一种含虚拟惯量控制的直驱风机惯量特性分析方法及系统与流程
本发明属于新能源发电,更具体地,涉及一种含虚拟惯量控制的直驱风机惯量特性分析方法及系统。
背景技术:
1、随着风电在电力系统中大规模并网,一些由高渗透率风电引起的问题引起了广泛关注,其中一个显著的问题就是电力系统的频率稳定问题。这是由于风机有功功率按照mppt曲线计算出的指令运行,且锁相环快速跟踪电网频率使得风机无法感知电网频率的变化。这些因素使得风机的转子动能被隐藏,不能像同步机一样自然而然的响应电网频率变化调整有功出力,其大规模降低系统惯性,增加频率失稳风险。目前有较多的虚拟惯量控制策略用于提升直驱风机的惯量响应能力,然而为了理清其惯量作用机理、评估风机的惯量响应能力以及便于风机虚拟惯量控制参数优化设计,准确分析参数变化时的含虚拟惯量控制直驱风机惯量特性是至关重要的。
2、现有的针对含虚拟惯量控制风机惯量特性分析方法可以分为数值计算法和模型分析法,数值计算法依靠风机并网端口的相量测量单元(pmu)实时获取风机在频率扰动时的有功和频率数据,依据转子运动方程或者其导数等其他形式,利用卡尔曼滤波等辨识算法求解得到风机的时变惯性时间常数,这种方法虽然能够直观的获取风机的惯量时间常数,但由于忽略了风机的内部控制结构,并不能直接用于分析参数变化时风机的惯量特性,且依赖于风机的实时运行数据,算法也比较复杂;模型分析法则从风机的模型结构出发探究风机的惯量特性,早期的研究一般在软件中建立含虚拟惯量控制直驱风机的详细模型,并采用仿真分析的方法进行简单的探索,然而这种方法缺乏机理层面的分析,也有将虚拟惯量控制的增益系数代表风机的惯性响应能力,但这是一种近似分析且忽略了风机惯性的时变特征,也并不能分析其他参数对风机惯性的贡献。
技术实现思路
1、针对现有技术的缺陷,本发明提供了一种含虚拟惯量控制的直驱风机惯量特性分析方法及系统,目的在于针对含虚拟惯量控制的直驱风机,表征时变惯量并分析不同参数下风机的惯量特性。
2、为实现上述目的,一方面,本发明提供了一种含虚拟惯量控制的直驱风机惯量特性分析方法,包括以下步骤:
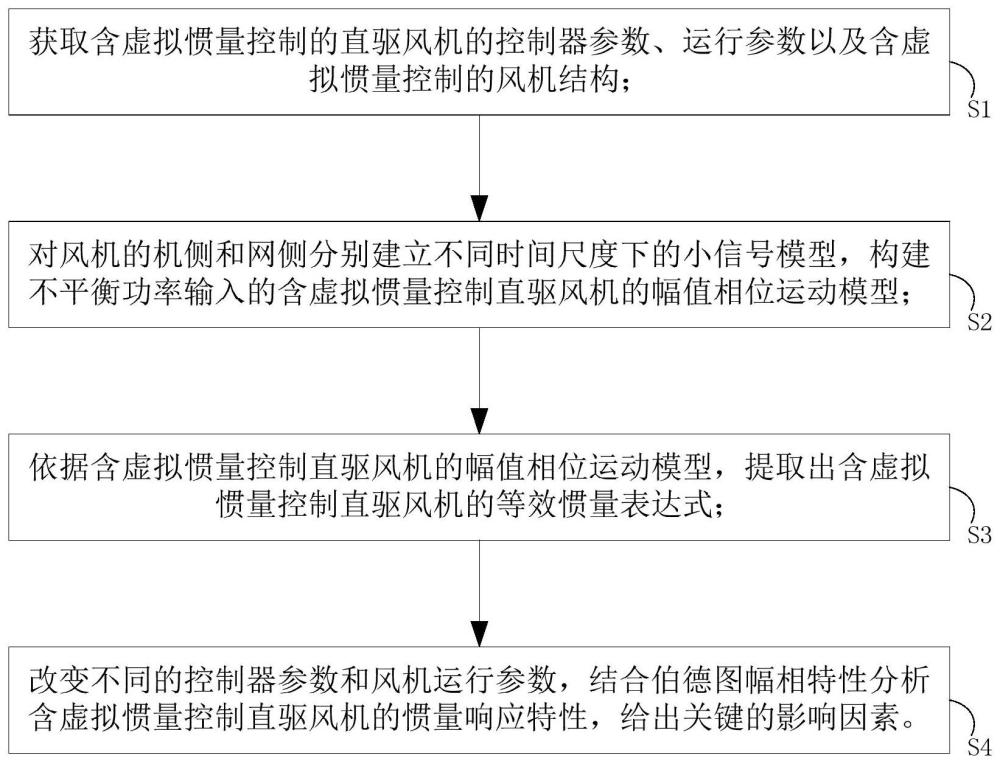
3、step1:基于含虚拟惯量控制的直驱风机的控制器参数、运行参数以及含虚拟惯量控制的风机结构,对风机的机侧变换器和网侧变换器分别建立不同时间尺度下的小信号模型,构建不平衡功率输入的含虚拟惯量控制直驱风机的幅值相位运动模型;
4、step2:根据含虚拟惯量控制直驱风机的幅值相位运动模型中的相位运动部分,提取出含虚拟惯量控制直驱风机的等效惯量表达式;
5、step3:基于含虚拟惯量控制直驱风机的等效惯量表达式,通过改变不同的控制器参数和风机运行参数,结合伯德图幅相特性分析含虚拟惯量控制直驱风机的惯量响应特性;其中,伯德图的幅值代表风机等效惯量时间常数的大小,伯德图的相位代表风机惯量响应速度。
6、进一步优选地,机侧变换器小信号模型包括:转速环控制器、虚拟惯量控制器以及mppt控制;网侧变换器小信号模型包括:直流电压控制器、无功功率控制器以及锁相环控制器。
7、进一步优选地,等效惯量表达式为:
