一种快速终端滑模控制方法、装置、系统及存储介质
本发明涉及一种快速终端滑模控制方法、装置、系统及存储介质,属于电力电子变换器。
背景技术:
1、近年来,dc-dc变换器广泛应用于工业、医疗、电力系统等诸多领域。dc-dc变换器作为一种功率转换装置,主要作用是调节电源侧和负载侧之间的电压,来满足不同的用电需求。其中,升降压变换器既有升高电源侧和负载之间电压的作用,又有降低电源侧和负载之间电压的作用,结构简单,相比降压和升压变换器,功能更加广泛。然而,在现代电力系统中,为了满足实际需求,往往需要多个dc-dc变换器级联,导致了恒功率负载现象。恒功率负载的负阻抗特性会降低系统阻尼,严重影响电力系统的稳定性。
2、目前,针对含恒功率负载的升降压变换器已有许多控制策略,比如,基于无源控制理论,通过构造期望的能量函数,使系统在平衡点渐进稳定,但是该方法在应用于升降压系统时控制器非常复杂,不利于实际使用;另外,通过增加系统阻尼的控制策略来抵消恒功率负载的负阻抗产生的不利影响,使系统渐进稳定;滑模控制由于设计简单、与系统的参数和扰动无关、易于实现等优点,被多次应用于dc-dc变换器系统,但是线性滑模面的收敛速度慢,在平衡点处渐进收敛,并且由于切换函数的存在,系统的抖震非常严重。
3、现有的控制策略仅仅保证了闭环系统在平衡点渐进收敛,并且需要大量的传感器,一旦传感器发生故障,控制策略将无法实现,降低了系统的可靠性。
技术实现思路
1、本发明的目的在于提供一种快速终端滑模控制方法、装置、系统及存储介质,能够使含恒功率负载升降压变换器的输出电压在有限时间内到达平衡点,并且减少传感器的使用。
2、为达到上述目的,本发明提供如下技术方案:
3、第一方面,本发明提供一种快速终端滑模控制方法,包括:
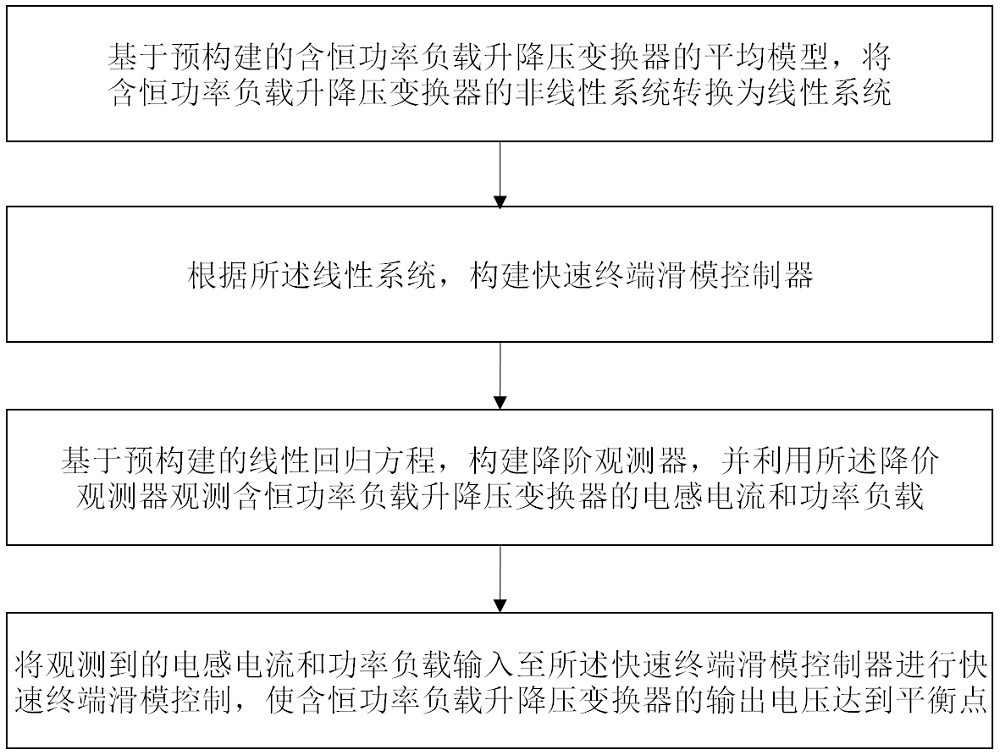
4、利用预构建的降阶观测器观测含恒功率负载升降压变换器的电感电流和功率负载;
5、将观测到的电感电流和功率负载输入至预构建的快速终端滑模控制器进行快速终端滑模控制,使含恒功率负载升降压变换器的输出电压到达平衡点;
6、其中,所述快速终端滑模控制器是基于预构建的含恒功率负载升降压变换器的平均模型,将含恒功率负载升降压变换器的非线性系统转换为线性系统,根据所述线性系统构建的;
7、所述降阶观测器是根据预构建的线性回归方程构建的。
8、结合第一方面,进一步的,含恒功率负载升降压变换器的平均模型为:
9、;
10、其中,为含恒功率负载升降压变换器的电感电流,为含恒功率负载升降压变换器的输出电压,、为、的一阶导数,为含恒功率负载升降压变换器的电感,为含恒功率负载升降压变换器的电容,为含恒功率负载升降压变换器的输入电压,为含恒功率负载升降压变换器的电感寄生电阻,为含恒功率负载升降压变换器的恒功率负载,为含恒功率负载升降压变换器的开关管控制信号的占空比。
11、结合第一方面,进一步的,将含恒功率负载升降压变换器的非线性系统转换为线性系统包括:
12、定义含恒功率负载升降压变换器的输出为,其中,为含恒功率负载升降压变换器的电感电流,为含恒功率负载升降压变换器的输出电压,为含恒功率负载升降压变换器的电感,为含恒功率负载升降压变换器的电容,为含恒功率负载升降压变换器的输入电压,则含恒功率负载升降压变换器的输出关于时间的一阶导数为:
13、;
14、其中,为含恒功率负载升降压变换器的电感寄生电阻,为含恒功率负载升降压变换器的恒功率负载;
15、含恒功率负载升降压变换器的输出关于时间的二阶导数为:
16、;
17、其中,为含恒功率负载升降压变换器的开关管控制信号的占空比;
18、定义含恒功率负载升降压变换器的电感电流、输出电压的平衡点为、,定义含恒功率负载升降压变换器的输出的平衡点为,定义坐标变换为,,,其中,为与的误差,为的一阶导数,为控制律,则线性系统为:
19、;
20、其中,、为、的一阶导数。
21、结合第一方面,进一步的,所述快速终端滑模控制器为:
22、;
23、其中,为滑模面,为控制律,为与的误差,为的一阶导数,其中,为含恒功率负载升降压变换器的输出,为的平衡点,、、、为任意正数,、、、为任意奇整数,,。
24、结合第一方面,进一步的,所述线性回归方程是基于改写后的平均模型将状态观测转换为参数估计并进行动态扩展描述后推导获取的,改写后的平均模型为:
25、;
26、其中,为含恒功率负载升降压变换器的电感电流,为的一阶导数,表示含恒功率负载升降压变换器的输出电压,为的一阶导数,为相关常量,,为不相关变量,,为相关变量,,为相关变量,,其中,为含恒功率负载升降压变换器的电感,为含恒功率负载升降压变换器的电容,为含恒功率负载升降压变换器的输入电压,为含恒功率负载升降压变换器的电感寄生电阻,为含恒功率负载升降压变换器的开关管控制信号的占空比,表示含恒功率负载升降压变换器的恒功率负载;
27、将状态观测转换为参数估计为:
28、;
29、其中,为的重构状态,为状态转移矩阵,为和的初始值误差;
30、动态扩展描述为:
31、;
32、其中,、为第一、二中间变量,、、、为、、、的一阶导数,为原观测器增益,为的初始值,为的初始值,为的初始值,为的初始值;
33、线性回归方程为:
34、;
35、其中,为可测变量,,为未知参数向量,。
36、结合第一方面,进一步的,根据预构建的线性回归方程构建降阶观测器包括:
37、定义滤波器为,其中,为滤波器,为频域变量,、为滤波器参数,利用滤波器对所述线性回归方程进行扩展为:
38、;
39、其中,为扩展后的回归因子,为扩展后的可测变量,为滤波器向量,,、为滤波器,为第一中间变量,为可测变量;
40、则降阶观测器为:
41、;
42、其中,、、、为第三、四、五、六中间变量,、、、为、、、的一阶导数,为原观测器增益,为降阶观测器增益,为的行列式,为的伴随矩阵,为的初始值,为的初始值,为的初始值;
