一种基于径向神经网络的惯量阻尼控制方法及系统
本发明涉及电网控制,尤其涉及一种基于径向神经网络的惯量阻尼控制方法。
背景技术:
1、随着可再生能源发电占比越来越大,惯性和阻尼将越来越少,严重威胁到电网运行的稳定和可靠性。可再生能源发电具有波动性和不确定性,使得电网中的惯量和阻尼减少,从而导致电网频率波动过大,甚至引发大规模断电。
2、电网频率是反映电网供需平衡的重要指标,其稳定性取决于电网中的惯量和阻尼。惯量可以缓冲电网中的功率波动,阻尼可以抑制电网中的振荡。
3、文献“self-adaptive virtual inertia control-based fuzzy logic toimprove frequency stability of microgrid with high renewable penetration [j].ieee access,2019,7:76071-83.(基于模糊逻辑的自适应虚拟惯量控制提高高可再生渗透率微电网频率稳定性[j]. ieee access杂志, 2019, 7:76071-83.)”公开了一种使用模糊逻辑的自适应虚拟惯性控制系统,利用实功率注入的输入信号和系统频率偏差,自动调整虚拟惯量常数,以确保频率的稳定。该方案也是利用智能控制技术来优化虚拟同步机的参数,实现快速惯性响应和频率稳定。但是该方案的不足之处是,模糊控制算法的设计完全是基于经验的,没有明确的理论依据,存在参数设计粗略问题,而且没有考虑阻尼的影响。
技术实现思路
1、本发明提供一种基于径向神经网络的惯量阻尼控制方法,包括:
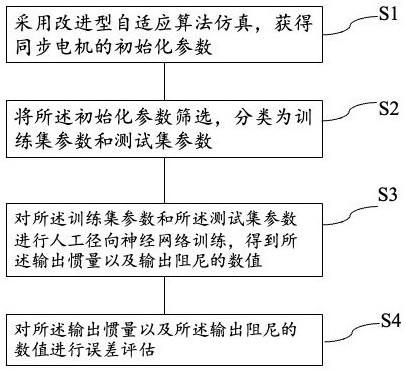
2、采用改进型自适应算法仿真,获得同步电机的初始化参数;
3、所述初始化参数包括角速度、角速度偏移率、输出惯量以及输出阻尼;
4、将所述初始化参数筛选,分类为训练集参数和测试集参数;
5、对所述训练集参数和所述测试集参数进行人工径向神经网络训练,得到所述输出惯量以及输出阻尼的数值;
6、对所述输出惯量以及所述输出阻尼的数值进行误差评估。
7、需要说明的是,所述人工径向神经网络为径向基函数网络(rbf),具有以下结构和连接方式:
8、(1)输入层由两个神经元组成,分别接收电网频率偏差和功率波动作为输入信号;
9、(2)隐含层由若干个神经元组成,每个神经元对应一个高斯基底函数,根据输入信号的特征点自适应调整基底函数的中心值、标准偏差和权重;
10、(3)输出层由两个神经元组成,分别输出虚拟惯量和阻尼系数作为控制信号。
11、需要说明的是,对所述训练集参数和所述测试集参数进行人工径向神经网络训练的步骤包括:
12、;
13、其中,表示的是第i个的所述输出惯量;表示的是第i个的所述输出阻尼,i表示序列号,m表示当前隐含层神经元的个数;
14、其中,是第i个的角速度,是第i个的角速度偏移率,是第i个的标准偏差,是第i个的基底函数中心值。
15、需要说明的是,所述的计算公式为:;
16、其中,所述表示最近的聚类基点,表示距离,表示重叠系数。
17、需要说明的是,所述重叠系数为一个正实数,用于控制高斯基底函数的宽度,其取值范围为(0,1),其确定方法为:,其中,为聚类基点之间的最大距离。
18、需要说明的是,对所述训练集参数和所述测试集参数进行人工径向神经网络训练的步骤还包括:
19、判断k个和k-1个的训练集参数的误差;
20、将所述训练集参数的误差和设定好的参数数值大小进行比较;
21、所述训练集参数的误差小于设定好的参数数值,则进行:
22、;
23、其中,表示的是第i个的所述输出惯量;表示的是第i个的所述输出阻尼,i表示序列号,m表示当前隐含层神经元的个数;
24、其中,是第i个的角速度,是第i个的角速度偏移率,是第i个的标准偏差,是第i个的基底函数中心值。
25、需要说明的是,对所述训练集参数和所述测试集参数进行人工径向神经网络训练的步骤还包括:
26、判断k个和k-1个的训练集参数的误差;
27、需要进一步说明的是,所述k的含义是当前训练集参数个数,所述k-1的含义是上一个训练集参数个数。因此该步骤也可以表示为:判断当前训练集参数个数k与上一次训练集参数个数k-1之间的误差。
28、将所述训练集参数的误差和设定好的参数数值大小进行比较;
