绕线机及其在电机线圈的自动化绕制中的应用和机器人的制作方法
本申请涉及绕线机和机器人电机,尤其涉及绕线机及其在电机线圈的自动化绕制中的应用和机器人。
背景技术:
1、在电机线圈的绕线过程中,有时需要改变线材的方向,相关技术的绕线机难以改变线材方向和/或出线位置。
2、基于此,本申请提供了绕线机及其在电机线圈的自动化绕制中的应用和机器人,以改进相关技术。
技术实现思路
1、本申请的目的在于提供绕线机及其在电机线圈的自动化绕制中的应用和机器人,方便调节线材的方向和/或出线位置。
2、本申请的目的采用以下技术方案实现:
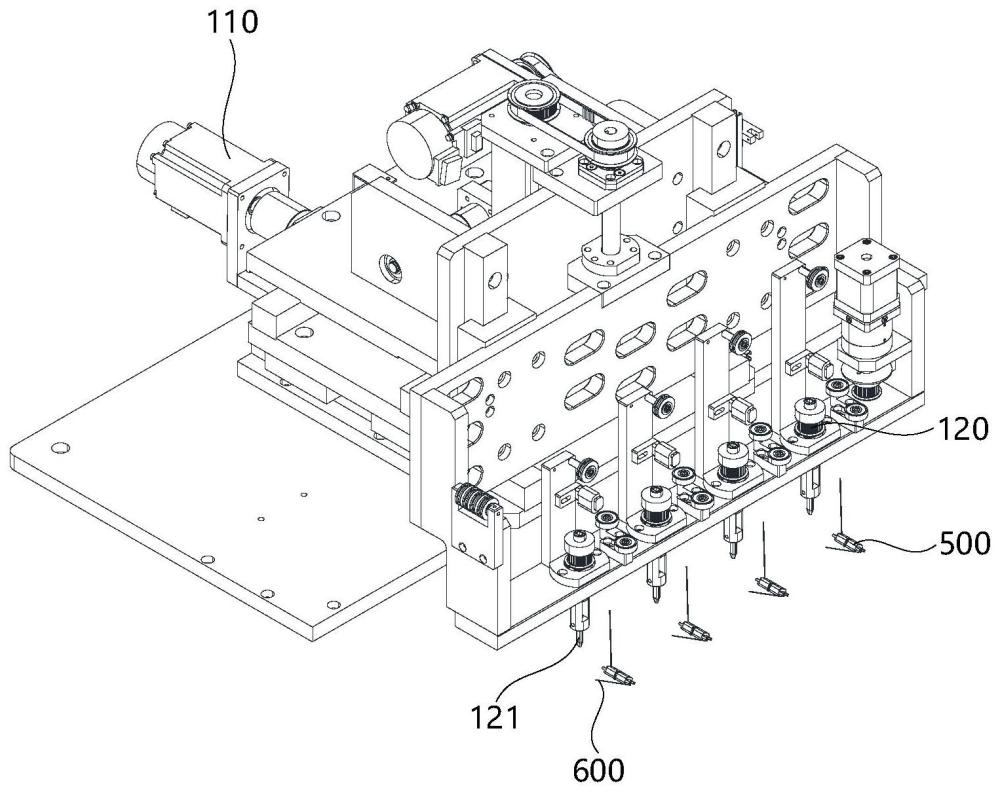
3、第一方面,本申请提供了一种绕线机,所述绕线机包括引线装置,所述引线装置包括:
4、引线平台,所述引线平台的活动端用于进行至少一个自由度的移动和/或转动;
5、出线咀模块,用于设置于所述引线平台的活动端,所述出线咀模块包括至少一个出线咀,每个出线咀设置有允许线材穿过的第一通孔,一个或多个出线咀用于与所述引线平台的活动端发生相对转动和/或相对移动以改变线材的方向和/或出线位置。
6、第二方面,本申请提供了一种上述任一项绕线机在电机线圈的自动化绕制中的应用。
7、第三方面,本申请提供了一种机器人,所述机器人包括至少一个关节电机,一个或多个关节电机的电机线圈采用上述任一项绕线机绕制得到。
8、本申请提供的绕线机及其在电机线圈的自动化绕制中的应用和机器人,引线平台可以在一个或多个方向上进行移动和旋转,以便适应不同的绕线需求。出线咀模块设置在引线平台的活动端上,多个出线咀可以相对于引线平台的活动端进行相对转动和/或相对移动,以改变线材的方向和/或出线位置。该绕线机适用于扁线的自动化绕制,通过相对转动和/或移动出线咀,可以轻松改变线材的截面方向和出线位置。绕线机可以配置多个出线咀,每个出线咀对应一个工位,实现在同一台机器上同时绕制多个线圈,提高了生产效率。
技术特征:
1.一种绕线机,其特征在于,所述绕线机包括引线装置,所述引线装置包括:
2.根据权利要求1所述的绕线机,其特征在于,所述线材为扁线,所述出线咀的第一通孔为矩形通孔,所述绕线机用于进行扁线的自动化绕制。
3.根据权利要求1所述的绕线机,其特征在于,所述引线平台的活动端用于进行三个自由度的移动。
4.根据权利要求1所述的绕线机,其特征在于,一个或多个出线咀用于与所述引线平台的活动端发生相对转动。
5.根据权利要求4所述的绕线机,其特征在于,以发生相对转动的出线咀为可转动出线咀,多个可转动出线咀用于与所述引线平台的活动端发生同步或者各自独立的相对转动。
6.根据权利要求5所述的绕线机,其特征在于,所述出线咀模块还包括第一驱动部件和第一传动部件,所述第一驱动部件用于通过所述第一传动部件带动多个可转动出线咀与所述引线平台的活动端发生同步的相对转动。
7.根据权利要求6所述的绕线机,其特征在于,所述可转动出线咀的数量为n,所述第一传动部件包括n+1个第一同步轮和一个第一同步带,n是大于1的整数;
8.根据权利要求7所述的绕线机,其特征在于,所述出线咀模块还包括与每个可转动出线咀相应的中空的轴套;
9.根据权利要求8所述的绕线机,其特征在于,所述轴套设置有用于观察线材的方向的观察窗。
10.根据权利要求9所述的绕线机,其特征在于,所述观察窗贯穿所述轴套。
11.根据权利要求10所述的绕线机,其特征在于,所述观察窗的形状为矩形。
