装两组线性霍尔元件并对线性霍尔元件的输出信号进行预处理
22、数字信号处理器通过模拟数字转换器采集6个线性霍尔元件的输出信号,分别形成a组第一电压信号ua1、a组第二电压信号ua2、a组第三电压信号ua3、b组第一电压信号ub1、b组第二电压信号ub2和b组第三电压信号ub3。六个电压信号需满足:每一组线性霍尔元件中的第一电压信号均超前于第二电压信号第三电压信号均滞后于第二电压信号其中可以为60°或者120°;a组第一电压信号超前b组第一电压信号θ,其中θ可以为30°或者150°。当线性霍尔检测点处磁场强度为零时,静态电压信号为uq。
23、将上述6个电压信号进行如下预处理。
24、分别将6个电压信号减去静态电压信号获得a组第四电压信号ua4、a组第五电压信号ua5、a组第六电压信号ua6、b组第四电压信号ub4、b组第五电压信号ub5和b组第六电压信号ub6:
25、
26、当为60°时,根据a、b两组线性霍尔的第四电压信号、第五电压信号、第六电压信号以及线性组合和坐标变换矩阵tv可获得一对正交信号其中:
27、θ为30°,
28、
29、θ为150°,
30、
31、当为120°时,根据a、b两组线性霍尔的第四电压信号、第五电压信号、第六电压信号以及线性组合和坐标变换矩阵tv可获得一对正交信号其中:
32、θ为30°,
33、
34、θ为150°,
35、
36、上述预处理过程可有效抑制正交信号uαβ中的3、5、7次谐波。因此,当霍尔元件原始输出信号中3、5、7次谐波含量均较高时,可选择方案二安装霍尔元件并进行信号预处理,利用预处理后的正交信号uαβ用作相位计算,可显著提升转子位置检测精度。
37、本发明采用上述技术方案,具有以下有益效果:
38、(1)本发明提出了一种新颖的轴向磁通电机转子角度检测方案:在定子槽口内安装三个或六个磁敏元件,对磁敏元件输出的信号进行数字计算获取转子位置,实现高紧凑、低成本的电机转子位置检测,相较于现有的轴向磁通电机转子角度检测方案而言,本发明无需额外的高成本硬件电路即可实现完全离轴式的转子位置检测,可靠性高,且具有非常显著的空间优势。
39、(2)本发明针对霍尔元件原始输出信号中的谐波含量,综合考虑成本和性能,提供两种霍尔元件安装和信号预处理方案,内置线性霍尔传感器输出信号预处理算法仅包含加减法与乘法,在不借助滤波器的情况下,可有效去除原始磁密中的3、5、7谐波,提升转子角度检测精度;对于数字信号处理器而言,运算量少,效率高。
40、(3)本发明只需要在定子槽口内安装三个或六个与转子永磁表面相对的线性霍尔元件,无需占用定子轴向空间和复杂的机械连接,也不需要在定子上开槽,安装限制少,满足高性能轴向磁通电机的测角测速需求。
- 还没有人留言评论。精彩留言会获得点赞!