一种高精度电机驱动方法与流程
本发明涉及电机驱动领域,且更具体地涉及一种高精度电机驱动方法。
背景技术:
1、随着现代电子技术的快速发展和生产效率的不断提高,电机驱动系统的应用越来越广泛,然而,在电机驱动的过程中,由于传动链结构复杂、传动力矩受到影响等因素,可能会使得电机驱动过程中出现误差,从而影响其精度和可靠性。传统的电机控制方法往往只能实现对电机的基本控制,如启停、正反转等,而无法满足对电机运行精度和效率的要求。高精度电机驱动方法已经成为了工业自动化、航空航天、机器人等领域中不可或缺的技术手段。
2、传统的电机控制方法需要大量的手动调整和优化,对于不同的电机系统需要不同的控制参数,增加了维护成本。现有的电机控制方法采用开环控制,容易受到外部环境和干扰的影响,控制精度不高。传统的电机控制方法通常依赖于稳态解析,即根据电机的稳态模型进行控制,无法考虑电机系统的实时变化和非线性特性。传统的电机驱动方法的通讯技术和数据处理能力较低,无法实现远程控制和实时监测,运行效率和效果不理想。传统的电机控制方法无法实现与其他设备的联动控制,无法实现智能化的自动化控制。
3、因此,本发明公开了一种高精度电机驱动方法,结合物联网平台、机器学习和无线传感器网络,实现对电机驱动的智能化控制,具有高实时性和准确性。
技术实现思路
1、针对现有技术的不足,本发明公开了一种高精度电机驱动方法,结合物联网平台、机器学习和无线传感器网络,实现对电机驱动的智能化控制,具有高实时性和准确性。通过无线传感器网络实时采集电机运行参数,包括电机的转速、转角、转矩、加速度、电流和电压等。相较于传统方法只能采集少量关键参数,该方法可以获取更为全面的电机性能数据,从而提高了精度;通过自监督表征学习方法判断当前电机运行状态,具有更强的智能化和自适应性;利用增量式自适应预测控制算法构建高精度电机驱动模型。与传统的pid控制相比,该算法具有更好的鲁棒性和追踪性能,在不同负载条件下都能够保持较好的控制效果;采用闭环控制模型对电机的运行进行实时调整和优化,包括位置控制单元、速度控制单元、力矩控制单元和反馈控制单元。这些单元相互协作,能够更加精确地控制电机的运行状态,提高了驱动精度;提供了远程可视化控制平台,可以方便地对电机进行远程控制和监测。这种方式可以极大地方便用户的使用,并且能够及时获取电机性能数据,保证了设备的稳定运行;自动化、智能化程度高。
2、本发明采用以下技术方案:
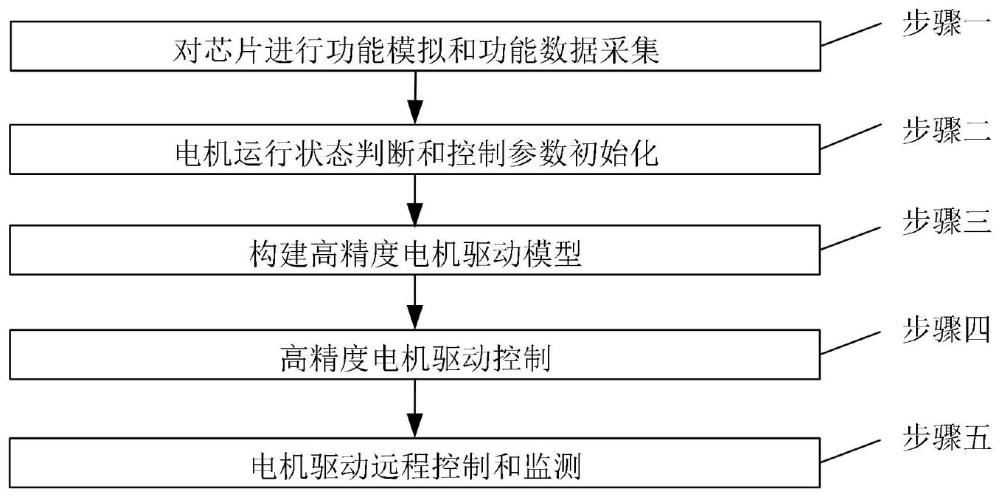
3、一种高精度电机驱动方法,包括以下步骤:
4、步骤一、检测电机类型和实时运行参数;
5、通过无线传感器网络实时采集电机运行参数,并基于电机运行电流和电压识别电机类型,所述电机运行参数至少包括电机的转速、转角、转矩、加速度、电流和电压,所述无线传感器网络包括磁角度编码器、超声波测距仪和霍尔效应传感器,所述电机运行参数通过控制器区域网络传输至物联网平台进行存储、分析和处理;
6、步骤二、电机运行状态判断和控制参数初始化;
7、所述物联网平台通过自监督表征学习方法判断当前电机运行状态,并根据电机类型、所述当前电机运行状态和实时运行参数初始化控制参数,所述当前电机运行状态包括起动、加速、减速和停止;
8、步骤三、构建高精度电机驱动模型;
