虚拟同步机并网系统的稳定性判定方法及装置与流程
本发明涉及虚拟同步机领域,尤其涉及一种虚拟同步机并网系统的稳定性判定方法及装置。
背景技术:
1、目前,锁相环(pll)是并网换流器不可缺少的组成部分之一。这类并网换流器通过测量公共耦合点(point of common coupling,pcc)的相位角,并通过矢量电流控制控制流过换流器的电流,使换流器的输出功率传输到主电网。目前,考虑到电网跟随(grid-following,gfl)换流器连接到一个相对较弱的交流系统时,可能会出现不稳定的现象,因此构网型(grid-forming,gfm)换流器近年来受到越来越多的关注。这种换流器在正常工作中充当一个电压源,以便提供必要的电压和频率支持。在系统遇到较大扰动时,构网型换流器中的电流饱和等控制器限制可能会被激活,使系统变成一个切换动态系统。
2、切换动态系统在自动控制领域得到了广泛的研究。其稳定性依赖于每个子系统的属性以及连接它们的切换逻辑。传统的理论认为如果系统共享一个共同的李雅普诺夫函数,则可以保证系统运行的全局渐进稳定。然而依赖这种技术方案对系统的稳定性进行判断时,其主要是针对线性切换动态系统的。但如果应用于非线性切换动态系统,会存在适用性问题,导致非线性切换动态系统的稳定性判断准确性较差。因此亟需一种针对非线性切换动态系统的稳定性判断方法,以确保其准确性。
技术实现思路
1、本发明提供了一种虚拟同步机并网系统的稳定性判定方法及装置,以解决现有技术非线性切换动态系统的稳定性判断的准确性低的技术问题。
2、为了解决上述技术问题,本发明实施例提供了一种虚拟同步机并网系统的稳定性判定方法,包括:
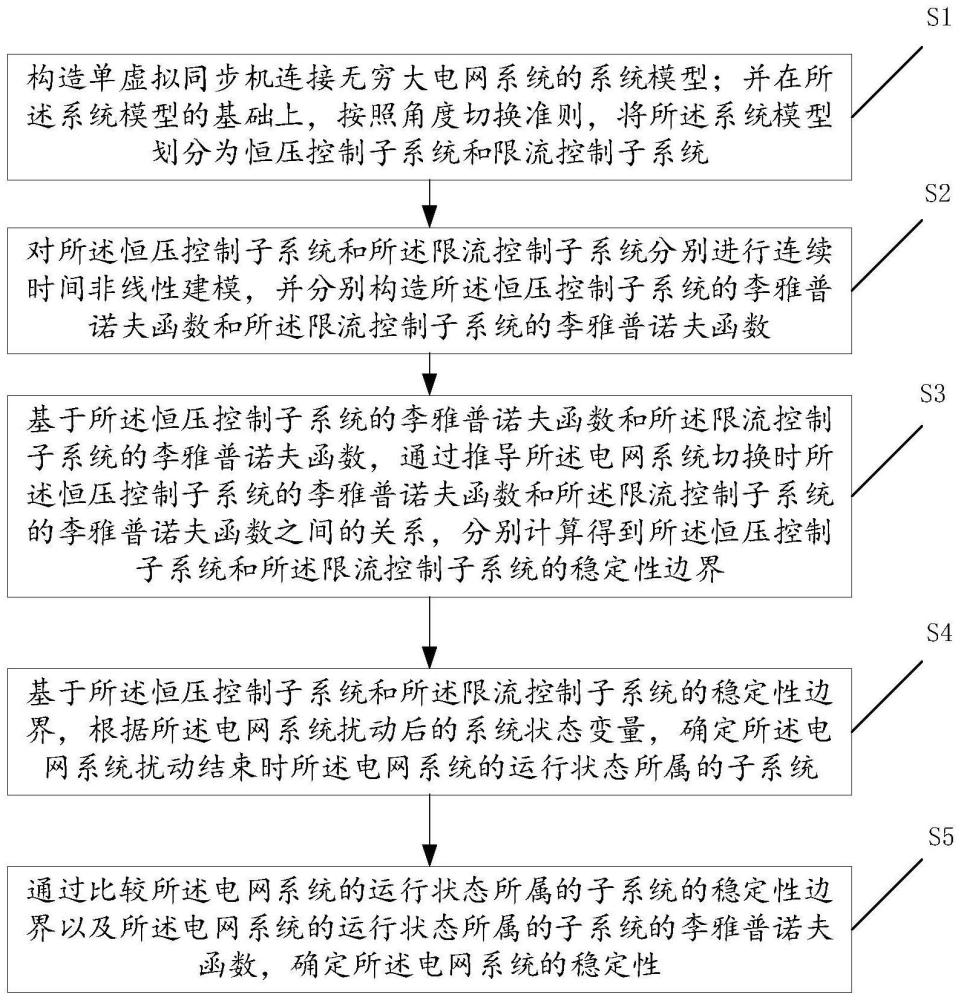
3、构造单虚拟同步机连接无穷大电网系统的系统模型;并在所述系统模型的基础上,按照角度切换准则,将所述系统模型划分为恒压控制子系统和限流控制子系统;
4、对所述恒压控制子系统和所述限流控制子系统分别进行连续时间非线性建模,并分别构造所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数;
5、基于所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数,通过推导所述电网系统切换时所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数之间的关系,分别计算得到所述恒压控制子系统和所述限流控制子系统的稳定性边界;
6、基于所述恒压控制子系统和所述限流控制子系统的稳定性边界,根据所述电网系统扰动后的系统状态变量,确定所述电网系统扰动结束时所述电网系统的运行状态所属的子系统;
7、通过比较所述电网系统的运行状态所属的子系统的稳定性边界以及所述电网系统的运行状态所属的子系统的李雅普诺夫函数,确定所述电网系统的稳定性。
8、作为优选方案,所述构造单虚拟同步机连接无穷大电网系统的系统模型,具体为:
9、根据下式构造所述系统模型:
10、
