一种电机控制方法与流程
本发明涉及电机控制的,尤其涉及一种电机控制方法。
背景技术:
1、无刷直流电机由电动机主体和驱动器组成,是一种机电一体化产品,现有技术可以使用反电动势进行无传感器的无刷直流电机(brushless direct current motor,简称bldc)控制,例如使用六步梯形波(120度换相法)为电机绕组通电,永磁电机转子转动时,定子绕组产生电压,即反电动势,其幅值与电机转速成正比。
2、foc(field-oriented control)为磁场导向控制,又称为矢量控制(vectorcontrol),是一种利用变频器控制三相电机的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制电机的输出。
3、无刷直流电机的弦波foc控制在启动时可以做到无噪声、启动抖动小、启动平稳等优点,但在启动过程中一般施加较大的负载力矩,与电机的初始转速不协调,导致角速度波动小以及电角度只有较小的强拉现象,从而产生启动失败、失步(即电机在运行过程中,没有按照命令走相应的步数,出现丢步现象;也可以理解为同步电动机的转子不能跟随定子的旋转磁场同步旋转,即为失步)、出现堵转而无法启动的问题;另外,对启动的算法精度要求较高,需要添加霍尔传感器识别各种流程中的电机参数和驱动信号,增加传感器的硬件校准成本。因此,现有技术无法解决无刷直流电机低成本低速启动的问题。
技术实现思路
1、本技术公开一种电机控制方法,具体的技术方案如下:
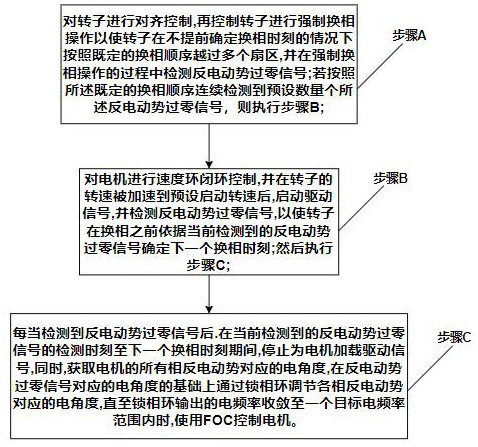
2、一种电机控制方法,所述电机控制方法包括:步骤a、对转子进行对齐控制,再控制转子进行强制换相操作以使转子在不提前确定换相时刻的情况下按照既定的换相顺序越过多个扇区,并在强制换相操作的过程中检测反电动势过零信号;若按照所述既定的换相顺序连续检测到预设数量个所述反电动势过零信号,则执行步骤b;其中,电机内部不安装位置传感器,电机包括转子;所述预设数量是转子旋转一个电气周期的情况下,所允许越过的不同扇区的最大数量与数值1的差值;步骤b、对电机进行速度环闭环控制,并在转子的转速被加速到预设启动转速后,启动驱动信号,并检测反电动势过零信号,以使转子在换相之前依据当前检测到的反电动势过零信号确定下一个换相时刻;然后执行步骤c;步骤c、每当检测到反电动势过零信号后,在当前检测到的反电动势过零信号的检测时刻至下一个换相时刻期间,停止为电机加载驱动信号,同时,获取电机的所有相反电动势对应的电角度,在反电动势过零信号对应的电角度的基础上通过锁相环调节各相反电动势对应的电角度,直至锁相环输出的电频率收敛至一个目标电频率范围内时,使用foc控制电机。
3、与现有技术相比,本技术对电机的转子进行对齐控制,从转子静止开始,转子对齐后,通过连续多次检测到反电动势过零信号的情况下切入速度环闭环控制以提高电机转速,直至检测到反电动势过零信号,停止为驱动电机加载驱动信号,然后在最新检测到的反电动势过零信号对应的电角度的基础上,运用锁相环对转子进行电角度反馈检测,直至锁相环输出的电频率收敛后,切换到使用foc控制电机,实现开启高速foc弦波无感闭环控制,从而不借助位置传感器,而是利用电机本身的特征信号来取得与位置传感器等同的信号参数和角度位置检测效果,节省传感器设计和校准成本;也避免电机在承载较大负载的情况下因为采用弦波低速启动电机(可以是从静止状态启动转子转动)而造成启动失败、失步、出现堵转而无法启动的问题,降低电机启动难度。
4、进一步地,在所述步骤a中,对转子进行对齐控制的方法包括:在转子启动转动之前,设置预知位置,以将转子对齐到预知位置;然后控制电机中的电机绕组通电,驱动转子从静止开始转动,直至转子转动到预知位置,确定完成对转子的对齐控制;其中,转子在预知位置处的磁极与定子的磁场平行;电机包括定子,定子包括多相电机绕组;转子是具有至少一对异性磁极的磁体。从而确定将预知位置设置为转子的对齐位置并从预知位置开始执行强制换相操作,提高后续检测反电动势过零信号的准确度,预防电机启动转动过程中出现失步。
