一种基于滑模控制的永磁同步电机位置控制方法及系统与流程
本发明属于电机控制技术领,尤其涉及一种基于滑模控制的永磁同步电机位置控制方法及系统。
背景技术:
1、在永磁同步电机传动系统中,一般采用电流环作为内环、速度环作为中间环、位置环作为外环的三环控制方法。但在一些对位置动态响应要求较高、对速度控制精度要求相对较低的工况下,速度环在系统中就成为一个串联延迟环节,极大的削弱了伺服系统位置控制的动态性能。因此在本发明中,将转速和位置环整合为一个闭环,然后采用滑模控制器对位置进行控制。
2、此外,永磁同步电机是一类具有强耦合性的高度非线性被控对象,而且存在大量的不确定因素,如模型参数不确定、外部扰动作用等。控制器设计过程中如果未考虑上述问题,系统的控制性能会极大降低,甚至导致无法完成给定任务。因此,设计高精度、强鲁棒性的控制器是永磁同步电机控制研究领域的重点与难点。以往的大量研究工作多使得控制算法较为复杂,带来了一定的计算成本,或者依赖精确的数学模型。而且现有技术在永磁同步电机位置控制中,控制精度低,而且依赖于电机精确的数学模型,使得磁同步电机位置控制过程繁琐,计算量大。并且现有技术需要强大计算能力且价格昂贵的处理器,设备成本高。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种基于滑模控制的永磁同步电机位置控制方法及系统。本发明将基于扩张状态观测器的方法对永磁同步电机进行控制。该方法只需要极少的被控对象模型信息,具有良好的控制性能且设计方法简单。
2、所述技术方案如下:基于滑模控制的永磁同步电机位置控制方法,包括:
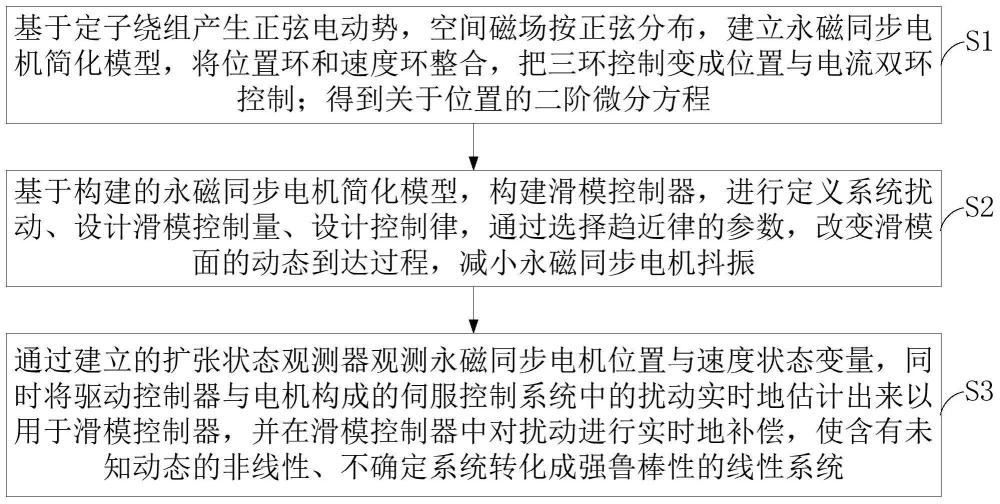
3、通过建立的扩张状态观测器观测永磁同步电机位置与速度状态变量,将驱动控制器与电机构成的伺服控制系统中的扰动实时地估计出来以用于滑模控制器,并在滑模控制器中对扰动进行实时地补偿,使含有未知动态的非线性、不确定系统转化成强鲁棒性的线性系统。
4、进一步,永磁同步电机的状态变量x1=θ,x3=f(t),则系统的状态空间描述为:
5、
6、式中,θ为电机转子角度,f(t)为系统扰动,i为控制输入,b为控制输入系数;
7、定义zi为系统状态变量xi的估计值,定义状态观测误差i=1,2,3,则扩张状态观测器写成如下的形式:
8、
9、式中,βi为观测器增益。
10、进一步,结合式(11)与公式(12)得到扩张状态观测器观测误差的动态方程为:
11、
12、式中,为状态观测误差的三阶导数,为状态观测误差的二阶导数,为状态观测误差的一阶导数;
13、通过选择扩张状态观测器增益使扩张状态观测器稳定。
14、进一步,将扩张状态观测器的所有极点设置在-ω0处,最后得到扩张状态观测器增益,表达式为:
15、
16、式中,ω0为扩张状态观测器带宽。
17、进一步,通过建立的扩张状态观测器观测永磁同步电机位置与速度状态变量前需进行:
18、s1,基于定子绕组产生正弦电动势,空间磁场按正弦分布,建立永磁同步电机简化模型,将位置环和速度环整合,把三环控制变成位置与电流双环控制;得到关于位置的二阶微分方程;
19、s2,基于构建的永磁同步电机简化模型,构建滑模控制器,进行定义系统扰动、设计滑模控制量、设计控制律,通过选择趋近律的参数,改变滑模面的动态到达过程,减小永磁同步电机抖振。
20、在步骤s1中,永磁同步电机在d,q旋转坐标系下的状态方程为:
21、