12.根据权利要求5所述的绕线机,其特征在于,所述出线咀模块还包括与每个可转动出线咀相应的第二驱动部件和第二传动部件,所述第二驱动部件用于通过所述第二传动部件带动相应的可转动出线咀与所述引线平台的活动端发生同步或者各自独立的相对转动。
13.根据权利要求5所述的绕线机,其特征在于,所述出线咀模块还包括与每个可转动出线咀相应的第三驱动部件,所述第三驱动部件用于带动相应的可转动出线咀与所述引线平台的活动端发生同步或者各自独立的相对转动。
14.根据权利要求1所述的绕线机,其特征在于,所述绕线机还包括绕线装置,所述绕线装置包括与每个出线咀相应的转轴部件,一个或多个转轴部件用于从双侧压紧与所述出线咀相应的绕线架。
15.根据权利要求14所述的绕线机,其特征在于,以从双侧压紧绕线架的转轴部件为可调节转轴部件,所述可调节转轴部件包括固定侧转轴和可动侧转轴,多个可调节转轴部件中的可动侧转轴用于进行同步或者各自独立的移动;
16.根据权利要求15所述的绕线机,其特征在于,所述绕线装置还包括第四驱动部件和第三传动部件,所述第四驱动部件用于通过所述第三传动部件带动多个可调节转轴部件中的可动侧转轴进行同步的移动。
17.根据权利要求16所述的绕线机,其特征在于,所述绕线装置还包括固定侧座板、可动侧座板、与每个固定侧转轴相应的固定侧轴承以及与每个可动侧转轴相应的可动侧轴承;
18.根据权利要求15所述的绕线机,其特征在于,所述绕线装置还包括与每个可动侧转轴相应的第五驱动部件和第四传动部件,所述第五驱动部件用于通过所述第四传动部件带动相应的可动侧转轴移动。
19.根据权利要求15所述的绕线机,其特征在于,所述绕线装置还包括与每个可动侧转轴相应的第六驱动部件,所述第六驱动部件用于带动相应的可动侧转轴移动。
20.根据权利要求15所述的绕线机,其特征在于,多个可调节转轴部件中的固定侧转轴和可动侧转轴用于进行同步的转动,所述可调节转轴部件的数量为m,m是大于1的整数;
21.根据权利要求1所述的绕线机,其特征在于,所述绕线机还包括剪线装置,所述剪线装置包括:
22.一种权利要求1-21任一项所述的绕线机在电机线圈的自动化绕制中的应用。
23.根据权利要求22所述的绕线机在电机线圈的自动化绕制中的应用,其特征在于,所述电机为无框电机。
24.根据权利要求22所述的绕线机在电机线圈的自动化绕制中的应用,其特征在于,所述电机线圈采用扁线,所述绕线机用于进行扁线的自动化绕制。
25.一种机器人,其特征在于,所述机器人包括至少一个关节电机,一个或多个关节电机的电机线圈采用权利要求1-21任一项所述的绕线机绕制得到。
技术总结
本申请提供了绕线机及其在电机线圈的自动化绕制中的应用和机器人,所述绕线机包括引线装置,所述引线装置包括:引线平台,所述引线平台的活动端用于进行至少一个自由度的移动和/或转动;出线咀模块,用于设置于所述引线平台的活动端,所述出线咀模块包括至少一个出线咀,每个出线咀设置有允许线材穿过的第一通孔,一个或多个出线咀用于与所述引线平台的活动端发生相对转动和/或相对移动以改变线材的方向和/或出线位置。本申请将出线咀模块设置在引线平台的活动端上,多个出线咀可以相对于引线平台的活动端进行相对转动和/或相对移动,以改变线材的方向和/或出线位置,适用于扁线的自动化绕制,可以轻松改变线材的截面方向和出线位置。
技术研发人员:请求不公布姓名,请求不公布姓名
受保护的技术使用者:上海智元新创技术有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!