8、
9、其中,k1、k2、k3、k4为从含虚拟惯量控制直驱风机的幅值相位运动模型中提取出的多环路控制参数以及风机运行参数相关的惯量系数;k1和k2与虚拟惯量控制器引起的耦合系数m(s)相关;
10、其中,耦合系数m(s)为:
11、
12、其中,c为直驱风机的直流侧电容的大小,udc0为直驱风机直流侧电容的稳态值,ut0为端电压的稳态值,e0为网侧变换器输出电压的稳态值,xf为滤波电感的大小;piv为直流电压控制器;pip为锁相环控制器;g(s)为直驱风机机侧变换器的功率传递函数;
13、惯量系数k1为:
14、
15、其中,ω1为电网频率的额定角速度;
16、惯量系数k2为:
17、
18、惯量系数k3为:
19、
20、惯量系数k4为:
21、
22、进一步优选地,step3具体为:
23、在不同运行参数下,改变转速环控制器的pi系数、虚拟惯量控制器的增益和滤波时间常数,绘制含虚拟惯量控制直驱风机的等效惯量表达式的伯德图,选取机电时间尺度的振荡频率,分析不同控制器参数下伯德图的幅相特性,获取影响惯量响应的运行参数和控制器参数。
24、进一步优选地,风机运行参数包括:额定功率、额定电网线电压、额定电网频率、直流母线电压、直流电容、风速、风机机械时间常数和mppt滤波时间常数;风机的控制器参数包括:速度控制器pi系数、直流电压控制器pi系数、锁相控制器系数、无功功率控制器参数和虚拟惯量控制参数。
25、第二方面,本发明提供了一种含虚拟惯量控制的直驱风机惯量特性分析系统,包括:
26、幅值相位运动模型的构建模块,用于基于含虚拟惯量控制的直驱风机的控制器参数、运行参数以及含虚拟惯量控制的风机结构,对风机的机侧变换器和网侧变换器分别建立不同时间尺度下的小信号模型,构建不平衡功率输入的含虚拟惯量控制直驱风机的幅值相位运动模型;
27、等效惯量表达式提取模块,用于根据含虚拟惯量控制直驱风机的幅值相位运动模型中的相位运动部分,提取出含虚拟惯量控制直驱风机的等效惯量表达式;
28、惯量响应特性分析模块,用于基于含虚拟惯量控制直驱风机的等效惯量表达式,通过改变不同的控制器参数和风机运行参数,结合伯德图幅相特性分析含虚拟惯量控制直驱风机的惯量响应特性;其中,伯德图的幅值代表风机等效惯量时间常数的大小,伯德图的相位代表风机惯量响应速度。
29、进一步优选地,幅值相位运动模型的构建模块中机侧变换器小信号模型包括:转速环控制器、虚拟惯量控制器以及mppt控制;网侧变换器小信号模型包括:直流电压控制器、无功功率控制器以及锁相环控制器。
30、进一步优选地,等效惯量表达式提取模块中等效惯量表达式为:
31、
32、其中,k1、k2、k3、k4为从含虚拟惯量控制直驱风机的幅值相位运动模型中提取出的多环路控制参数以及风机运行参数相关的惯量系数;k1和k2与虚拟惯量控制器引起的耦合系数m(s)相关;
33、其中,耦合系数m(s)为:
34、
35、其中,c为直驱风机的直流侧电容的大小,udc0为直驱风机直流侧电容的稳态值,ut0为端电压的稳态值,e0为网侧变换器输出电压的稳态值,xf为滤波电感的大小;piv为直流电压控制器;pip为锁相环控制器;g(s)为直驱风机机侧变换器的功率传递函数;
