一种滑膜观测器的滑膜面摆幅的调控方法以及系统与流程
本发明涉及电力电子,尤其是涉及一种滑膜观测器的滑膜面摆幅的调控方法以及系统。
背景技术:
1、永磁同步电机(pmsm)无感foc控制时,需要观测器来计算角度,滑膜观测器(smo)是其中比较主流的算法。
2、smo中z((滑膜面摆幅))的取值会对观测器的效果有明显的影响,传统的方式是给z一个固定值,让滑模面在+z、-z之间摆动。
3、实际应用中该传统方式有很大的局限性,容易造成观测器估算的电流is*误差和抖动过大,影响估算的反电动势值偏差较大,从而最终造成观测的角度偏差过大,严重时会引起电机运行错误。
技术实现思路
1、为了使观测电流更加接近真实电流,减少误差,从而估算得到的反电动势值就越准确,那么基于此得到的转子角度和速度信息就越准确,本技术提供一种滑膜观测器的滑膜面摆幅的调控方法以及系统。
2、第一方面,本技术提供一种滑膜观测器的滑膜面摆幅的调控方法,采用如下的技术方案:
3、一种滑膜观测器的滑膜面摆幅的调控方法,包括:
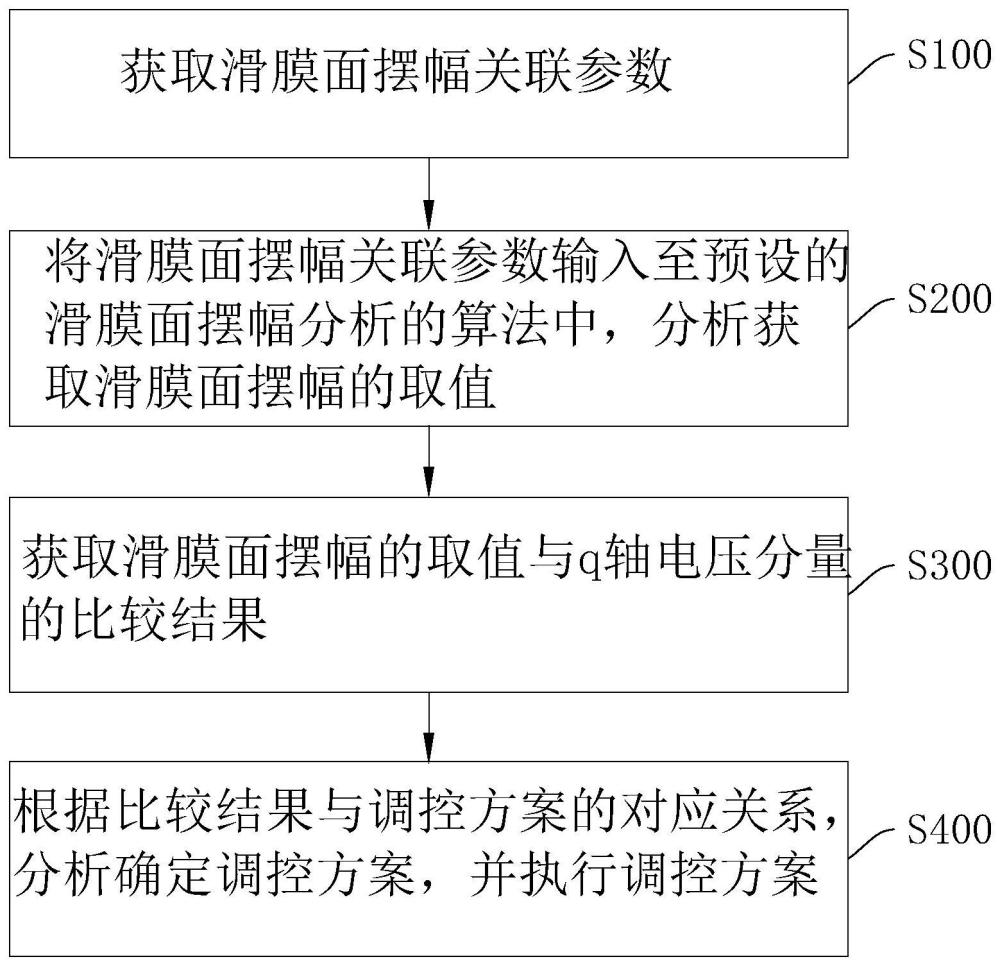
4、获取滑膜面摆幅关联参数,滑膜面摆幅关联参数包括采样电流、q轴电压分量;
5、将滑膜面摆幅关联参数输入至预设的滑膜面摆幅分析的算法中,分析获取滑膜面摆幅的取值,滑膜面摆幅分析的算法如下:z = ie * vq/maxerr,z为滑膜面摆幅的取值,ie= 估算电流is* - 采样电流is ,vq为q轴电压分量,maxerr为最大电流误差常量;
6、获取滑膜面摆幅的取值与q轴电压分量的比较结果;
7、根据比较结果与调控方案的对应关系,分析确定调控方案,并执行调控方案。
8、通过采用上述技术方案,滑膜面摆幅的取值会与当前电机施加的电压vq成正比,z在滑膜面上的摆幅会跟随vq变化,使得估算电流is* 的算法更符合电机等效模型,有效减小is*突变,从而减小估算电流is* 与采样电流is的差值ie。而ie又会影响下一次z的取值,使得z取值更准确,即观测器能更快的收敛,并且减小估算误差。
9、可选的,根据比较结果与调控方案的对应关系,分析确定调控方案包括:
10、若滑膜面摆幅的取值大于q轴电压分量,则将滑膜面摆幅的取值修正为q轴电压分量,并根据滑膜面摆幅的取值反向分析确定估算电流,并跳转至将滑膜面摆幅关联参数输入至预设的滑膜面摆幅分析的算法中的步骤中;
11、若滑膜面摆幅的取值小于负的q轴电压分量,则将滑膜面摆幅的取值修正为负的q轴电压分量,并根据滑膜面摆幅的取值反向分析确定估算电流,并跳转至将滑膜面摆幅关联参数输入至预设的滑膜面摆幅分析的算法中的步骤中。
12、通过采用上述技术方案,具体公开了如何根据滑膜面摆幅的取值与的q轴电压分量的比较结果作滑膜面摆幅的调控,有效提高了估算电流的估算准确率。
13、可选的,还包括与执行调控方案并行的步骤,具体如下:
14、获取电机实际受控于滑膜观测器时的关联参数数值,关联参数包括电机机械磨损、噪声以及能耗;
15、分析电机实际受控于滑膜观测器时的关联参数数值是否均落入至参数的安全数值区间范围;
