考虑振荡源定位的直流配电网自适应模型预测控制方法
本发明属于电力系统电压控制,具体涉及考虑振荡源定位的直流配电网自适应模型预测控制方法。
背景技术:
1、随着经济的发展以及用户侧需求的改变,新能源、电动汽车、储能等获得了长足的发展。目前,我国新能源发电总量已经超过万亿千瓦时,特别是光伏发电,年度新增装机容量更是超过了传统发电站。另外,我国电动汽车发展也是处于全球领先水平,新能源汽车数量从2018年的107万辆到2022年的535万辆;2023年上半年,中国汽车出口数量已经跃居世界首位,其中新能源汽车出口占25%。
2、同时为了提高风电、光伏等新能源的消纳能力,充分利用新能源的调节能力,储能也得到了迅速发展,截至2022我国新型储能累计规模达到13.1gw,功率规模年增长率达128%。直流配电网因为可以减少直流负荷和新能源接入的能量转换环节、具有结构多样及灵活易控等优势,受到了广泛关注与应用。
3、直流电压的稳定是系统能正常运行的前提,也是衡量系统供电端和负荷端功率平衡的最直接的体现。然而随着分布式电源、储能系统和多元化交直流负荷的接入,直流配电网呈现高比例新能源化和高比例电力电子化的趋势,这也加重了多端直流系统弱阻尼、低惯性等问题。同时接入直流电网的变流器在采用闭环控制时会呈现出恒功率负载特性,这进一步降低了系统稳定裕度,使系统受到扰动时更加敏感。这些原因导致可再生能源的随机性出力及多元负荷的功率突变更加容易引发直流电压的振荡,加剧了直流配电网的电压稳定性问题。
4、因为直流配电系统自身特性,导致可再生能源的随机性出力及多元负荷的功率突变容易引发直流电压的振荡。对于电力系统,消除电压振荡最直接有效的措施就是及时定位振荡源进而调整其控制参数。目前对于直流系统振荡源定位的研究虽然已经展开,但是基于振荡源定位的电压稳定控制方法却鲜见报道。
技术实现思路
1、根据以上现有技术中的不足,本发明提供了一种考虑振荡源定位的直流配电网自适应模型预测控制方法,可以根据直流配电系统各个部分的实时状态不断优化其控制参数,以最小控制成本消除振荡,同时显著提高了直流配电网响应性能。
2、为达到以上目的,本发明提供了一种考虑振荡源定位的直流配电网自适应模型预测控制方法,包括以下步骤:
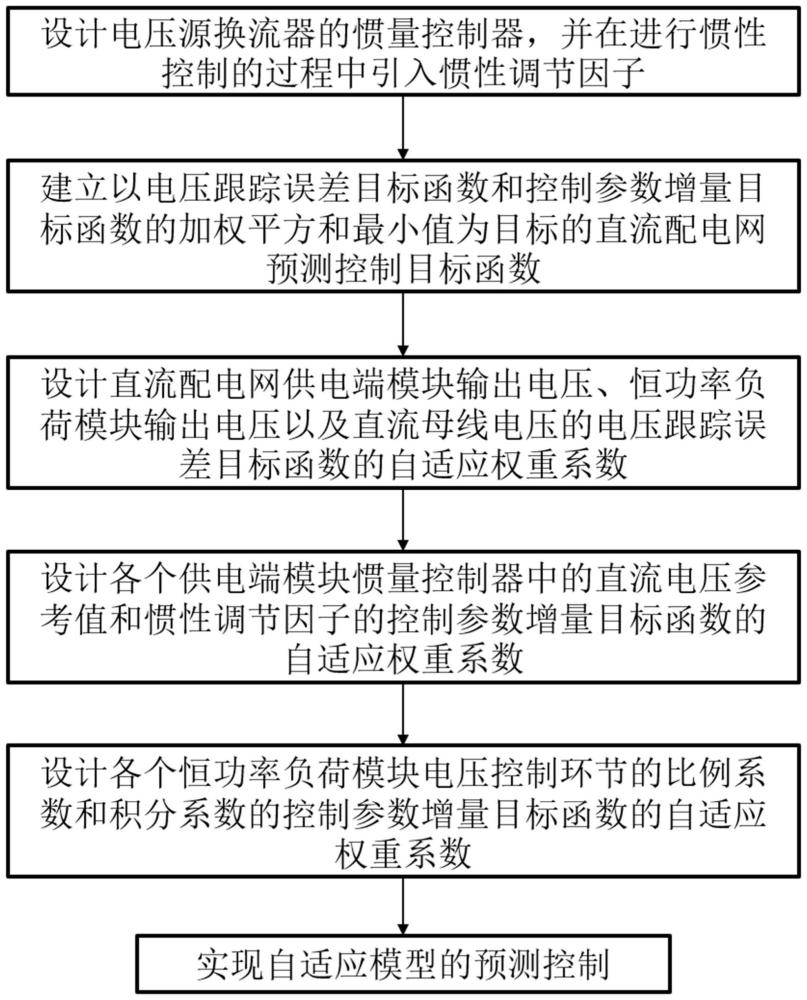
3、s1、针对直流配电网低惯量特性,基于传统下垂控制的供电端模块,并结合高通滤波环节设计电压源换流器的惯量控制器,并在进行惯性控制的过程中引入惯性调节因子kip;为后续利用自适应模型预测控制实时优化惯性环节提供基础;
4、s2、直流配电网分为供电端模块、恒功率负荷模块和直流线路网络三部分,建立以电压跟踪误差目标函数和控制参数增量目标函数的加权平方和最小值为目标的直流配电网预测控制目标函数,其中;
5、电压跟踪误差目标函数结合直流配电网供电端模块输出电压、恒功率负荷模块输出电压及直流母线电压(即为直流线路网络的直流母线电压)的跟踪误差建立;
6、控制参数增量目标函数结合供电端模块惯量控制器中的直流电压参考值增量、惯性调节因子kip增量和恒功率负荷模块电压控制环节的比例系数kkr1增量、积分系数kkr增量建立;
7、s3、考虑直流配电网供电端模块、恒功率负荷模块输出电压及直流母线电压的实时振荡情况,设计直流配电网供电端模块输出电压、恒功率负荷模块输出电压以及直流母线电压的电压跟踪误差目标函数的自适应权重系数;
8、s4、结合直流配电网供电端模块输出电压的实时振荡情况及供电端模块的振荡源定位指标,设计各个供电端模块惯量控制器中的直流电压参考值和惯性调节因子kip的控制参数增量目标函数的自适应权重系数;
9、s5、结合直流配电网恒功率负荷模块输出电压的实时振荡情况及恒功率负荷模块的振荡源定位指标,设计各个恒功率负荷模块电压控制环节的比例系数kkr1和积分系数kkr的控制参数增量目标函数的自适应权重系数;