36、惯量系数k1为:
37、
38、其中,ω1为电网频率的额定角速度;
39、惯量系数k2为:
40、
41、惯量系数k3为:
42、
43、惯量系数k4为:
44、
45、进一步优选地,惯量响应特性分析模块中惯性响应特性的分析方法为:
46、在不同运行参数下,改变转速环控制器的pi系数、虚拟惯量控制器的增益和滤波时间常数,绘制含虚拟惯量控制直驱风机的等效惯量表达式的伯德图,选取机电时间尺度的振荡频率,分析不同控制器参数下伯德图的幅相特性,获取影响惯量响应的运行参数和控制器参数。
47、进一步优选地,幅值相位运动模型的构建模块中风机运行参数包括:额定功率、额定电网线电压、额定电网频率、直流母线电压、直流电容、风速、风机机械时间常数和mppt滤波时间常数;风机的控制器参数包括:速度控制器pi系数、直流电压控制器pi系数、锁相控制器系数、无功功率控制器参数和虚拟惯量控制参数。
48、第三方面,本发明提供一种电子设备,包括:至少一个存储器,用于存储程序;至少一个处理器,用于执行存储器存储的程序,当存储器存储的程序被执行时,处理器用于执行第一方面或第一方面的任一种进一步优选地所描述的方法。
49、第四方面,本发明提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,当计算机程序在处理器上运行时,使得处理器执行第一方面或第一方面的任一种进一步优选地所描述的方法。
50、第五方面,本发明提供一种计算机程序产品,当计算机程序产品在处理器上运行时,使得处理器执行第一方面或第一方面的任一种进一步优选地所描述的方法。
51、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
52、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
53、本发明提供了一种含虚拟惯量控制的直驱风机惯量特性分析方法及系统,其中,对风机的机侧变换器和网侧变换器分别建立不同时间尺度下的小信号模型,联合一起构建成含虚拟惯量控制直驱风机的幅值相位运动模型,因此,本发明构建的幅值相位运动模型具有清晰的物理过程和较好的可扩展性,即换用其他利用风机转子动能的控制策略时只需修改机侧部分的建模即可,基于幅值相位运动模型提取出含虚拟惯量控制直驱风机的等效惯量表达式,适用于不同的虚拟惯量控制方式下含虚拟惯量控制直驱风电机组惯量特性的分析。
54、本发明提供了一种含虚拟惯量控制的直驱风机惯量特性分析方法及系统,其中,基于含虚拟惯量控制直驱风机的等效惯量表达式,通过改变不同的控制器参数和风机运行参数,结合伯德图幅相特性分析含虚拟惯量控制直驱风机的惯量响应特性,从中可以看出,本发明可以用于分析不同风机运行参数时风机的惯量特性,为含有负载运行工况下的含虚拟惯量控制直驱风电场的惯量特性的评估奠定了基础,同时也可以分析不同控制器参数对虚拟惯量控制直驱风机等效惯量的影响程度以及影响趋势,为惯量控制参数的设计提供指导。
- 还没有人留言评论。精彩留言会获得点赞!