直线感应电机三电平双矢量模型预测推力控制方法及系统
本发明属于直线电机控制,更具体地,涉及一种直线感应电机三电平双矢量模型预测推力控制方法及系统。
背景技术:
1、与旋转感应电机驱动轨道交通系统相比,直线感应电机无需齿轮箱等传动机构可直接产生直线运动,具有爬坡能力更强、转弯半径更小和截面积更小等优点,高度契合错综复杂的轨道交通网络发展需求。同时,随着轨道交通客流量的不断增加,新建线路多采用直流1500v供电方式,以满足更高功率等级的牵引电机需要。与两电平拓扑相比,三电平逆变器拓扑(以npc型三电平逆变器拓扑应用最为广泛)具有输出电压正弦度高、单个功率器件电压应力小、输出电流畸变率小等优点。因此,三电平变频驱动的直线感应电机牵引系统在轨道交通中具有广阔应用前景。
2、然而,因初级铁芯开断,直线感应电机面临严重端部效应,使得电机运行中互感变化剧烈并造成高速运行时推力衰减严重。模型预测推力控制将直接推力控制与模型预测控制相结合,以推力和初级磁链为控制目标,采用在线寻优的方式确定拟作用电压矢量,易于处理多目标约束条件,能有效缓解端部效应造成的推力衰减,同时保持直接推力控制所具有的快速动态响应能力,在直线感应电机驱动系统中具有巨大发展潜力。
3、由于在整个控制周期仅作用一个电压矢量,传统单矢量模型预测推力控制存在较大的推力波动和电流谐波。为进一步提升稳态性能,通常采用在每个控制周期内作用两个电压矢量的方式,即双矢量模型预测推力控制,实现在少量增加开关频率的情况下显著降低推力波动,相关方法已在两电平逆变器驱动的直线感应电机系统中得到应用。但上述方法直接应用于三电平逆变器时仍存在一定的困难。首先,三电平逆变器明显增加的离散电压矢量使得电压矢量组合的数量急剧增加。在不考虑简化的情况下,两电平逆变器仅存在49种双矢量组合,而三电平逆变器存在729种双矢量组合,难以采用已有方法确定最优电压矢量组合。其次,现有方法难以考虑三电平逆变器拓扑带来的固有控制要求,如中性点电压平衡和开关的平稳过渡。因此,尽管双矢量模型预测推力控制的核心思想是通用的,但现有方法难以有效扩展至三电平变频驱动的直线感应电机系统以实现稳态性能的提升。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种考虑电压矢量优化的直线感应电机三电平双矢量模型预测推力控制方法及系统,旨在解决现有双矢量模型预测推力控制应用于三电平变频驱动的直线感应电机系统时存在的算法复杂、三电平逆变器固有控制要求难以有效考虑等问题。
2、为实现上述目的,本发明提供了一种直线感应电机三电平双矢量模型预测推力控制方法,包括以下步骤:
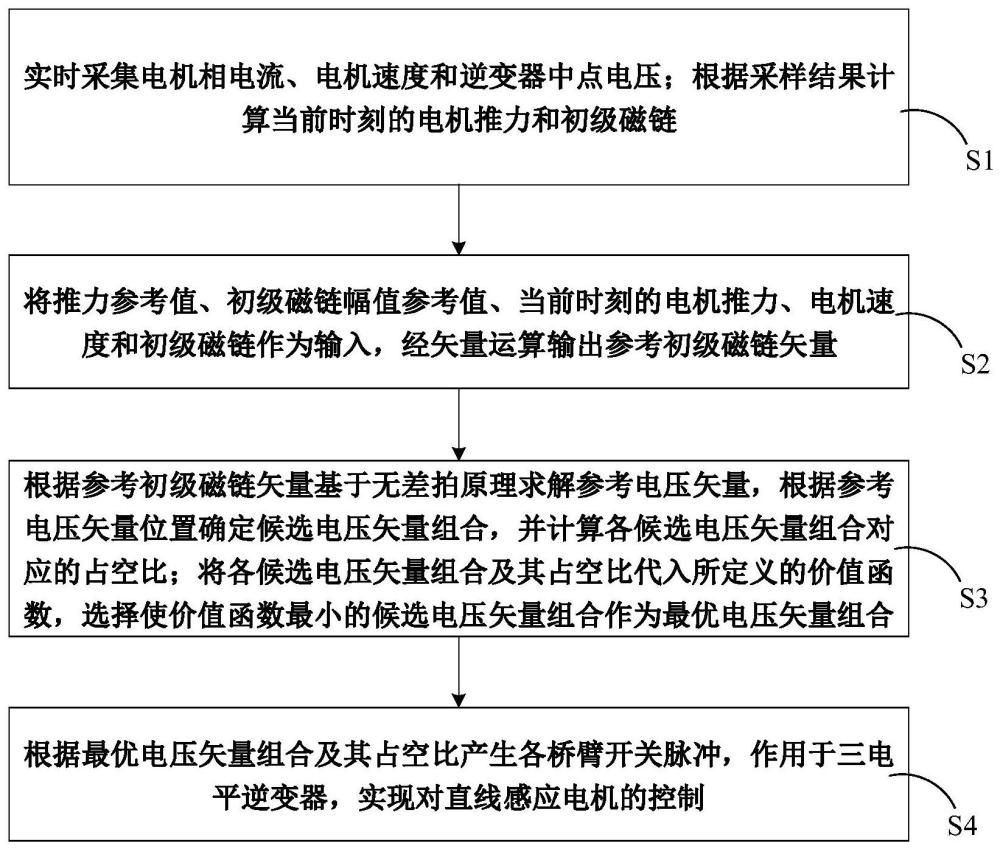
3、s1:实时采集中点箝位(neutral-point-clamped,npc)npc型三电平逆变器驱动的直线感应电机控制系统的状态参数,包括电机相电流、速度和逆变器中点电压;根据采样结果利用推力和磁链观测器计算当前时刻的电机推力和初级磁链;
4、s2:将速度控制器产生的推力参考值、初级磁链幅值参考值、当前时刻的电机推力、电机速度和初级磁链输入参考初级磁链矢量发生器,经参考初级磁链矢量发生器运算输出参考初级磁链矢量;
5、s3:根据参考初级磁链矢量求解参考电压矢量,根据参考电压矢量位置确定候选电压矢量组合,计算各候选电压矢量组合对应的占空比;将各候选电压矢量组合及其占空比代入所定义的价值函数,确定最优电压矢量组合;
6、s4:根据最优电压矢量组合及其占空比产生各桥臂开关脉冲,作用于三电平逆变器,实现对直线感应电机的控制。