11、其中,up是公共耦合点电压幅值,us是无限大电网电压幅值,ωs是无限大电网角频率,icmax是换流器电流幅度限制,ll是线路侧的电感,θc是所述虚拟同步机提供的角度,φ为选定的系统饱和角,pc为所述虚拟同步机并网的有功功率。
12、作为优选方案,所述按照角度切换准则,将所述系统模型划分为恒压控制子系统和限流控制子系统,具体为:
13、当所述虚拟同步机提供的角度θc在预设范围内时,所述系统模型工作状态属于恒压控制子系统;当所述虚拟同步机提供的角度θc不在所述预设范围内时,所述系统模型工作状态属于限流控制子系统;
14、其中,所述预设范围为:
15、-cos-1(d)≤θc≤cos-1(d);
16、
17、其中,d为中间变量。
18、作为优选方案,所述对所述恒压控制子系统和所述限流控制子系统分别进行连续时间非线性建模,具体为:
19、采用下式分别对所述恒压控制子系统和所述限流控制子系统进行连续时间非线性建模:
20、
21、其中,x=θc-θc(0),y=ωc-ωs,x和y均为中间变量,θc(0)是状态变量θc的稳态值,ωc是换流器输出频率,f(x)和g(x)为构造李雅普诺夫函数的中间量,和分别为所述电网系统切换时的左切换线和右切换线,dc为换流器的虚拟阻尼。
22、作为优选方案,所述分别构造所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数,具体为:
23、根据下式构造所述恒压控制子系统的李雅普诺夫函数v1(x,y):
24、
25、根据下式构造所述限流控制子系统的李雅普诺夫函数v2(x,y):
26、
27、其中,f(x)为f(x)的变上限积分,g(x)为g(x)的变上限积分。
28、作为优选方案,所述恒压控制子系统的稳定性边界v1max为:
29、
30、
31、
32、其中,和分别为所述恒压控制子系统的左右稳定边界;
33、所述限流控制子系统的稳定性边界v2max为:
34、
35、其中,为右平衡点。
36、作为优选方案,所述通过比较所述电网系统的运行状态所属的子系统的稳定性边界以及所述电网系统的运行状态所属的子系统的李雅普诺夫函数,确定所述电网系统的稳定性,具体为:
37、若所述电网系统的运行状态属于所述恒压控制子系统,根据所述恒压控制子系统的李雅普诺夫函数计算扰动结束时的第一函数值,当所述第一函数值小于所述恒压控制子系统的稳定性边界,则判断所述电网系统稳定;当所述第一函数值大于等于所述恒压控制子系统的稳定性边界,则判断所述电网系统不稳定;
38、若所述电网系统的运行状态属于所述限流控制子系统,根据所述限流控制子系统的李雅普诺夫函数计算扰动结束时的第二函数值,当所述第二函数值小于所述限流控制子系统的稳定性边界,则判断所述电网系统稳定;当所述第二函数值大于等于所述限流控制子系统的稳定性边界,则判断所述电网系统不稳定。
39、相应的,本发明实施例还提供了一种虚拟同步机并网系统的稳定性判定装置,包括划分模块、构造模块、边界确定模块、判断模块和稳定性判定模块;其中,
40、所述划分模块,用于构造单虚拟同步机连接无穷大电网系统的系统模型;并在所述系统模型的基础上,按照角度切换准则,将所述系统模型划分为恒压控制子系统和限流控制子系统;
