一种绕组开放式电机的双模式调制策略及驱动系统
本发明涉及一种永磁电机驱动系统,尤其涉及一种绕组开放式电机的双模式调制策略及驱动系统。
背景技术:
1、takahashi i首次提出绕组开放式异步电机结构,绕组开放式拓扑在感应电机、永磁无刷电机领域得到关注与应用。绕组开放式结构是将电机绕组中性点打开,两端各接一个逆变器。绕组开放式永磁无刷电机可以有效拓宽电机转速运行范围,同时具有电压利用率高、器件承受电压低、输出电压波形好、输出谐波小等优势。
2、然而绕组开放式电机驱动系统调制策略合成电压空间矢量的同时,存在零序电流回路,系统存在零序电压产生零序电流的问题,电流谐波畸变率较高,导致电机损耗增大和系统性能降低。选择部分合成电压空间矢量范围,不产生零序电压的矢量,不产生零序电流,会降低母线电压利用率低,导致电机调速范围减小。
技术实现思路
1、发明目的:针对以上问题,本发明提出一种绕组开放式电机的双模式调制策略及驱动系统,能够减小零序电流导致的损耗,以及零序电流对驱动系统性能影响,同时不降低母线电压利用率,保持较宽调速范围。
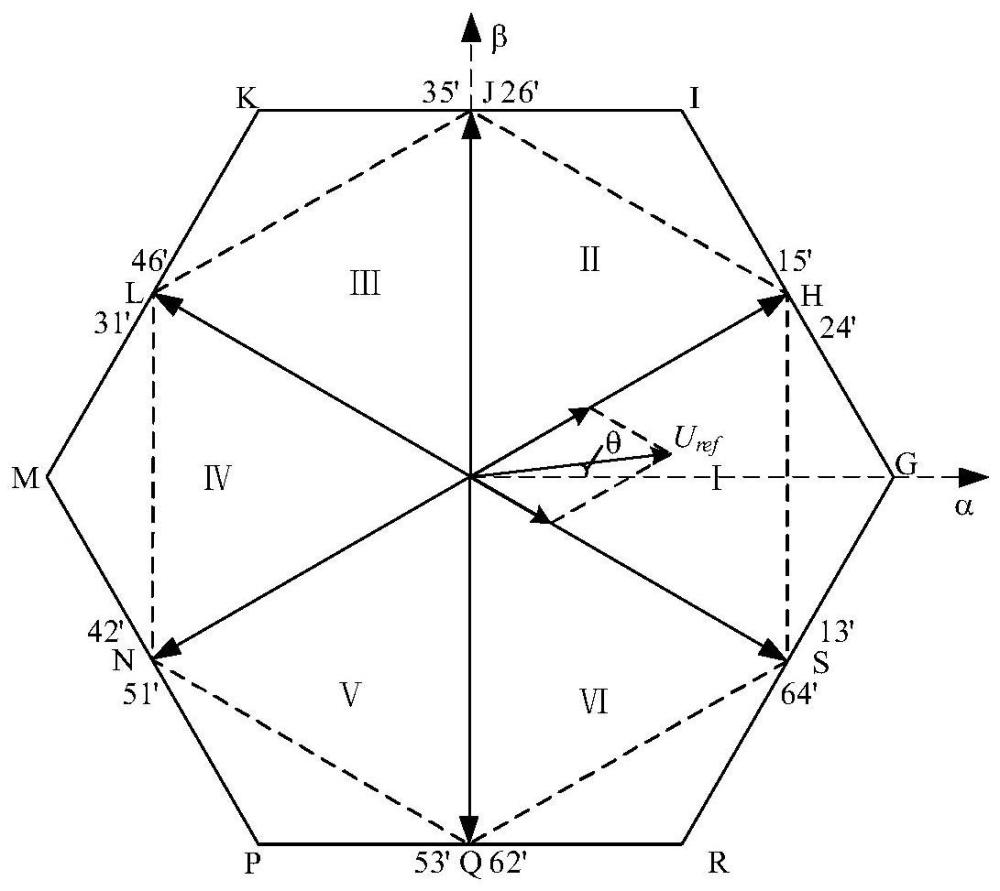
2、技术方案:本发明所采用的技术方案是一种绕组开放式电机的双模式调制策略,包括:当电机转速n≤nn,控制器采用中间六边形调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行;所述中间六边形调制模式的空间电压矢量幅值为对应的线性最大调制系数为1;采用中间六边形调制模式,空间电压合成不会产生共模电压,因而不会产生零序电压造成零序电流,抑制零序电流导致的损耗。
3、当电机转速n>nn,控制器切换为最大范围调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行;所述最大范围调制模式的空间电压矢量幅值为为4ude/3,对应的线性最大调制系数为采用最大范围调制模式提高了母线电压利用率,扩大转速范围。
4、具体的,绕组开放式电机的双模式调制策略还包括:
5、通过位置传感器采集位置信号,通过电流检测模块采集三相电流,通过电压检测模块采集直流母线电压;
6、输入控制器的位置信号通过位置及速度计算模块,输出得到转子位置角度θ、计算得到电机实时转速n;
7、使用id*=0的矢量控制策略,将给定的d轴调节电流id*与坐标变换模块输出的d轴电流id做差,得到d轴电流差值δid,并将d轴电流差值δid输入至d轴电流调节模块中;
8、将控制器给定的转速n*与位置及速度计算模块输出的转速n做差,得到转速差值δn,将转速差值δn输入至转速调节模块;
9、将转速调节模块输出的q轴调节电流iq*与坐标变换模块输出的q轴电流iq做差,得到q轴电流差值δiq,并将q轴电流差值δiq输入至q轴电流调节模块中;
10、在零序电流抑制回路,将给定的i0*与坐标变换模块输出的零序电流i0做差,得到零序电流差值δi0,并将零序电流差值δi0输入至混合控制器模块中;
11、将d轴电流调节器模块输出ud*、q轴电流调节器模块输出uq*及混合控制器模块输出u0*,以及位置及速度计算模块输出的转子位置角θ,共同输入到dq0/αβ0模块中;将dq0/αβ0模块输出的电压uα、uβ、u0输入到svpwm模块,svpwm模块分别控制第一标准两电平逆变器、第二标准两电平逆变器,驱动电机运行。
12、其中所述混合控制器模块包括:将零序电流差值δi0输入至二阶广义积分器,将基波电角频率ω0作为二阶广义积分器的同步参考频率,得到抑制输出ur;将零序电流差值δi0输入至滤波器,得到动态响应输出up;将抑制输出ur与动态响应输出up相加后除以直流母线电压udc,得到标幺后的零序电压输出u0*。
