负载供电电路和机器人的制作方法
本发明涉及电机控制,具体而言,涉及一种负载供电电路和机器人。
背景技术:
1、电机通常为机器人运动提供驱动力,如泳池清洁机器人一般需要电机作为动力来驱动水泵。然而在电机的运行过程中,存在一些问题:由于电机长期工作,电机的电路会内部产生电压/电动势的损耗,进而导致机器人的功率下降,效率变差;此外,机器人自身也会产生一些异常电压或电能,可能会对机器人的电路造成损害。
技术实现思路
1、为了解决上述技术问题,本申请实施例提供了一种负载供电电路和机器人。
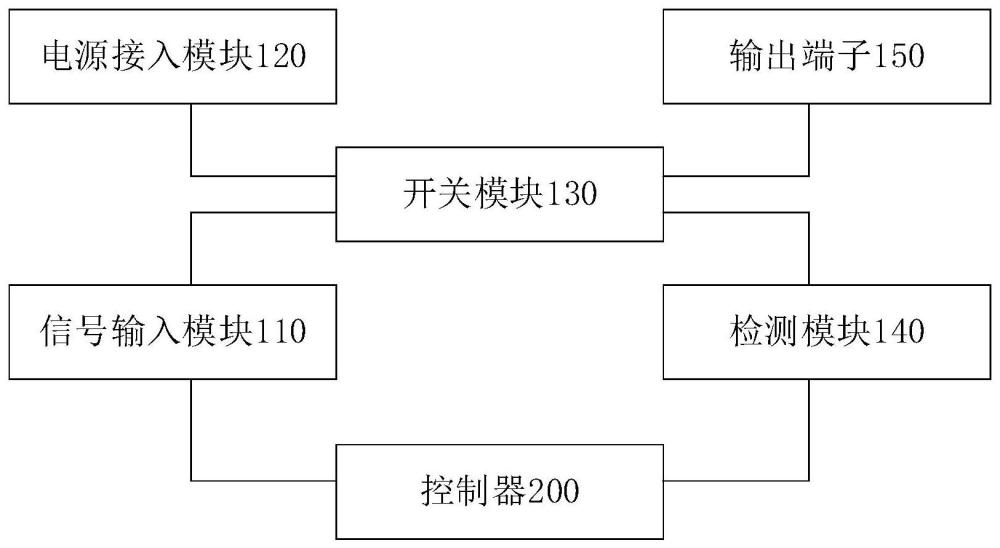
2、第一方面,本申请实施例提供了一种负载供电电路,应用于机器人,所述机器人包括驱动轮和负载,所述负载供电电路包括信号输入模块、电源接入模块、开关模块和输出端子;
3、所述信号输入模块的输入端与控制器电连接,所述信号输入模块的输入端用于接收所述控制器发送的控制信号,所述信号输入模块的输出端与所述开关模块的控制端电连接;
4、所述电源接入模块的输入端用于引入所述机器人驱动轮产生的感应电压,所述电源接入模块的输出端与所述开关模块的控制端电连接;
5、所述开关模块的第一输出端经由所述输出端子与所述负载电连接,所述感应电压控制所述开关模块导通以驱动所述负载消耗所述感应电压。
6、在一实施方式中,所述开关模块包括第一开关单元、第二开关单元和第三开关单元;
7、所述第一开关单元的控制端与所述电源接入模块的输出端电连接,所述第一开关单元的控制端还与所述信号输入模块的输出端电连接;
8、所述第一开关单元的输出端与所述第二开关单元的第一输入端电连接,所述第一开关单元的输入端与所述第二开关单元的控制端电连接,所述第一开关单元的输入端还与所述第二开关单元的第二输入端电连接;
9、所述第二开关单元的输出端与所述第三开关单元的控制端电连接,所述第二开关单元的输出端还与所述第三开关单元的输入端电连接;
10、所述第三开关单元的输出端与所述驱动轮电连接,所述第三开关单元的输入端与所述检测模块的测试端电连接。
11、在一实施方式中,所述第一开关单元包括第一三极管,所述第一三极管的基极作为所述第一开关单元的控制端,所述第一三极管的发射极作为所述第一开关单元的输出端,所述第一三极管的集电极作为所述第一开关单元的输入端。
12、在一实施方式中,所述第二开关单元包括第二三极管和第三三极管,所述第二三极管的基极作为所述第二开关单元的控制端,所述第二三极管的发射极作为所述第二开关单元的输出端,所述第二三极管的集电极作为所述第二开关单元的第一输入端;所述第三三极管的基极作为所述第二开关单元的控制端,所述第三三极管的发射极作为所述第二开关单元的输出端,所述第三三极管的集电极作为所述第二开关单元的第二输入端。
13、在一实施方式中,所述第三开关单元包括场效应管,所述场效应管的栅极作为所述第三开关单元的控制端,所述场效应管的源极作为所述第三开关单元的输入端,所述场效应管的漏极作为所述第三开关单元的输出端。
14、在一实施方式中,所述第三开关单元还包括储能子单元,所述储能子单元包括旁路电容和储能电容,所述旁路电容的第一端与所述储能电容的第一端电连接,所述储能电容的第一端与所述场效应管的漏极电连接,所述储能电容的第一端还与所述驱动轮电连接;
15、所述旁路电容的第二端与所述储能电容的第二端电连接,所述储能电容的第二端接地。
16、在一实施方式中,所述信号输入模块包括第四三极管,所述第四三极管的基极作为所述信号输入模块的输入端,所述第四三极管的集电极作为所述信号输入模块的输出端,所述第四三极管的发射极接地。
17、在一实施方式中,所述电源接入模块包括稳压管和第五三极管,所述稳压管的负极作为所述电源接入模块的输入端,所述稳压管的正极与所述第五三极管的基极电连接;
18、所述第五三极管的集电极作为所述电源接入模块的输出端,所述第五三极管的发射极接地。