9、所述物联网平台通过机器学习引擎构建所述高精度电机驱动模型,所述机器学习引擎包括特征提取模块、模型构建模块、模型训练模块、模型优化模块和模型运行模块,所述特征提取模块的输出端与所述模型构建模块的输入端连接,所述模型构建模块的输出端与所述模型训练模块的输入端连接,所述模型训练模块的输出端与所述模型优化模块的输入端连接,所述模型优化模块的输出端与所述模型运行模块的输入端连接;
10、步骤四、高精度电机驱动控制;
11、采用所述高精度电机驱动模型和初始化控制参数对电机进行驱动控制,并采用闭环控制模型对电机的运行进行实时调整和优化,所述闭环控制模型包括位置控制单元、速度控制单元、力矩控制单元和反馈控制单元,所述位置控制单元、速度控制单元和力矩控制单元与所述反馈控制单元进行双向连接;
12、步骤五、电机驱动远程控制和监测,通过远程可视化控制平台进行电机驱动远程控制和监测。
13、作为本发明进一步的技术方案,所述自监督表征学习方法包括输入层、卷积层、池化层、自适应参数调节层、全连接层、时间序列层、隐藏层和输出层,所述自监督表征学习方法包括以下步骤:
14、s1、通过所述输入层接收实时所述电机运行参数,并对输入数据进行清洗和归一化处理操作;
15、s2、通过所述卷积层对输入数据进行卷积运算,并通过所述池化层对所述卷积层的输出数据进行降维处理,所述卷积层通过卷积核提取数据特征,所述池化层通过降采样方式压缩计算量;
16、s3、所述自适应参数调节层根据电机实时运行参数动态地调节判断的参数和权重;
17、s5、通过所述全连接层将池化后的特征进行深度提取,所述全连接层采用标准神经网络对输入向量进行加权和求和运算;
18、s6、通过所述时间序列层将电机运行参数转化为时间序列数据,所述时间序列层通过长短句时间序列模型lstm捕捉特征的时间相关性;
19、s7、通过所述隐藏层进行特征的非线性映射,所述隐藏层通过自编码器、对比学习和预训练网络进行特征学习;
20、s8、通过所述输出层将经过隐藏层处理后的结果进行分类或回归操作,并对当前电机的运行状态判断结果进行输出。
21、作为本发明进一步的技术方案,所述特征提取模块采用数字信号处理器提取电机运行特征,所述电机运行特征包括频率特征、振幅特征和功率谱特征,所述模型构建模块基于增量式自适应预测控制算法构建所述高精度电机驱动模型,所述模型训练模块基于训练样本数据和历史数据训练所述高精度电机驱动模型,所述模型优化模块通过反馈机制和在线学习方式优化所述高精度电机驱动模型,所述模型运行模块通过将训练好的电机驱动模型部署至所述物联网平台进行控制指令输出。
22、作为本发明进一步的技术方案,所述增量式自适应预测控制算法的工作方法包括以下步骤:
23、步骤1、输入初始电机运行状态向量x(0)、初始化控制参数向量u(0)以及初始状态估计误差协方差矩阵p(0),所述初始状态估计误差协方差矩阵p(0)的输出函数公式为:
24、
25、在公式(1)中,x(0)为初始电机运行状态向量,为初始电机运行状态向量的估计值,e为初始电机运行状态向量期望值,^t表示矩阵的转置运算;
26、步骤2、根据k时刻的电机运行状态向量x(k)、k时刻的控制参数向量u(k)和状态方程,计算k+1时刻预测电机运行状态向量x(k+1),状态方程表示为:
27、
28、在公式(2)中,x(k+1)为k+1时刻预测电机运行状态向量,x(k)为电机运行状态向量,u(k)为控制参数向量,w(k)为过程噪声,a为电机运行状态向量预测权重矩阵,b为控制参数向量预测权重矩阵,g为过程噪声系数矩阵;
