一种基于卡尔曼滤波的异步电机矢量控制方法
本申请属于电机控制,具体地涉及一种基于卡尔曼滤波的异步电机矢量控制方法。
背景技术:
1、异步电机内部的电压、电流和磁场之间存在强耦合关系,而基于转子磁场定向的矢量控制算法能实现在同步旋转坐标系下的定子电流的转矩直流分量和励磁电流分量相位上的完全正交,最终可以实现近乎直流电机的调速特性。
2、基于转子磁场定向的矢量控制算法主要有电流-转速模型法、电压-电流模型法和转差率法等。为了进一步提高基于转子磁场矢量控制算法的适用范围和动态特性,解决的办法之一是对电机参数进行在线辨识。
3、目前主流的电机参数在线辨识方法大致可以分为三类:第一类是通过查表法,通过内置在程序里的事先标定好的转子电感,转子电阻通过观测器观测得到,进而得到转子时间常数,这类方法因为观测器参数不好调节以及计算量大,目前很难在实际工程中运用;第二类是运用人工神经网络等现代控制理论方法,这类方法由于计算量过大,目前实际工程应用不是很广泛;第三类是模型参考自适应法,通过基于无功功率的模型自适应地在线辨识转子时间常数,具有结构简单、计算量小和较为成熟等特点,更贴近于工程应用,但是该方法的精度和收敛速度还具有较大的提升空间。
技术实现思路
1、本申请的目的在于解决上述现有技术中存在的问题,提供一种基于卡尔曼滤波的异步电机矢量控制方法,该方法包括以下操作:
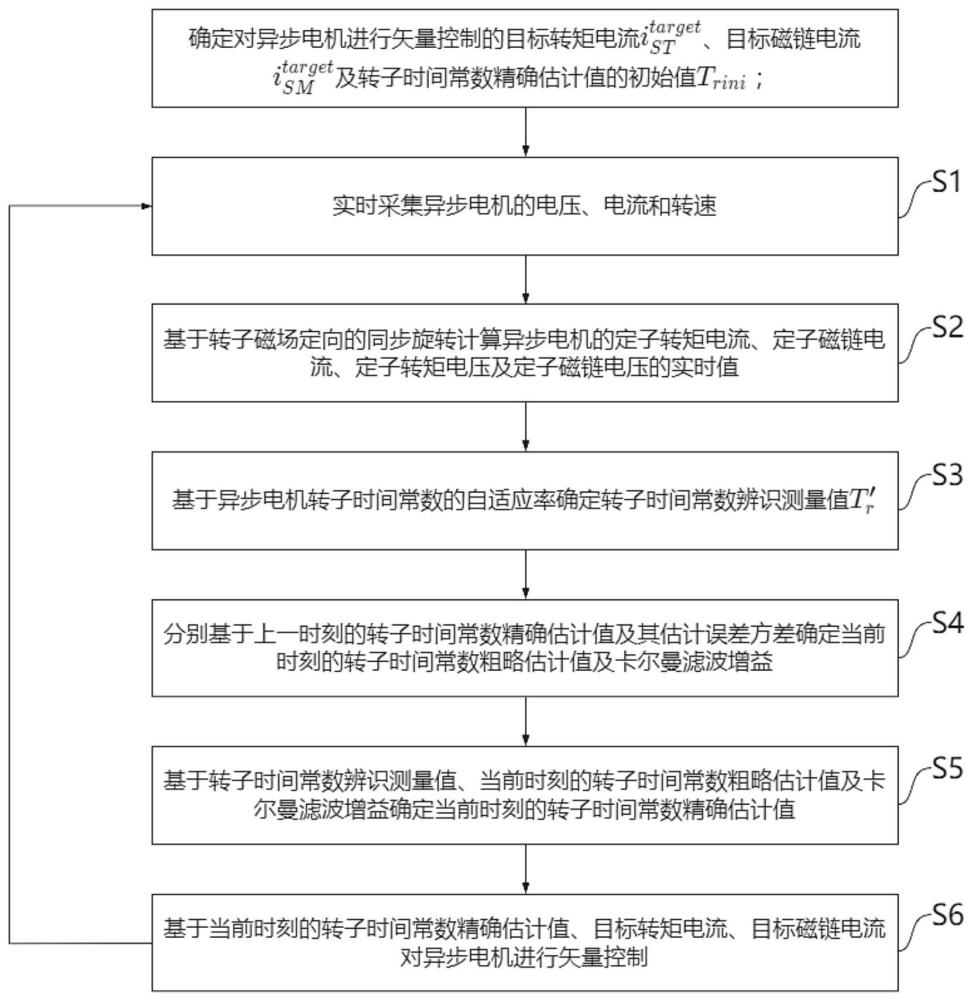
2、确定对异步电机进行矢量控制的目标转矩电流目标磁链电流及转子时间常数精确估计值的初始值
3、循环地执行以下步骤s1至s6:
4、s1,实时采集异步电机的电压、电流和转速;
5、s2,基于转子磁场定向的同步旋转计算异步电机的定子转矩电流、定子磁链电流、定子转矩电压及定子磁链电压的实时值;
6、s3,基于异步电机转子时间常数的自适应率确定转子时间常数辨识测量值tr';
7、s4,分别基于上一时刻的转子时间常数精确估计值及其估计误差方差确定当前时刻的转子时间常数粗略估计值及卡尔曼滤波增益;
8、s5,基于转子时间常数辨识测量值、当前时刻的转子时间常数粗略估计值及卡尔曼滤波增益确定当前时刻的转子时间常数精确估计值;
9、s6,基于当前时刻的转子时间常数精确估计值、目标转矩电流、目标磁链电流对异步电机进行矢量控制。
10、进一步地,所述转子时间常数精确估计值的初始值trini基于下式确定:
11、
12、其中,lr、rr分别为异步电机的转子电感和转子电阻。
13、进一步地,所述步骤s2进一步包括以下步骤:
14、s21,基于下式确定基于转子磁场定向的同步旋转坐标系与静止坐标系之间的转换因子θm:
15、
16、其中,wf为转差角速度,ist、ism分别为定子转矩电流和定子磁链电流,tr为转子时间常数,p为微分算子,ws为电角速度,wr为转子电角速度;
17、s22,基于所述转换因子θm对步骤s1中实时采集的异步电机的电压、电流和转速进行基于转子磁场定向的同步旋转,得到同步旋转坐标系下的定子转矩电流ist、定子磁链电流ism、定子转矩电压ust及定子磁链电压usm的实时值。
18、进一步地,步骤s3中所述基于异步电机转子时间常数的自适应率,具体为自适应地调节转子时间常数辨识测量值tr',直到无功功率反馈误差δq达到最小,其中,tr'、δq满足下式:
19、
20、上式中ls为异步电机的定子电感、kp和ki为pi参数,lm为等效励磁电感,kw为前馈系数,wc为截止频率。
21、进一步地,所述当前时刻的转子时间常数粗略估计值由下式确定:
22、tr(k∣k-1)=a*tr(k-1∣k-1)+b*u(k),