5、进一步地,转子是具有一对异性磁极的磁体;定子包括三相电机绕组,以构成六个具有不同磁场方向的扇区;其中,所述预知位置是与指定方向成30度的位置、或与指定方向成90度的位置、或与指定方向成150度的位置、或与指定方向成210度的位置、或与指定方向成270度的位置、或与指定方向成330度的位置;与指定方向成30度的位置、与指定方向成90度的位置、与指定方向成150度的位置、与指定方向成210度的位置、与指定方向成270度的位置以及与指定方向成330度的位置之间的排列顺序是所述既定的换相顺序;其中,指定方向是电机定子坐标系的一坐标轴方向。转子按照是所述既定的换相顺序转动一圈的过程中,依次越过与指定方向成30度的位置、与指定方向成90度的位置、与指定方向成150度的位置、与指定方向成210度的位置、与指定方向成270度的位置以及与指定方向成330度的位置,并且转子存在至少5次换相的机会。使得转子每转过6个扇区则旋转一圈,形成电机转速。
6、进一步地,在所述步骤a中,控制转子进行强制换相操作以使转子在不提前确定换相时刻的情况下按照既定的换相顺序越过多个扇区,并在强制换相操作的过程中检测反电动势过零信号的方法包括:控制电机的其中两相电机绕组通电,并控制电机的剩余一相电机绕组不通电,则三相电机绕组产生按照既定的换相顺序进行变化的磁场力;其中,所述定子包括三相电机绕组;在所述按照既定的换相顺序进行变化的磁场力的驱动下,转子从所述预知位置开始按照既定的换相顺序转动且按照预设强制频率进行换相;在转子转动的过程中,每检测到一个反电动势过零信号,则计数一次,并记录当前检测到的反电动势过零信号所在位置及其检测时刻,其中,当前检测到的反电动势过零信号所在位置使用所述转子当前所处的电角度表示,使每个反电动势过零信号均存在对应的电角度。本技术使用所述按照既定的换相顺序进行变化的磁场力控制转子按照预设强制频率进行换相的过程中,以开环的方式产生相应的电机转速,沿着既定的换相顺序变化,可以将电机开环加速到一定的转速,可以产生过大的负载力矩,但是没有反馈转速回电机,即不通过反馈量约束电机转速的变化和反电动势的变化,产生足够的反电动势来达到检测过零点的水平,如此争取在一定数量的强制换相周期内检测出多个反电动势过零信号,提高反电动势过零信号的检测能力,后续会通过执行步骤b来调节过大的负载力矩以抑制失步问题。
7、进一步地,在强制换相操作的过程中,检测所述反电动势过零信号的方法包括:对不通电的一相电机绕组的相端口进行采样,获得采样端电压;判断采样端电压是否等于母线电压的一半,是则确定当前检测到反电动势过零信号,否则确定当前没有检测到所述反电动势过零信号;其中,母线电压是用于驱动电机运转的供电电压;每相电机绕组的电阻是相等,每相电机绕组通过相端口连接外部的三相逆变电路。从而在转子转动到不通电相的电机绕组的情况下,通过检测到不通电相的端电压即可检测不通电相产生反电动势过零信号。
8、进一步地,在所述步骤a中,若按照所述既定的换相顺序连续检测到预设数量个所述反电动势过零信号,则确定统计到转子按照既定的换相顺序连续转动过预设数量个扇区,并确定所述预设数量个所述反电动势过零信号按照既定的换相顺序依次产生在对应扇区内。提高后续闭环控制过程中检测反电动势过零信号的准确性,减少转子抖动、转速波动大的影响。
9、进一步地,所述步骤a还包括:若没有检测到按照所述既定的换相顺序产生的预设数量个反电动势过零信号,则降低所述预设强制频率并将降低后的预设强制频率更新为所述预设强制频率,或者增大三相逆变电路的上桥臂中用于导通mos管的占空比以提高电机的输出力矩;然后控制所述转子重新进行强制换相操作,直至按照所述既定的换相顺序连续检测到预设数量个所述反电动势过零信号。从而克服换相周期不稳定和反电动势过零信号丢失的问题。
10、进一步地,在所述步骤b中,所述检测反电动势过零信号的方法包括:对不通电的一相电机绕组的相端口进行采样,获得采样端电压;然后判断采样端电压是否等于母线电压的一半;当判断到采样端电压等于母线电压的一半时,确定当前检测到所述反电动势过零信号,并将当前判断时刻标记为当前检测到的反电动势过零信号的检测时刻,然后基于最新换相时刻与当前检测到的反电动势过零信号的检测时刻,计算下一个换相时刻,进而确定下一个换相点;其中,当前检测到的反电动势过零信号的检测时刻位于目标换相周期的中间时刻;最新换相时刻至下一个换相时刻的时间段是目标换相周期;当判断到采样端电压不等于母线电压的一半时,确定当前没有检测到所述反电动势过零信号,然后通过对电机进行速度环闭环控制来将转子的转速调节为等于预设启动转速,以使采样端电压等于母线电压的一半。
11、基于前述技术方案,本技术将判断到采样端电压等于母线电压的一半的时刻标记为当前检测到反电动势过零信号的检测时刻、或当前检测到反电动势过零点的检测时刻、或当前检测到过零点的检测时刻,作为定子相对于转子没有切割磁感线产生反电动势的时间。由于已经获知最新换相时刻以及当前检测到反电动势过零信号的检测时刻,所以能够推算出所述目标换相周期的一半周期,进而确定下一个换相时刻及其对应电角度,实现自适应地控制转子在相应时间越过反电动势过零点。