19、在一实施方式中,所述检测模块包括运算放大器,所述运算放大器的正相输入端作为所述检测模块的测试端,所述运算放大器的反相输入端接地,所述运算放大器的输出端与所述控制器电连接。
20、第二方面,本申请实施例提供了一种机器人,所述机器人包括第一方面所述的负载供电电路。
21、上述本申请提供的负载供电电路,通过电源接入模块将机器人驱动轮产生的感应电压引入到负载,以使负载将感应电压耗散掉,避免对泳池清洁机器人的电路造成损害。本申请能够使机器人安全、稳定地工作。
技术特征:
1.一种负载供电电路,其特征在于,应用于机器人,所述机器人包括驱动轮和负载,所述负载供电电路包括信号输入模块、电源接入模块、开关模块和输出端子;
2.根据权利要求1所述的负载供电电路,其特征在于,所述负载供电电路还包括检测模块,所述检测模块包括运算放大器,所述运算放大器的正相输入端作为所述检测模块的测试端,所述运算放大器的反相输入端接地,所述运算放大器的输出端与所述控制器电连接。
3.根据权利要求2所述的负载供电电路,其特征在于,所述开关模块包括第一开关单元、第二开关单元和第三开关单元;
4.根据权利要求3所述的负载供电电路,其特征在于,所述第一开关单元包括第一三极管,所述第一三极管的基极作为所述第一开关单元的控制端,所述第一三极管的发射极作为所述第一开关单元的输出端,所述第一三极管的集电极作为所述第一开关单元的输入端。
5.根据权利要求3所述的负载供电电路,其特征在于,所述第二开关单元包括第二三极管和第三三极管,所述第二三极管的基极作为所述第二开关单元的控制端,所述第二三极管的发射极作为所述第二开关单元的输出端,所述第二三极管的集电极作为所述第二开关单元的第一输入端;所述第三三极管的基极作为所述第二开关单元的控制端,所述第三三极管的发射极作为所述第二开关单元的输出端,所述第三三极管的集电极作为所述第二开关单元的第二输入端。
6.根据权利要求3所述的负载供电电路,其特征在于,所述第三开关单元包括场效应管,所述场效应管的栅极作为所述第三开关单元的控制端,所述场效应管的源极作为所述第三开关单元的输入端,所述场效应管的漏极作为所述第三开关单元的输出端。
7.根据权利要求6所述的负载供电电路,其特征在于,所述第三开关单元还包括储能子单元,所述储能子单元包括旁路电容和储能电容,所述旁路电容的第一端与所述储能电容的第一端电连接,所述储能电容的第一端与所述场效应管的漏极电连接,所述储能电容的第一端还与所述驱动轮电连接;
8.根据权利要求1所述的负载供电电路,其特征在于,所述信号输入模块包括第四三极管,所述第四三极管的基极作为所述信号输入模块的输入端,所述第四三极管的集电极作为所述信号输入模块的输出端,所述第四三极管的发射极接地。
9.根据权利要求1所述的负载供电电路,其特征在于,所述电源接入模块包括稳压管和第五三极管,所述稳压管的负极作为所述电源接入模块的输入端,所述稳压管的正极与所述第五三极管的基极电连接;
10.一种机器人,其特征在于,所述机器人包括如权利要求1-9任一项所述的负载供电电路。
技术总结
本发明的实施例提供了一种负载供电电路和机器人,涉及电机控制技术领域。所述电路包括:负载供电电路包括信号输入模块、电源接入模块、开关模块和输出端子;信号输入模块的输入端与控制器电连接,信号输入模块的输入端用于接收控制器发送的控制信号,信号输入模块的输出端与开关模块的控制端电连接;电源接入模块的输入端用于引入机器人驱动轮产生的感应电压,电源接入模块的输出端与开关模块的控制端电连接;开关模块的第一输出端经由输出端子与负载电连接,感应电压控制开关模块导通以驱动负载消耗感应电压。本申请能够使电机更加安全、稳定地运行。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:深圳市优纪元科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!