43、利用所述降阶观测器观测含恒功率负载升降压变换器的电感电流和功率负载,当时间常数时,,其中,为滑模面,为的行列式,为含恒功率负载升降压变换器的开关管控制信号的占空比,定义函数,其中,为常数,,则含恒功率负载升降压变换器的电感电流和功率负载被观测为:
44、;
45、其中,为含恒功率负载升降压变换器的电感电流,为含恒功率负载升降压变换器的恒功率负载,表示含恒功率负载升降压变换器的恒功率负载,、、为、、的观测值,为的重构状态,为状态转移矩阵,为和的初始值误差,为的观测值,为的初始值,为的初始值。
46、结合第一方面,进一步的,所述快速终端滑模控制为:
47、;
48、其中,为含恒功率负载升降压变换器的电感电流,为含恒功率负载升降压变换器的输出电压,为含恒功率负载升降压变换器的电感,为含恒功率负载升降压变换器的电容,为含恒功率负载升降压变换器的输入电压,为含恒功率负载升降压变换器的电感寄生电阻,为含恒功率负载升降压变换器的恒功率负载,为含恒功率负载升降压变换器的开关管控制信号的占空比,为滑模面,为控制律,为与的误差,为的一阶导数,其中,为含恒功率负载升降压变换器的输出,为的平衡点,、、、为任意正数,、、、为任意奇整数,,,、为、的平衡点,、、、、、、为、、、、、、的观测值。
49、第二方面,本发明提供一种快速终端滑模控制装置,包括:
50、观测模块:用于利用预构建的降阶观测器观测含恒功率负载升降压变换器的电感电流和功率负载;
51、控制模块:用于将观测到的电感电流和功率负载输入至预构建的快速终端滑模控制器进行快速终端滑模控制,使含恒功率负载升降压变换器的输出电压到达平衡点;
52、其中,所述快速终端滑模控制器是基于预构建的含恒功率负载升降压变换器的平均模型,将含恒功率负载升降压变换器的非线性系统转换为线性系统,根据所述线性系统构建的;
53、所述降阶观测器是根据预构建的线性回归方程构建的。
54、第三方面,本发明提供一种快速终端滑模控制系统,包括处理器及存储介质;
55、所述存储介质用于存储指令;
56、所述处理器用于根据所述指令进行操作以执行根据第一方面任一项所述方法的步骤。
57、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面任一项所述方法的步骤。
58、与现有技术相比,本发明的有益效果是:
59、对比现有的控制策略仅仅保证系统渐进收敛的局限,本发明提供的快速终端滑模控制方法能够保证闭环系统在有限时间内收敛,具有收敛速度快、抗干扰能力强、鲁棒性好等优点。对比现有的要求全信息的控制器,本发明提供的快速终端滑模控制方法仅仅只需要电压信息就能够同时得到电感电流和功率负载信息,能够减少传感器的使用,节约成本,降低系统故障率,提高系统稳定性。另外,本发明提供的快速终端滑模控制方法在功率负载和参考电压突变的情况下依然有良好的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!