10、s6、通过s1-s5中建立的惯量控制器、目标函数和自适应权重系数,构成直流配电网的自适应模型,从而实现自适应模型的预测控制。
11、所述的s1中,基于传统下垂控制的供电端模块,结合高通滤波环节设计电压源换流器的惯量控制器,在此过程中引入惯性调节因子kip,其初始值为固定值(后续可利用自适应模型预测控制优化其值达到为直流配电网灵活提供惯性支撑的作用);
12、其中,第i个供电端模块的惯性控制器,以惯性调节因子kip和直流电压参考值为输入控制变量的状态微分方程为:
13、
14、式中:vsci为第i个供电端模块的电压源换流器;ki、udci、pi、pi,ref分别为vsci的下垂系数、电压实测值、电压参考值、功率实测值和功率参考值;iid、iid,ref和iiq、iiq,ref分别为vsci的dq轴电流实测值和电流参考值;kiu1、kiu为电压外环的控制参数;ki1、ki和kiq1、kiq分别为dq轴电流内环的比例积分环节控制参数;iia、iib、iic为vsci交流并网侧的三相电流;li、ri分别为vsci交流侧滤波电感/等效电阻;uiao、uibo、uico分别为vsci桥臂侧的三相电压;udci、idci表示vsci直流侧电压/电流;uid/uiq和id/iq分别为交流侧电压/电流的dq轴分量;uiod/uioq分别为换流器交流侧电压的dq轴分量;ω代表交流电源基波角频率;sid/siq为dq轴电流的开关函数;ei为下垂控制的误差信号,zi为中间变量,δi为暂态电压变化量;wiu、wid、wiq为vsci比例积分环节的中间变量。
15、所述的s2中,建立的直流配电网预测控制目标函数:
16、
17、其约束条件为:
18、
19、式中:r(h)为h时刻供电端模块输出电压、恒功率负荷模块输出电压及直流母线电压的参考电压矩阵,为直流母线参考电压;γy,j为供电端模块输出电压、恒功率负荷模块输出电压及直流母线电压的电压跟踪误差目标函数的权重系数;γw为供电端模块输出电压、恒功率负荷模块的控制参数增量目标函数的权重系数;为在预测时刻j对预测输出的第t个分量误差的权重系数,其值越大表明期望对应的控制输出越接近给定的参考输入;为在预测时刻j对控制增量的第t个分量误差的权重系数,其值越大表明期望对应的控制动作变化越小;yp(h)、δx(h)、δwd(h)、y(h)、δw(h)分别为直流配电网预测输出矩阵及状态矩阵、扰动矩阵、输出矩阵、控制矩阵的离散矩阵;sx、sw、sd、sy为预测输出方程中δx(h)、δw(h)、δwd(h)、y(h)的系数;pi,max为vsci的有功功率最大值;cplk为第k个恒功率负荷;lk、clk、dk、ukr,min为cplk的输出侧滤波电感、输出侧滤波电容、占空比的稳态量、输出电压最小值;ts为采样步长;kkr1、kkr为cplk电压控制的比例系数和积分参数,kr1,max为比例系数最大值。
20、所述的s3中,电压跟踪误差目标函数的权重系数在电压偏移较大时快速增大,以快速减小偏差,当电压偏移降低到一定程度后随之减小,以消除稳态偏差,由此设计供电端模块输出电压、恒功率负荷模块输出电压以及直流母线电压跟踪误差的自适应权重系数,包括:
21、第i个供电端模块输出电压的电压跟踪误差目标函数的自适应权重系数为:
22、
23、第k个恒功率负荷模块输出电压的电压跟踪误差目标函数的自适应权重系数为:
24、
25、直流母线电压的电压跟踪误差目标函数的自适应权重系数为:
26、
27、式中:分别为第i个供电端模块、第k个恒功率负荷模块及直流母线电压误差跟踪权重系数的初始值;为分别为第i个供电端模块、第k个恒功率负荷模块及直流母线电压的的电压跟踪误差目标函数的权重调整系数;为第i个供电端模块、第k个恒功率负荷模块及直流母线电压的电压跟踪误差目标函数权重系数的初值;udci(h+j∣h)、ukr(h+j∣h)、udc(h+j∣h)分别为第i个供电端模块、第k个恒功率负荷模块及直流母线电压在预测时刻j的电压实测值;分别为第i个供电端模块、第k个恒功率负荷模块及直流母线电压在预测时刻j的电压参考值。