13、抑制输出的表达式为:
14、ur=f(s)δi0
15、其中,f(s)为二阶广义积分器的传递函数。
16、二阶广义积分器的传递函数表达式为:
17、
18、其中s为复变量;ω0为基波电角频率,k为阻尼系数。
19、动态响应输出的计算公式为:
20、up=kpδi0
21、其中kp为比例增益。
22、本发明提出一种绕组开放式电机的驱动系统,包括两个两电平逆变器、绕组开放式永磁无刷电机、供电电源、电机控制器、位置传感器、电流传感器以及电压传感器,所述电机控制器分别通过位置传感器、电流传感器与绕组开放式永磁无刷电机连接,所述供电电源电压输出端通过电压传感器与所述电机控制器连接,所述电机控制器的信号输出端与两个两电平逆变器的输入端连接,两个两电平逆变器的输出端均与所述绕组开放式永磁无刷电机连接,当电机转速n≤nn,控制器采用中间六边形调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行,所述中间六边形调制模式的空间电压矢量幅值为对应的线性最大调制系数为1;当电机转速n>nn,控制器切换为最大范围调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行,所述最大范围调制模式的空间电压矢量幅值为为4udc/3,对应的线性最大调制系数为
23、其中,所述电机控制器包括位置及速度计算模块、坐标变换模块、dq0/αβ0模块、无共模电压svpwm模块、转速调节模块、d轴电流调节模块、q轴电流调节模块与混合控制器模块。
24、所述电流传感器输出端与所述坐标变换模块输入端连接,所述坐标变换模块输出端分别与d轴电流调节模块、q轴电流调节模块、混合控制器模块输入端连接;电压传感器输出端分别与所述d轴电流调节模块、q轴电流调节模块输入端连接;转速调节模块与所述q轴电流调节模块输入端连接;位置传感器输出端与位置及速度计算模块输入端连接,位置及速度计算模块输出端分别与转速调节模块、混合控制器模块、dq0/αβ0模块输入端连接;所述dq0/αβ0模块输出端与无共模电压svpwm模块输入端连接,所述无共模电压svpwm模块的信号输出端分别与两个两电平逆变器的输入端连接。
25、所述两电平逆变器为三桥臂结构,每桥臂由两个igbt开关器件及分别与igbt开关器件并联的反向二极管组成。
26、有益效果:相比于现有技术,本发明具有以下优点:本发明采用的双模式调制策略,当车辆高速运行时,需要电机在额定转速以上运行,切换最大范围调制模式,可以提高直流母线电压利用率,扩大转速范围。当车辆中低速运行时,需要电机在额定转速以下中、低速范围运行,切换中间六边形调制模式,可以抑制共模电压的产生,从而抑制零序电流,减小零序电流导致的损耗,以及零序电流对驱动系统性能影响。本发明采用的双模式调制策略开绕组电机驱动系统,不需要增加额外的硬件设备,通过软件调制策略实现,不增加额外的成本。
技术特征:
1.一种绕组开放式电机的双模式调制策略,其特征在于,包括:
2.根据权利要求1所述的绕组开放式电机的双模式调制策略,其特征在于:该策略还包括:
3.根据权利要求2所述的绕组开放式电机的双模式调制策略,其特征在于:所述混合控制器模块包括:将零序电流差值δi0输入至二阶广义积分器,将基波电角频率ω0作为二阶广义积分器的同步参考频率,得到抑制输出ur;将零序电流差值δi0输入至滤波器,得到动态响应输出up;将抑制输出ur与动态响应输出up相加后除以直流母线电压udc,得到标幺后的零序电压输出u0*。