22、式中,id为定子电流d的轴分量,iq为定子电流q的轴分量,ud为定子电压d轴分量,uq为定子电压q轴分量,rs为定子电阻,ld为定子电感d轴分量,lq为定子电感q轴分量,对于面贴式永磁同步电机ld=lq=l,np为永磁同步电机极对数,ψf为转子永磁体磁链,θ为电机转子角度,tl为负载转矩,b为运动阻尼系数,j为转矩惯量。
23、在步骤s1中,得到关于位置的二阶微分方程,该方程为永磁同步电机转子角度的微分方程,改写为如下形式:
24、
25、其中,
26、
27、i=iq
28、式中,b为控制输入系数,i为控制输入;
29、定义系统扰动为:
30、
31、因此,式(2)写为:
32、
33、定义是f(t)的估计值,则控制律设计如下:
34、
35、式中,i0为滑模控制量。
36、在步骤s2中,设计滑模控制量,包括:
37、首先设计滑模面:
38、
39、其中,e=θd-θ,θd为电机转子给定角度,e为电机转子角度追踪误差,当s→0时,则e(t)以指数规律收敛,时间常数为1/c;
40、然后设计控制律,指数趋近律数学表达式为:
41、
42、其中,ξ>0,k>0,sgn(·)为符号函数。
43、进一步,选用饱和函数sat(s)近似代替,其中δ为饱和函数边界层的厚度:
44、
45、通过选择趋近律的参数ξ和k,改变滑模面的动态到达过程,实现减小抖振;
46、对式(6)求导,写为如下形式:
47、
48、将式(7)、式(8)、式(9)联立,得滑模控制律:
49、
50、其中,k决定到达滑模面的时间,k越大其时间越短,响应速度越快;ξ决定相轨迹接近开关面时的趋近速度,ξ减小则减弱抖振;c决定在滑模面上运动时趋近原点的速度,c增加则缩短到达原点的时间。
51、本发明的另一目的在于提供一种基于滑模控制的永磁同步电机位置控制系统,该系统实施所述的基于滑模控制的永磁同步电机位置控制方法,该系统包括:
52、永磁同步电机简化模型建立模块,基于定子绕组产生正弦电动势,空间磁场按正弦分布,建立永磁同步电机简化模型,将位置环和速度环整合,把三环控制变成位置与电流双环控制;得到关于位置的二阶微分方程;
53、滑模控制器构建模块,用于基于构建的永磁同步电机简化模型,构建滑模控制器,进行定义系统扰动、设计滑模控制量、设计控制律,通过选择趋近律的参数,改变滑模面的动态到达过程,减小永磁同步电机抖振振幅;
54、扩张状态观测器建立模块,用于通过建立的扩张状态观测器观测永磁同步电机位置与速度状态变量,同时将驱动控制器与电机构成的伺服控制系统中的扰动实时地估计出来以用于滑模控制器,并在滑模控制器中对扰动进行实时地补偿,使含有未知动态的非线性、不确定系统转化成强鲁棒性的线性系统。
55、结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明首先推导了永磁同步电机的数学模型,为控制算法设计奠定了基础。然后简化控制系统,将位置环和速度环整合,把三环控制变成位置与电流双环控制。最后针对模型参数的不确定性进行滑模控制器与扩张状态观测器的设计。本发明采用的扩张状态观测器可以准确估计出系统中存在的所有扰动,使滑模控制器产生相应的部分来补偿,进而提高控制系统的鲁棒性与动态性能。
56、本发明提出的基于扩张状态观测器的永磁同步电机位置控制方法,具有较高的控制精度与较强的鲁棒性,而且不依赖于电机精确的数学模型,设计方法简单,计算量小。本发明的技术方案算法简单,无需具有强大计算能力且价格昂贵的处理器,小型处理器即可完成,极大的降低了成本。本发明的技术方案解决了永磁同步电机鲁棒控制难题,对于电机运行过程中的扰动,本技术方案具有主动抑制能力。
- 还没有人留言评论。精彩留言会获得点赞!