28、所述的s4中,对于振荡源所在的供电端模块,期望其控制动作较大来有效抑制振荡,其控制参数增量目标函数的权重系数需要设置的较小,对于非振荡源则相反;在考虑直流配电网状态变化的基础上,将振荡源定位指标作为权重调整因子,同时考虑控制增量的变化量δw,设计各个供电端模块惯量控制器中的惯量调节因子和参考电压的控制参数增量目标函数的自适应权重系数为:
29、当∣δw(h-1)∣≥δwmax时,控制增量大于直流配电网能承受的最大控制增量,权重系数应该保持在最小值,在保证最大控制效果的同时限制控制增量;因此,第i个供电端模块的控制参数增量目标函数的权重系数为:
30、
31、当∣δw(h-1)∣<δwmax时,控制增量在直流配电网能承受的最大范围内,加权因子根据直流配电网状态自适应调整;因此,第i个供电端模块的控制参数增量目标函数的权重系数表示为:
32、
33、式中:θi为功率模块i的振荡源定位指标,若功率模块i为非振荡源,其判定指标满足θi≈0,而对于振荡源模块,其判定指标满足θi>>0;为和kip的控制参数增量目标函数的权重系数的最小值,δwmax为直流配电网能承受的控制增量的最大值。
34、所述的s5中,对于振荡源所在的恒功率负荷模块,期望其控制动作较大来有效抑制振荡,因此其控制参数增量目标函数的权重系数要设置的较小,对于非振荡源所在的恒功率负荷模块则相反;另外,考虑输出电压的振荡情况,当电压振荡幅值较大时,适当的增大比例系数kkr1,提高直流配电网的响应速度从而加快输出电压的追踪速度;当电压偏差较小时,容易出现超调现象,此时要调整积分系数kkr以提高电压控制精度从而消除电压偏差;同时,考虑电压控制参数的变化量e,设计的第k个恒功率负荷模块的比例系数kkr1和积分系数kkr的控制参数增量目标函数的自适应权重系数为:
35、当e(k)≥δ时,调整比例系数kkr1,快速减小电压偏差,因此,第k个恒功率负荷模块的控制参数增量目标函数的权重系数为:
36、
37、当偏差降低到一定程度后,即e(k0<δ时,调整比例系数kkr1和积分系数kkr,减小比例控制作用,配合电压追踪,最终消除稳态偏差,因此,第k个恒功率负荷模块的控制参数增量目标函数的权重系数为:
38、
39、式中:θk为功率模块k的振荡源定位指标;α、β分别为比例系数kkr1和积分系数kkr增量的调节系数;γk,1、γk为kkr1、kkr控制参数增量目标函数的权重系数的初始值;δ为电压控制的误差临界值。
40、本发明涉及的算法可以通过电子设备执行,电子设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,通过处理器执行软件实现上述的算法。
41、本发明所具有的有益效果是:
42、当直流配电网受到扰动而发生振荡时,本发明方法可以根据直流电压波动信息和振荡源定位指标调整目标函数的加权系数,自适应调整控制参数增量,显著地减小在稳定控制过程中可再生能源的随机性出力及多元负荷的功率突变对直流配电网的冲击。
43、本发明以电压波动和控制增量的加权平方和最小为目标,利用自适应加权系数在每个采样周期更新预测模型,可以根据直流配电网各个部分的实时状态不断优化其控制参数,从而以最小控制成本消除振荡。
44、本发明在下垂控制的基础上,结合高通滤波环节提出直流配电网的虚拟惯量控制并且引入了惯性调节因子,然后结合电压振荡情况利用自适应模型预测控制对惯量调节因子及参考进行实时优化,有效提高了直流配电网惯量,改善了直流母线电压跌落问题。
- 还没有人留言评论。精彩留言会获得点赞!