7、进一步优选地,根据参考电压矢量位置确定候选电压矢量组合的方法,包括以下步骤:
8、将npc型三电平逆变器可产生的全部离散电压矢量按照幅值大小分为大矢量、中矢量、小矢量和零矢量;其中,大矢量幅值为2/3倍的udc;中矢量幅值为倍的udc;小矢量幅值为1/3倍的udc;udc为直流母线电压;
9、以6个中矢量为分界线,将逆变器输出电压平面划分为6个大扇区i~vi;其中,扇区i的角平分线方向定义为α轴方向,扇区ii和扇区iii的分界线方向定义为β轴方向;
10、以第i扇区为例,以u1α=udc/3和u1β=0为分界线,将第i扇区进一步划分为4个小区域:r1~r4;根据参考电压矢量的具体大小结合表1确定候选电压矢量组合,并计算各候选电压矢量组合对应的占空比;对于参考电压矢量处于其他扇区的情况,先通过坐标变换将其旋转至第i扇区,然后采用第i扇区中的条件判断所处区域,进而确定各自对应的候选电压矢量组合;
11、表1
12、
13、将各候选电压矢量组合及其占空比代入所定义的价值函数,确定最优电压矢量组合;
14、进一步优选地,针对候选电压矢量组合(ui,uj),综合推力、初级磁链、中点电压及开关状态切换约束的控制目标,所设计的价值函数形式为:
15、
16、其中,ku为权重系数,为考虑延时补偿后的中点电压预测值,dopt为候选电压矢量组合(ui,uj)对应的占空比,表达式为:
17、
18、hm为根据开关状态避免p、n状态直接切换的约束条件,表达式为:
19、
20、其中,sx(x将分别为a、b和c)表示x相的开关状态,分别用数字“1”、“0”和“-1”表示开关状态p、o和n;k和k+1分别代表k和k+1时刻。
21、另一方面,本发明提供了一种直线感应电机三电平双矢量模型预测推力控制系统,包括:
22、推力及初级磁链观测模块,用于根据电机相电流、速度和上一时刻计算的初级磁链,利用推力和磁链观测器计算电机当前时刻推力及初级磁链;
23、参考量转换模块,用于将速度控制器产生的推力参考值、初级磁链幅值参考值、当前时刻的电机推力、电机速度和初级磁链输入参考初级磁链矢量发生器,经运算输出参考初级磁链矢量,并进一步根据最优参考磁链矢量求解参考电压矢量;
24、最优电压矢量组合选择模块,用于根据参考电压矢量的位置确定候选电压矢量组合,并计算各组合对应的占空比,将候选电压矢量组合及其占空比分别代入所定义的价值函数,选择使价值函数最小的候选电压矢量组合作为最优电压矢量组合;
25、脉冲序列控制模块,用于根据最优电压矢量组合及其占空比产生三相桥臂脉冲并作用于npc型三电平逆变器相应桥臂,实现对直线感应电机的控制。
26、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
27、(1)本发明提供的直线感应电机三电平双矢量模型预测推力控制方法及系统,针对三电平逆变器提出新的电压矢量平面扇区划分方法及相应的简化搜索方法,能极大减少所需评价的电压矢量组合数量,有效降低双矢量模型预测推力控制在三电平变频驱动的直线感应电机系统中的实施复杂度;
28、(2)本发明提供的直线感应电机三电平双矢量模型预测推力控制方法及系统,通过分析不同电压矢量组合下的开关次数,利用冗余小矢量特点优化待评价电压矢量组合,有效降低了开关频率;并通过分析及数学推导,将中点电压平衡及电压矢量平滑切换等三电平逆变器固有控制需求包含在价值函数中,保证了系统的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!