29、步骤3、根据k+1时刻测量方程和电机运行状态测量向量y(k+1),更新k+1时刻电机运行状态向量x'(k+1)和k+1时刻状态估计误差协方差矩阵p(k+1),测量方程表示为:
30、
31、在公式(3)中,x'(k+1)为k+1时刻电机运行状态更新向量,v(k+1)为k+1时刻测量噪声,p(k+1)为k+1时刻状态估计误差协方差矩阵,c为k+1时刻电机运行状态向量更新矩阵;
32、步骤4、采用加权距离方式计算预测结果和测量结果之间的距离,并根据加权距离计算卡尔曼增益,计算公式为:
33、
34、在公式(4)中,k(k+1)为k+1时刻电机运行状态更新的卡尔曼增益,r为测量噪声协方差矩阵;
35、步骤5、基于更新后的状态估计误差协方差矩阵和控制参数权重矩阵,计算控制参数向量的公式为:
36、
37、在公式(5)中,u(k+1)为k+1时刻控制参数向量。
38、作为本发明进一步的技术方案,所述位置控制单元、速度控制单元和力矩控制单元通过分布式并行方式对电机驱动进行控制,所述位置控制单元通过磁性旋转角度传感器和增量式编码器对电机轴的位置和角度进行控制,所述速度控制单元采用滑模观测器和脉宽调制控制电机的转速,所述力矩控制单元通过电子调速器和变频器控制电机的输出力矩,所述反馈控制单元通过实时反馈控制电路对电机的运行状态进行反馈控制。
39、作为本发明进一步的技术方案,所述实时反馈控制电路通过反馈传感器节点实时检测电机的输出电压、电流和转速,并通过运算放大器对传感器的检测信号进行放大和滤波,所述实时反馈控制电路通过比较器将实际输出状态与期望输出状态进行比较得到误差信号,并将所述误差信号输入至高精度电机驱动模型生成反馈控制指令,所述反馈控制指令通过电机驱动器转换为电机驱动信号进行电机反馈控制驱动。
40、作为本发明进一步的技术方案,所述远程可视化控制平台通过高速无线通讯网络进行电机远程驱动控制,并采用交互式图表、热点图和仪表板实现电机驱动过程的实时数据监控,所述高速无线通讯网络通过物理层、数据链路层和网络层协议接收电机状态数据,并输出控制指令,所述远程可视化控制平台采用token用户身份验证机制验证访问用户的身份。
41、积极有益效果:
42、本发明公开了一种高精度电机驱动方法,结合物联网平台、机器学习和无线传感器网络,实现对电机驱动的智能化控制,具有高实时性和准确性。通过无线传感器网络实时采集电机运行参数,包括电机的转速、转角、转矩、加速度、电流和电压等。相较于传统方法只能采集少量关键参数,该方法可以获取更为全面的电机性能数据,从而提高了精度;通过自监督表征学习方法判断当前电机运行状态,具有更强的智能化和自适应性;利用增量式自适应预测控制算法构建高精度电机驱动模型。与传统的pid控制相比,该算法具有更好的鲁棒性和追踪性能,在不同负载条件下都能够保持较好的控制效果;采用闭环控制模型对电机的运行进行实时调整和优化,包括位置控制单元、速度控制单元、力矩控制单元和反馈控制单元。这些单元相互协作,能够更加精确地控制电机的运行状态,提高了驱动精度;提供了远程可视化控制平台,可以方便地对电机进行远程控制和监测。这种方式可以极大地方便用户的使用,并且能够及时获取电机性能数据,保证了设备的稳定运行;自动化、智能化程度高。
- 还没有人留言评论。精彩留言会获得点赞!