16、若为否,则判断滑膜观测器的滑膜面摆幅受外界干扰存在问题,且发送通知信息至负责人所持终端。
17、通过采用上述技术方案,进一步考虑到滑膜观测器在执行过程中存在高频抖动,从而导致电机出现机械磨损、噪声以及能耗的问题,此时可以由电机所存在的问题反向分析滑膜观测器的调控是否正常,并在不正常的时候可以及时通知负责人,以便于负责人及时了解情况并作具体处理。
18、可选的,还包括与判断滑膜观测器的滑膜面摆幅受外界干扰存在问题,且发送通知信息至负责人所持终端并行的步骤,具体如下:
19、分析具体未落入至参数的安全数值区间范围的参数,并获取相应参数在实际受控于滑膜观测器时的数值变化曲线;
20、根据所获取的在实际受控于滑膜观测器时的数值变化曲线,分析参数具体数值的变化率是否在预设变化率区间范围;
21、若为是,则发送通知信息至负责人所持终端;
22、若为否,则发送紧急通知信息至负责人所持终端。
23、通过采用上述技术方案,进一步考虑到针对电机所存在的问题,可以根据这些参数的数值以及时间线进一步分析问题的严重趋势,并根据严重趋势情况选择是否作紧急通知,尽量避免问题越来越严重。
24、可选的,还包括与执行调控方案并行的步骤,具体如下:
25、获取估算电流在预设时间范围内的变化频次;
26、若估算电流在预设时间范围内的变化频次超过预设变化频次,则判断滑膜观测器的滑膜面摆幅受外界干扰存在问题,且发送通知信息至负责人所持终端。
27、通过采用上述技术方案,进一步考虑到估算电流在预设时间内的变化过多,可能是存在滑膜观测器调控不佳的情况,在这个情况下,也可以及时通知负责人来处理。
28、可选的,还包括与执行调控方案并行的步骤,具体如下:
29、获取电机实际受控于滑膜观测器时的关联参数数值以及估算电流在预设时间范围内的变化频次,关联参数包括电机机械磨损、噪声以及能耗;
30、若存在电机实际受控于滑膜观测器时的关联参数数值未落入至参数的安全数值区间范围,且估算电流在预设时间范围内的变化频次超过预设变化频次,则发送紧急通知信息至负责人所持终端;
31、若存在电机实际受控于滑膜观测器时的关联参数数值未落入至参数的安全数值区间范围,或估算电流在预设时间范围内的变化频次超过预设变化频次,则发送通知信息至负责人所持终端。
32、通过采用上述技术方案,综合考虑滑膜观测器在执行过程中存在高频抖动从而导致电机出现机械磨损、噪声以及能耗的问题以及估算电流在预设时间内的变化过多,根据情况的发生情况确定具体的通知负责人模式,以便于负责人及时了解情况。
33、可选的,若存在电机实际受控于滑膜观测器时的关联参数数值未落入至参数的安全数值区间范围,或估算电流在预设时间范围内的变化频次超过预设变化频次,则发送通知信息至负责人所持终端包括:
34、根据未落入至参数的安全数值区间范围的关联参数数值所落入的区间范围与风险度的对应关系,分析确定未落入至参数的安全数值区间范围的关联参数数值所对应的风险度,同步获取估算电流在预设时间范围内的变化频次所落入的区间范围的风险度的对应关系,分析获取估算电流的风险度,累计获取风险度,获取的和作为有效风险度;