12、进一步地,在所述步骤b中,从最新换相时刻至所述当前检测到的反电动势过零信号的检测时刻期间,存在:对电机进行速度环闭环控制,当转子的转速被加速到预设启动转速时,完成方波启动;启动方波之后,调节转子的转速回归到所述预设启动转速;其中,所述驱动信号是方波;对电机进行速度环闭环控制的过程中,电机的其中两相电机绕组通电,电机的剩余一相电机绕组不通电,以控制转子在定子的磁场内转动。使转子的转速足以支持检测所述反电动势过零信号,且不控制转子进行强制换相操作,而是要根据实际的反电动势过零信号存在时刻来进行换相。
13、进一步地,在所述步骤c中,检测到反电动势过零信号后,从所述当前检测到的反电动势过零信号的检测时刻至下一个换相时刻期间,停止给电机的三相电机绕组通电以不输出方波给电机,同时获取电机的三相反电动势及其对应的电角度,但转子受最新换相时刻至所述当前检测到的反电动势过零信号的检测时刻期间积累形成的惯性影响而继续转动;其中,当前检测到的反电动势过零信号所在位置使用所述转子当前所处的电角度表示,使每个反电动势过零信号均存在对应的电角度。从所述当前检测到的反电动势过零信号的检测时刻至下一个换相时刻期间,电机的转子处于自由停转状态,此时是电机的转子上没有施加任何力矩,受到轴承摩擦和感应电动势产生的反向磁通产生的力矩下减速最终到停止的状态,此时由于电机的三相电机绕组都不存在回路,没有产生电流,所以三相线上都只产生反电动势。此时,由于电机的转子依旧在转动以实现切割磁感线,电机的三相电机绕组将产生感生电动势,而且,由于三相电机绕组对应连接的三相桥臂处于不导通状态,因此可以通过构建各相列的电压回路方程来求解各相电机绕组的反电动势。
14、进一步地,在所述步骤c中,在从所述当前检测到的反电动势过零信号的检测时刻至下一个换相时刻期间,还存在以下步骤:步骤c1、通过锁相环产生初始电频率并获得参考电动势;然后执行步骤c2;其中,一相电机绕组产生的反电动势存在对应的电角度;步骤c2、判断参考电动势与定子当前产生的各相反电动势之间的差值是否均处于预设电动势差范围内,是则执行步骤c5,否则执行步骤c3;其中,定子当前产生的各相反电动势均是不通电相的电机绕组产生的反电动势;步骤c3、判断定子当前产生的其中一相反电动势对应的电角度是否为下一个换相点对应的电角度,是则为电机加载所述驱动信号并执行所述步骤b,否则获取定子当前产生的各相反电动势并执行步骤c4;步骤c4、控制锁相环对所述初始电频率进行积分得到待调节相位差,再将所述当前检测到的反电动势过零信号对应的电角度与待调节相位差的和值输入锁相环,产生新电频率并获得对应新参考电动势,再将新电频率更新为初始电频率,并将新参考电动势更新为参考电动势,然后执行步骤c2;步骤c5、确定锁相环输出的电频率收敛至一个目标电频率范围内,然后基于锁相环当前输出的电频率确定相位补偿量,再根据相位补偿量与当前检测到的反电动势过零信号对应的电角度确定转子绝对电角度,并将转子绝对电角度标记为锁相环估算得到的电角度;然后将转子绝对电角度设置为foc控制的输入电角度,并使用foc调节该输入电角度。由于方波控制与foc控制的方法差别大,且电流电压采样点不一致,所以采取前述步骤c1至步骤c5克服步骤b启动方波后到foc控制的切换过程存在的力矩负载较大而容易失步、堵转等启动难的问题,降低foc启动的难度和稳定性。
15、进一步地,所述反电动势过零信号对应的电角度在360度范围内包括30度、90度、150度、210度、270度和330度,使所述预知位置和所述预设数量个所述反电动势过零信号对应的电角度分居6个扇区;其中,6个扇区组成360度的电角度区间,每个扇区均是60度的电角度区间;所述反电动势过零信号被配置为在对应一个扇区内经过一个反电动势过零点的直线,该直线是对应一个扇区内的对称轴,当前换相点和下一个换相点在对应一个扇区内关于该直线对称;其中,反电动势过零点用于表示对应一个扇区内反电动势的极性改变的点;换相点位于相邻两个扇区之间的边界上,换相点相对于相邻两个扇区内的反电动势过零点分别形成30度的电角度区间。从而具有一对异性磁极的转子在三相电机绕组的磁场内转动过程中,可以依次越过6个不同磁场方向的扇区,并在旋转一圈过程中依次检测到6个不同的反电动势过零信号。
- 还没有人留言评论。精彩留言会获得点赞!