一种基于负荷功率跟踪的逆变器同步稳定控制方法与流程
本发明涉及微电网暂态稳定性分析与控制,主要涉及一种基于负荷功率跟踪的逆变器同步稳定控制方法。
背景技术:
1、微电网作为由分布式电源、储能设备、电力电子变换器和负载等组成的系统,在现代电力网络中越来越普及。其中,虚拟同步机控制策略(vsg)是一种通过在电力电子变换器的控制环节中引入类似于传统同步发电机的机电暂态方程来实现的控制策略。vsg不仅能够模拟同步发电机的有功调频、无功调压特性,而且具有惯性特性和阻尼特性等动态特性。在微电网或大电网受到扰动或发生故障时,vsg可以有效地进行频率和电压调节,以维持系统的稳定性。
2、然而,在逆变器所采用的虚拟同步机控制策略中,当遇到并网系统电压暂降时,会出现与传统同步发电机相似的同步功角稳定性问题。这是由于系统发生故障时,负荷功率随着电压的降低而减小,从而导致参考有功功率(对应于传统同步发电机的输入机械功率)与实际有功功率之间产生差异,这个差异被称为不平衡功率。不平衡功率的累积会导致虚拟转子的转速升高,并造成逆变器功角发生广泛的振荡,从而对系统的同步稳定性产生威胁。
3、因此,虚拟同步机控制策略在逆变器中的应用需要解决同步功角稳定性问题。
技术实现思路
1、为了解决现有技术所存在的上述问题,本申请提供了一种基于负荷功率跟踪的逆变器同步稳定控制方法。
2、本申请的技术方案如下:
3、一种基于负荷功率跟踪的逆变器同步稳定控制方法,包括:
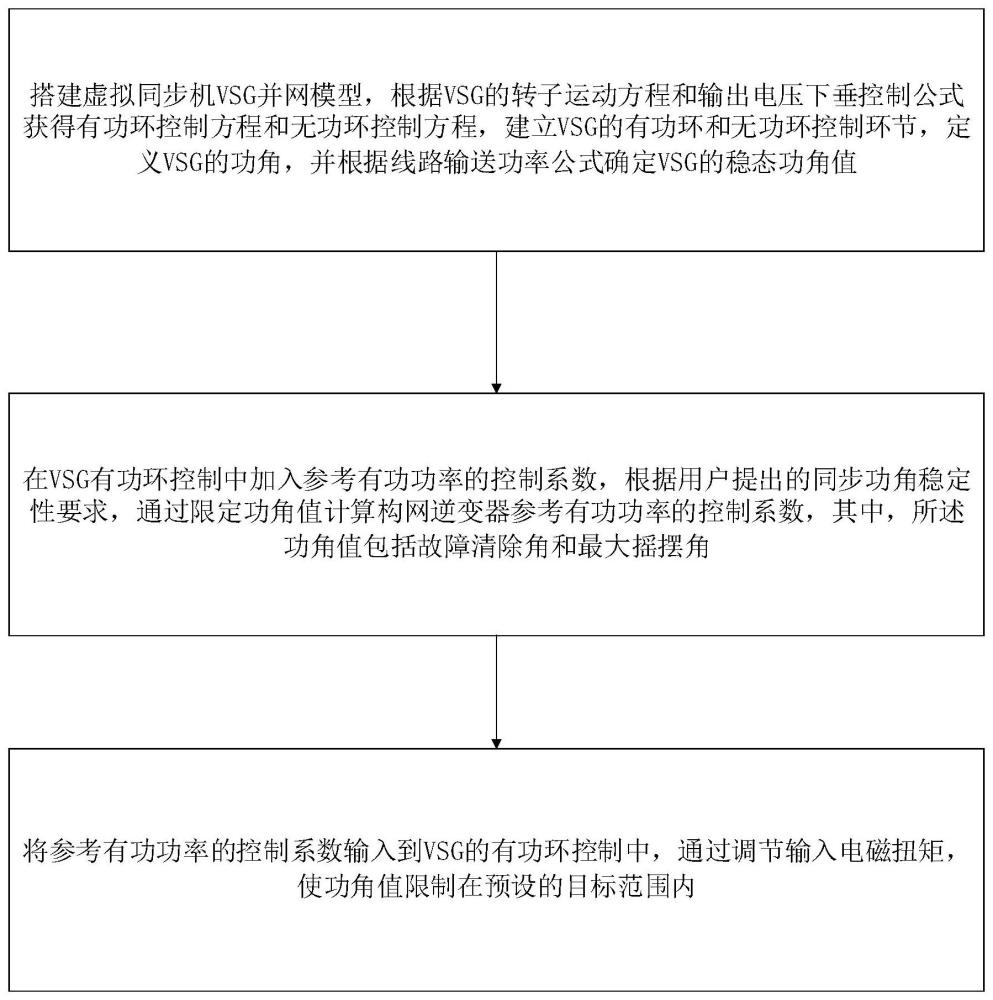
4、搭建虚拟同步机vsg并网模型,根据vsg的转子运动方程和输出电压下垂控制公式获得有功环控制方程和无功环控制方程,建立vsg的有功环和无功环控制环节,定义vsg的功角,并根据线路输送功率公式确定vsg的稳态功角值;
5、在vsg有功环控制中加入参考有功功率的控制系数k,根据用户提出的同步功角稳定性要求,通过限定功角值计算构网逆变器参考有功功率的控制系数,其中,所述功角值包括故障清除角δc和最大摇摆角δmax;
6、将参考有功功率的控制系数输入到vsg的有功环控制中,通过调节输入电磁扭矩,使功角值限制在预设的目标范围内。
7、优选的,有功环控制方程以公式表达为:
8、
9、式中,j为vsg的虚拟惯量;δ为vsg的功角;ω为vsg虚拟转子的角速度;pref为逆变器的参考有功功率;pe为逆变器输出的有功功率;ωn为基准角频率;d为阻尼系数。
10、优选的,无功环控制方程以公式表达为:
11、e=kq·(qref-qe)+un;
12、式中,e为逆变器输出端口电压幅值;kq为无功下垂系数;qref为逆变器参考无功功率;qe为逆变器输出无功功率;un为系统额定相电压幅值。
13、优选的,定义vsg的功角δ以公式表达为:
14、δ=θvsg-θg;
15、式中,θvsg为构网逆变器滤波后的输出电压相角,θg为系统电压相角;
16、所述线路输送功率公式以公式表达为:
17、
18、式中,x为vsg并网点与系统间的线路电抗值,ug为系统相电压幅值;
19、当稳态时,pref=pe,定义vsg的稳态功角为δa,以公式表达为:
20、
21、优选的,在vsg有功环控制中加入参考有功功率的控制系数k以公式表达为:
22、
23、式中,δp为不平衡功率;id为经派克变换后的vsg输出电流d轴分量。
24、优选的,预设故障从t=0时刻开始发生,用户确定电网故障持续时间tc,系统故障时的电压ug=ugf,限定故障清除角限定故障清除角后的vsg有功环控制方程以公式表达为:
25、
26、式中,pef为故障期间的负荷功率;
27、根据限定故障清除角后的vsg有功环控制方程,计算t=tc时刻的功角δ的特解,以公式表达为:
28、
29、将δ=δc代入特解中,迭代计算获得构网逆变器参考有功功率的控制系数k1。
30、优选的,基于拓展等面积定则限定最大摇摆角,以公式表达为:
31、
32、根据线路输送功率公式和限定的最大摇摆角计算构网逆变器参考有功功率的控制系数k2,以公式表达为:
33、
34、
35、式中,ωc为t=tc时刻的角频率值。