41、所述构造模块,用于对所述恒压控制子系统和所述限流控制子系统分别进行连续时间非线性建模,并分别构造所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数;
42、所述边界确定模块,用于基于所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数,通过推导所述电网系统切换时所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数之间的关系,分别计算得到所述恒压控制子系统和所述限流控制子系统的稳定性边界;
43、所述判断模块,用于基于所述恒压控制子系统和所述限流控制子系统的稳定性边界,根据所述电网系统扰动后的系统状态变量,确定所述电网系统扰动结束时所述电网系统的运行状态所属的子系统;
44、所述稳定性判定模块,用于通过比较所述电网系统的运行状态所属的子系统的稳定性边界以及所述电网系统的运行状态所属的子系统的李雅普诺夫函数,确定所述电网系统的稳定性。
45、相应的,本发明实施例还提供了一种终端设备,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现所述的虚拟同步机并网系统的稳定性判定方法。
46、相应的,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行所述的虚拟同步机并网系统的稳定性判定方法。
47、相比于现有技术,本发明实施例具有如下有益效果:
48、本发明实施例提供了一种虚拟同步机并网系统的稳定性判定方法及装置,所述稳定性判定方法包括:构造单虚拟同步机连接无穷大电网系统的系统模型;并在所述系统模型的基础上,按照角度切换准则,将所述系统模型划分为恒压控制子系统和限流控制子系统;对所述恒压控制子系统和所述限流控制子系统分别进行连续时间非线性建模,并分别构造所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数;基于所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数,通过推导所述电网系统切换时所述恒压控制子系统的李雅普诺夫函数和所述限流控制子系统的李雅普诺夫函数之间的关系,分别计算得到所述恒压控制子系统和所述限流控制子系统的稳定性边界;基于所述恒压控制子系统和所述限流控制子系统的稳定性边界,根据所述电网系统扰动后的系统状态变量,确定所述电网系统扰动结束时所述电网系统的运行状态所属的子系统;通过比较所述电网系统的运行状态所属的子系统的稳定性边界以及所述电网系统的运行状态所属的子系统的李雅普诺夫函数,确定所述电网系统的稳定性。实施本发明,通过对恒压控制子系统和限流控制子系统分别进行连续时间非线性建模,构造两者的李雅普诺夫函数,从而计算得到稳定性边界,相比现有技术对非线性切换动态系统具有更高的适用性,在针对非线性切换动态系统进行稳定性的判定时准确性更高。
- 还没有人留言评论。精彩留言会获得点赞!