4.根据权利要求3所述的绕组开放式电机的双模式调制策略,其特征在于:抑制输出的表达式为:
5.根据权利要求4所述的绕组开放式电机的双模式调制策略,其特征在于:二阶广义积分器的传递函数表达式为:
6.根据权利要求3所述的绕组开放式电机的双模式调制策略,其特征在于:动态响应输出的计算公式为:
7.一种绕组开放式电机的驱动系统,包括两个两电平逆变器、绕组开放式永磁无刷电机、供电电源、电机控制器、位置传感器、电流传感器以及电压传感器,所述电机控制器分别通过位置传感器、电流传感器与绕组开放式永磁无刷电机连接,所述供电电源电压输出端通过电压传感器与所述电机控制器连接,所述电机控制器的信号输出端与两个两电平逆变器的输入端连接,两个两电平逆变器的输出端均与所述绕组开放式永磁无刷电机连接,其特征在于:当电机转速n≤nn,控制器采用中间六边形调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行,所述中间六边形调制模式的空间电压矢量幅值为对应的线性最大调制系数为1;当电机转速n>nn,控制器切换为最大范围调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行,所述最大范围调制模式的空间电压矢量幅值为为4udc/3,对应的线性最大调制系数为
8.根据权利要求7所述的绕组开放式电机的驱动系统,其特征在于:所述电机控制器包括位置及速度计算模块、坐标变换模块、dq0/αβ0模块、无共模电压svpwm模块、转速调节模块、d轴电流调节模块、q轴电流调节模块与混合控制器模块。
9.根据权利要求8所述的绕组开放式电机的驱动系统,其特征在于:所述电流传感器输出端与所述坐标变换模块输入端连接,所述坐标变换模块输出端分别与d轴电流调节模块、q轴电流调节模块、混合控制器模块输入端连接;电压传感器输出端分别与所述d轴电流调节模块、q轴电流调节模块输入端连接;转速调节模块与所述q轴电流调节模块输入端连接;位置传感器输出端与位置及速度计算模块输入端连接,位置及速度计算模块输出端分别与转速调节模块、混合控制器模块、dq0/αβ0模块输入端连接;所述dq0/αβ0模块输出端与无共模电压svpwm模块输入端连接,所述无共模电压svpwm模块的信号输出端分别与两个两电平逆变器的输入端连接。
10.根据权利要求7所述的绕组开放式电机的驱动系统,其特征在于:所述两电平逆变器为三桥臂结构,每桥臂由两个igbt开关器件及分别与igbt开关器件并联的反向二极管组成。
技术总结
本发明公开了一种绕组开放式电机的双模式调制策略及驱动系统,当电机转速n<=nN,控制器采用中间六边形调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行,所述中间六边形调制模式的空间电压矢量幅值为对应的线性最大调制系数为1;当电机转速n>nN,控制器切换为最大范围调制模式控制两个标准两电平逆变器,驱动绕组开放式电机运行,所述最大范围调制模式的空间电压矢量幅值为为4U<subgt;dc</subgt;/3,对应的线性最大调制系数为可以抑制共模电压的产生,从而抑制零序电流,减小零序电流导致的损耗,以及零序电流对驱动系统性能影响,同时可以提高直流母线电压利用率,扩大转速范围。
技术研发人员:吴方正,鲁庆,王若群,张涛,莫丽红,武莎莎,叶晓婷,陈万
受保护的技术使用者:淮阴工学院
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!