36、优选的,所述同步功角稳定性要求具体为控制系数能将逆变器遭遇故障时的故障清除角或最大摇摆角控制在所要求的范围内。
37、优选的,将参考有功功率的控制系数输入到vsg的有功环控制中,通过调节输入电磁扭矩,使功角值限制在预设的目标范围内,具体为限制故障清除角或限制最大摇摆角或限制故障清除角和最大摇摆角。
38、与现有技术相比,本发明的有益效果是:
39、1)本发明提供了一种基于负荷功率跟踪的逆变器同步稳定控制方法,通过搭建虚拟同步机vsg并网模型和控制逆变器的有功环和无功环控制环节,使逆变器输出的能够与电网的运行同步,使电力系统运行更加稳定;
40、2)本发明提供了一种基于负荷功率跟踪的逆变器同步稳定控制方法,在保证负荷功率传输的同时,提高控制系统的稳定性:通过控制系数限定故障清除角或最大摇摆角,保证电网故障发生后逆变器的控制能够将这一影响控制在一定的范围内,同时最大摇摆角的限制也可以有效减小系统的振荡;
41、3)本发明提供了一种基于负荷功率跟踪的逆变器同步稳定控制方法,优化逆变器输出质量:通过在无功控制中加入无功下垂系数,使逆变器的无功输出能够与电网同步变化;在有功控制中加入功率控制系数,使逆变器的有功输出能够按照需求变化。从而优化逆变器的输出质量,提高电力系统的运行效率。
技术特征:
1.一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,所述方法具体为:
2.根据权利要求1所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,有功环控制方程以公式表达为:
3.根据权利要求2所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,无功环控制方程以公式表达为:
4.根据权利要求3所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,定义vsg的功角δ以公式表达为:
5.根据权利要求4所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,在vsg有功环控制中加入参考有功功率的控制系数k以公式表达为:
6.根据权利要求5所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,预设故障从t=0时刻开始发生,用户确定电网故障持续时间tc,系统故障时的电压ug=ugf,限定故障清除角限定故障清除角后的vsg有功环控制方程以公式表达为:
7.根据权利要求6所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,基于拓展等面积定则限定最大摇摆角,以公式表达为:
8.根据权利要求1所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,所述同步功角稳定性要求具体为控制系数能将逆变器遭遇故障时的故障清除角或最大摇摆角控制在所要求的范围内。
9.根据权利要求1所述的一种基于负荷功率跟踪的逆变器同步稳定控制方法,其特征在于,将参考有功功率的控制系数输入到vsg的有功环控制中,通过调节输入电磁扭矩,使功角值限制在预设的目标范围内,具体为限制故障清除角或限制最大摇摆角或限制故障清除角和最大摇摆角。
技术总结
本发明为一种基于负荷功率跟踪的逆变器同步稳定控制方法,该方法结合了VSG的虚拟转子运动方程与拓展等面积定则进行推导分析,通过定量计算施加于有功环中的参考有功控制系数,得以按照用户需求控制VSG的故障清除角与最大摇摆角。本发明可以结合用户需求具体计算出控制所需的参数,并可将实际功角值控制在目标值范围内,实现了VSG同步功角稳定性的有效定量控制。
技术研发人员:梁富光,孙玉波,缪健锋,马忠强,涂承谦,曾振松,邓超平,郭茜婷,谢鸿,李虹,林伟芳,李艳蕾,苏捷
受保护的技术使用者:国网福建省电力有限公司宁德供电公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!