29、所述训练集参数的误差大于设定好的参数数值,则调整第i个聚类基点和权重的数值大小;
30、进一步的,所述“调整第i个聚类基点和权重的数值大小”的步骤包括:
31、计算误差函数,其中,为输出层神经元个数,为期望输出值,为实际输出值;
32、计算权重和第i个聚类基点对误差函数的偏导数;
33、根据偏导数更新权重和第i个聚类基点;
34、重复以上步骤直到误差函数达到最小值或满足停止条件;
35、当所述训练集参数的误差小于设定好的参数数值,调整到所述训练集参数的误差小于设定好的参数数值,则进行:
36、;
37、其中,表示的是第i个的所述输出惯量;表示的是第i个的所述输出阻尼,i表示序列号,m表示当前隐含层神经元的个数;
38、其中,是第i个的角速度,是第i个的角速度偏移率,是第i个的标准偏差,是第i个的基底函数中心值。
39、需要说明的是,对所述输出惯量以及所述输出阻尼的数值进行误差评估的步骤包括:
40、对所述输出惯量的误差值进行统计;
41、对所述输出阻尼的误差值进行统计;
42、判断所述输出惯量的误差率是否小于千分之一;
43、判断所述输出阻尼的误差率是否小于千分之一。
44、一种基于径向神经网络的惯量阻尼控制系统,包括:
45、采样模块,用于采用改进型自适应算法仿真,获得同步电机的初始化参数;
46、所述初始化参数包括角速度、角速度偏移率、输出惯量以及输出阻尼;
47、信号处理模块,用于将所述初始化参数筛选,分类为训练集参数和测试集参数;
48、径向神经网络控制模块,用于对所述训练集参数和所述测试集参数进行人工径向神经网络训练,得到所述输出惯量以及输出阻尼的数值;
49、误差评估模块,用于对所述输出惯量以及所述输出阻尼的数值进行误差评估。
50、需要说明的是,所述径向神经网络控制模块包括:
51、判断单元,用于判断k个和k-1个的训练集参数的误差;
52、比较单元,用于将所述训练集参数的误差和设定好的参数数值大小进行比较;
53、运算单元,用于所述训练集参数的误差小于设定好的参数数值,则进行:
54、;
55、其中,表示的是第i个的所述输出惯量;表示的是第i个的所述输出阻尼,i表示序列号,m表示当前隐含层神经元的个数;
56、其中,是第i个的角速度,是第i个的角速度偏移率,是第i个的标准偏差,是第i个的基底函数中心值。
57、需要说明的是,所述径向神经网络控制模块包括:
58、判断单元,将所述训练集参数的误差和设定好的参数数值大小进行比较;
59、比较单元,所述训练集参数的误差大于设定好的参数数值,则调整第i个聚类基点和权重的数值大小;
60、调整单元,调整到所述训练集参数的误差小于设定好的参数数值;
61、运算单元,运行如下公式:
62、;
63、其中,表示的是第i个的所述输出惯量;表示的是第i个的所述输出阻尼,i表示序列号,m表示当前隐含层神经元的个数;
64、其中,是第i个的角速度,是第i个的角速度偏移率,是第i个的标准偏差,是第i个的基底函数中心值。
65、需要说明的是,所述误差评估模块包括:
66、统计单元,用于对所述输出惯量的误差值进行统计;用于对所述输出阻尼的误差值进行统计;
67、误差判断单元,用于判断所述输出惯量的误差率是否小于千分之一;判断所述输出阻尼的误差率是否小于千分之一。
68、与现有技术相比,本发明所选用的基于径向神经网络的惯量阻尼控制方法,采用改进型自适应算法仿真,获得同步电机的初始化参数;所述初始化参数包括角速度、角速度偏移率、输出惯量以及输出阻尼;将所述初始化参数筛选,分类为训练集参数和测试集参数;对所述训练集参数和所述测试集参数进行人工径向神经网络训练,得到所述输出惯量以及输出阻尼的数值;对所述输出惯量以及所述输出阻尼的数值进行误差评估。本发明利用径向神经网络控制技术可以同时考虑惯性和阻尼的作用,优化外特性,增强电网的稳定性和可靠性,而现有技术没有考虑阻尼的影响;可以提高控制精度和响应速度,优化参数设计和调整,而现有技术的超调量和调节时间较大,控制效果不佳。本发明利用径向神经网络控制技术可以实现功率输出更加平滑、超调量更小、频率偏差更小、功率波动抑制更好等优异的动态性能;还可以实现快速收敛、高精度、低复杂度、强泛化能力等特点,并通过调整聚类基点和权重来优化网络结构和参数。
- 还没有人留言评论。精彩留言会获得点赞!