23、其中,a、b为系统参数,k为当前时刻,k-1为上一时刻,tr(k-1|k-1)为上一时刻的转子时间常数精确估计值,u(k)为当前时刻的控制变量,tr(k|k-1)为当前时刻的转子时间常数粗略估计值。
24、进一步地,所述当前时刻的卡尔曼滤波增益由下式确定:
25、kg(k)=p(k∣k-1)*h′/(h*p(k∣k-1)*h′+r),
26、其中,h为测量系统的参数,h′为h的转置,kg(k)为当前时刻的卡尔曼滤波增益,r为测量噪声的方差,p(k∣k-1)为当前时刻的转子时间常数粗略估计值的误差方差,由下式确定:
27、p(k∣k-1)=a*p(k-1∣k-1)*a′+q,
28、其中,p(k-1∣k-1)为前一时刻的转子时间常数精确估计值的误差方差,a′为a的转置,q为系统噪声的方差。
29、进一步地,所述当前时刻的转子时间常数精确估计值由下式确定:
30、tr(k∣k)=tr(k∣k-1)+kg(k)*(tr'-h*tr(k∣k-1))。
31、本申请的技术方案首先通过上一时刻的转子时间常数的精确估计值及其误差方差获取当前时刻的粗略估计值及卡尔曼滤波增益,然后基于对异步电机转子时间常数的测量值及卡尔曼滤波增益对粗略估计值进行修正以得到当前时刻的转子时间常数的精确估计值。使用本方法对异步电机进行矢量控制,能够在保证辨识精度的基础上有效地降低转子时间常数辨识结果的波动,有助于异步电机的稳定运行。
技术特征:
1.一种基于卡尔曼滤波的异步电机矢量控制方法,用于对异步电机进行矢量控制,其特征在于,包括以下操作,
2.根据权利要求1所述的基于卡尔曼滤波的异步电机矢量控制方法,其特征在于,所述转子时间常数精确估计值的初始值trini基于下式确定:
3.根据权利要求2所述的基于卡尔曼滤波的异步电机矢量控制方法,其特征在于,所述步骤s2进一步包括以下步骤:
4.根据权利要求3所述的基于卡尔曼滤波的异步电机矢量控制方法,其特征在于,步骤s3中所述基于异步电机转子时间常数的自适应率,具体为自适应地调节转子时间常数辨识测量值tr',直到无功功率反馈误差δq达到最小,其中,tr'、δq满足下式:
5.根据权利要求1所述的基于卡尔曼滤波的异步电机矢量控制方法,其特征在于,所述当前时刻的转子时间常数粗略估计值由下式确定:
6.根据权利要求5所述的基于卡尔曼滤波的异步电机矢量控制方法,其特征在于,所述当前时刻的卡尔曼滤波增益由下式确定:
7.根据权利要求6所述的基于卡尔曼滤波的异步电机矢量控制方法,其特征在于,所述当前时刻的转子时间常数精确估计值由下式确定:
技术总结
本申请提供一种基于卡尔曼滤波的异步电机矢量控制方法,包括以下操作:确定对异步电机进行矢量控制的目标转矩电流、目标磁链电流及转子时间常数精确估计值的初始值;循环执行以下步骤:实时采集异步电机的电压、电流和转速;计算异步电机的定子转矩电流、定子磁链电流、定子转矩电压及定子磁链电压的实时值;基于异步电机转子时间常数的自适应率确定转子时间常数辨识测量值;确定当前时刻的转子时间常数粗略估计值及卡尔曼滤波增益;确定当前时刻的转子时间常数精确估计值;基于当前时刻的转子时间常数精确估计值、目标转矩电流、目标磁链电流对异步电机进行矢量控制。本申请的方法能够在保证辨识精度的同时有效降低转子时间常数辨识结果的波动。
技术研发人员:王大方,许彭斌,李琪,孔德宽,方淇,廖前洋,焦振辰,赵硕
受保护的技术使用者:哈尔滨工业大学(威海)
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!