一种计及RoCoF的VSG自适应参数优化控制方法
本发明涉及虚拟同步机控制,尤其是涉及的是一种计及rocof的vsg自适应参数优化控制方法。
背景技术:
1、光伏、风电等清洁能源的应用已经成为未来电力系统发展的重要趋势。新能源发电并网时需采用大量电力电子装置,电网系统的整体惯量水平会降低,影响系统的稳定性,呈现“弱惯量、弱阻尼”特点。虚拟同步发电机作为一种构网型的逆变器策略,可通过向微电网提供惯性和阻尼来提高系统的稳定性,但调频过程中过大的rocof可能触发微网保护,导致微电网切机减载,影响微网运行和响应系统调度。
2、对于vsg系统,内环控制器负责追踪和校正外环控制器的输出信号,以提高系统的响应速度和抗干扰能力,通过闭环控制结构虽然可以实现更精确和稳定的输出,但也导致了实际输出电压的角频率变化与外环调整的参考电压角频率存在一定差异,需要提高内环的动态性能。
3、vsg呈现的电压源特性,也需要提高动态性能使其具备更强的强电网适应性,避免在调频以及强网运行时的非线性干扰对系统的性能和可靠性产生负面影响。
技术实现思路
1、本发明的其他特征和优点将在随后的说明书中阐述,并且部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及其他说明书附图中所特别指出的结构来实现和获得。
2、本发明的目的在于克服上述不足,提供一种计及rocof的vsg自适应参数优化控制方法,该方法相比于传统的自适应策略,能限制rocof的变化幅度,提高系统的频率稳定性和动态调节能力,确保系统在安全的频率和rocof变化范围内稳定运行,在短路比更高的强电网下表现出更强的鲁棒性。
3、本发明提供一种计及rocof的vsg自适应参数优化控制方法,包括:
4、s1、建立基于vsg控制的逆变器模型,将虚拟转动惯量 j和阻尼系数 d引入到逆变器模型中,根据vsg转子运动方程以及有功-频率下垂控制传递函数的关系,推导出vsg功频控制的方程;
5、s2、根据vsg的输入输出功率,建立vsg控制逆变器模型的二阶传递函数 g( s),选取稳态时虚拟转动惯量 j和阻尼系数 d的变化范围;
6、s3、求解当vsg控制逆变器模型稳定时,虚拟转动惯量 j和阻尼系数 d之间的约束关系,得出有关虚拟转动惯量 j和阻尼系数 d的随动方程;
7、s4、选取稳态时有关虚拟转动惯量 j和阻尼系数 d的随动方程,对逆变器模型中实际电压的rocof和频率偏差进行采样计算,代入改进参数自适应策略,得到自适应后的虚拟转动惯量 j和阻尼系数 d;
8、s5、通过自适应参数调整后,功率环得到参考内电势,经过虚拟阻抗模块和改进后的自适应滑模内环得到svpwm的调制波。
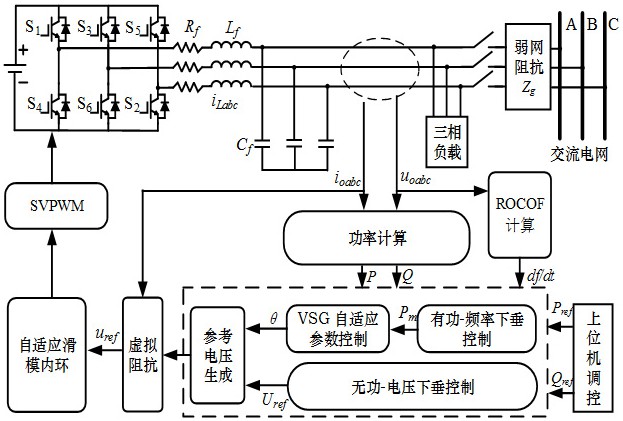
9、在一些实施例中,在s1步骤中,该基于vsg控制的逆变器模型包括上位机调控模块、功率计算模块、vsg控制模块、rocof计算模块、虚拟阻抗模块和自适应滑模内环模块,该上位机调控模块、该vsg控制模块、该虚拟阻抗模块和该自适应滑模内环模块顺序连接,该自适应滑模内环模块输出端与该逆变器连接,该逆变器通过输电线路与交流电网连接;
10、该上位机调控模块向该vsg控制模块中输入设定的有功参考功率和无功参考功率 q ref ;
11、该功率计算模块实时采集该逆变器模型中的有功功率p和无功功率q,并将得到的数值输入至该vsg控制模块中;
12、该rocof计算模块实时采集该逆变器模型中的rocof值和频率偏差,并将得到的数值输入至该vsg控制模块中;
13、该虚拟阻抗模块模拟逆变器内阻使该vsg控制模块中生成的参考内电势成为逆变器的参考输出电压,通过该自适应滑模内环模块后得到svpwm的调制波。