35、若有效风险度超过预设风险度,则发送紧急通知信息至负责人所持终端;
36、若有效风险度低于预设风险度,则发送通知信息至负责人所持终端。
37、通过采用上述技术方案,综合考虑电机出现机械磨损、噪声以及能耗的具体问题情况所对应的风险度以及估算电流在预设时间内的变化情况所对应的风险度,可以更加量化确认通知负责人的度,使通知负责人的方式更加符合实际需要。
38、可选的,负责人的获取包括:
39、分析通知信息是否为紧急通知信息;
40、若为是,则获取形成紧急通知信息的基础原因,其中,基础原因包括原因一以及原因二,原因一为存在电机实际受控于滑膜观测器时的关联参数数值未落入至参数的安全数值区间范围,原因二为估算电流在预设时间范围内的变化频次超过预设变化频次;
41、根据所获取的基础原因以及电机所处区域范围的所有相关工作人员关于基础原因所关联问题的处理成功率,分析获取相关工作人员关于本次问题的有效处理成功率,并选择其中处理成功率最高的工作人员作为本次负责人。
42、通过采用上述技术方案,可以有效分析处理人员针对本次通知信息的处理能力,并选择其中处理能力最强且在预设区间范围内处理人员作为本次负责人,可以最大程度提高问题的处理成功率。
43、可选的,还包括位于发送紧急通知信息至负责人所持终端之后的步骤,具体如下:
44、根据所分析获取的相关工作人员关于本次问题的有效处理成功率,分析超过预设成功率的相关工作人员,并构建交流群;
45、将电机实际受控于滑膜观测器时的关联参数数值以及获取估算电流在预设时间范围内的变化频次发送至构建交流群中,提醒所有非负责人外的相关工作人员发出处理意见;
46、根据所有相关工作人员发出处理意见的相同部分作为注意事项,并发送至负责人所持终端。
47、通过采用上述技术方案,通过对有效处理成功率超过预设成功率的工作人员的交流群构建,有利于汇集多个工作人员的智慧一起来思考注意事项,有利于具体处理人员加以注意。
48、第二方面,本技术提供一种滑膜观测器的滑膜面摆幅的调控系统,采用如下的技术方案:
49、一种滑膜观测器的滑膜面摆幅的调控系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现如第一方面所述的滑膜观测器的滑膜面摆幅的调控方法。
50、通过采用上述技术方案,通过程序的调取,滑膜面摆幅的取值会与当前电机施加的电压vq成正比,z在滑膜面上的摆幅会跟随vq变化,使得估算电流is* 的算法更符合电机等效模型,有效减小is*突变,从而减小估算电流is* 与采样电流is的差值ie。而ie又会影响下一次z的取值,使得z取值更准确,即观测器能更快的收敛,并且减小估算误差。
51、综上所述,本技术的有益技术效果为:
52、1.使滑膜观测器的估算电流更加接近实际电流,少误差,从而估算得到的反电动势值就越准确;
53、2.可以根据电机的问题以及估算电流的变化频次来确定滑膜观测器的调控是否存在问题,并在确定有问题的时候,可以及时通知到具体负责人。
- 还没有人留言评论。精彩留言会获得点赞!