14、在一些实施例中,在s1步骤中,该vsg控制模块中采用有功-频率下垂控制策略,有功-频率下垂控制传递函数如下:
15、,
16、其中,为机械功率,为有功参考功率,为有功功率下垂系数,为有功频率的参考值,为vsg产生的角频率;
17、根据vsg转子运动方程以及有功-频率下垂控制传递函数的关系,推导出vsg功频控制的方程:
18、,
19、其中,为输出电磁功率, j为转动惯量, d为阻尼系数,为vsg产生的角频率,为vsg角频率的参考值,为转动惯量j与角频率的乘积,是vsg产生的角频率对时间的导数,即角频率变化率。
20、在一些实施例中,在s2步骤中,根据vsg的输入输出功率,vsg控制逆变器模型的二阶传递函数 g( s)为:
21、,
22、其中,u为电网相电压有效值,u=220v,e为逆变器内电势,e=240v,z为虚拟阻抗,,u、e、z为实际已知或自设参数,s为拉普拉斯变换的复变量。
23、根据权利要求4所述的计及rocof的vsg自适应参数优化控制方法,其特征在于,在s2步骤中,二阶传递函数 g( s)对应典型二阶模型的自然振荡角频率、阻尼比为:
24、,
25、由于期望在调频过程中,二阶模型工作在的欠阻尼状态,取误差带为±2%,通过参数数值及自然振荡角频率的变化范围确定固定惯量、阻尼以及 j、 d的变化范围。
26、在一些实施例中,在s2步骤中,二阶传递函数 g( s)对应典型二阶模型的超调量和调节时间为:
27、。
28、在一些实施例中,在s3步骤中,由于期望在调频过程中二阶模型可以工作在的欠阻尼状态,因此根据二阶传递函数 g( s)得到转动惯量 j与阻尼系数 d之间的关系约束式为:
29、。
30、在一些实施例中,在s4步骤中,改进参数自适应策略的传递函数为:
31、,
32、其中,为vsg稳定运行时的值, kj和 ks为参数变化的阈值,用以防止微小的高频频率波动引起的参数变化; rcf为rocof的测量值,需要进行限幅使其小于;为rocof期望的变化范围,取1hz/s;为功率环产生的角速度偏差值,需要进行限幅使其小于,为期望的频率变化范围,取0.2hz; d中的1.4为选取时根据 d的关系约束式求得的系数, d中的1.6为选取时根据 d的关系约束式求得的系数。
33、在一些实施例中,在s5步骤中,自适应滑模内环其控制律为:
34、,
35、其中,,为电路中的滤波电感,为电路中的滤波电容,为电路中的寄生电阻,为大于零的自适应系数且有上下界,取为的估计值,为逆变器输出电压,为vsg生成的电压参考值,是电压滑模控制器的滑模变量,是逆变系统结构对参考输出电压的影响,为电路中的输出电流,和为大于0的滑模面系数,为跟随滑模面变化的函数且大于|z|,表示滑模切换函数增益。
36、在一些实施例中,在s5步骤中,将自适应滑模内环生成的三相电压送入svpwm得出脉冲调制,送入逆变器。
37、通过采用上述的技术方案,本发明的有益效果是:
38、本发明的自适应参数优化控制方法相比于传统的自适应策略,能限制rocof的变化幅度,提高系统的频率稳定性和动态调节能力,确保系统在安全的频率和rocof变化范围内稳定运行,在短路比更高的强电网下表现出更强的鲁棒性。
39、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
40、无疑的,本发明的此类目的与其他目的在下文以多种附图与绘图来描述的较佳实施例细节说明后将变为更加显见。
41、为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举一个或数个较佳实施例,并配合所示附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!