一种机器人充电到位检测方法、装置、设备及存储介质与流程
本发明涉及机器人,尤其涉及一种机器人充电到位检测方法、装置、设备及存储介质。
背景技术:
1、目前智能机器人领域充电一般采用自主充电的方式实现,以减少人工的干预。业内常用做法是用两组平行的固定电极,一组设于机器人上,另一组设于充电桩上;需要充电的时候,机器人用自身的电极去碰撞桩上的电极,实现接触充电。
2、机器人自主回到充电桩的过程是存在误差以及意外情况的,如果充电桩没有按照预计的情况与充电桩完全对准,就开始通过充电电极开始充电,是存在安全隐患的。
3、有鉴于此,亟需一种机器人充电到位检测方法,用于解决机器人如何自主实现正常充电的技术问题。
4、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种机器人充电到位检测方法、装置、设备及存储介质,旨在解决现有技术中机器人如何自主进行正常充电的技术问题。
2、为实现上述目的,本发明提供了一种机器人充电到位检测方法,所述方法包括以下步骤:
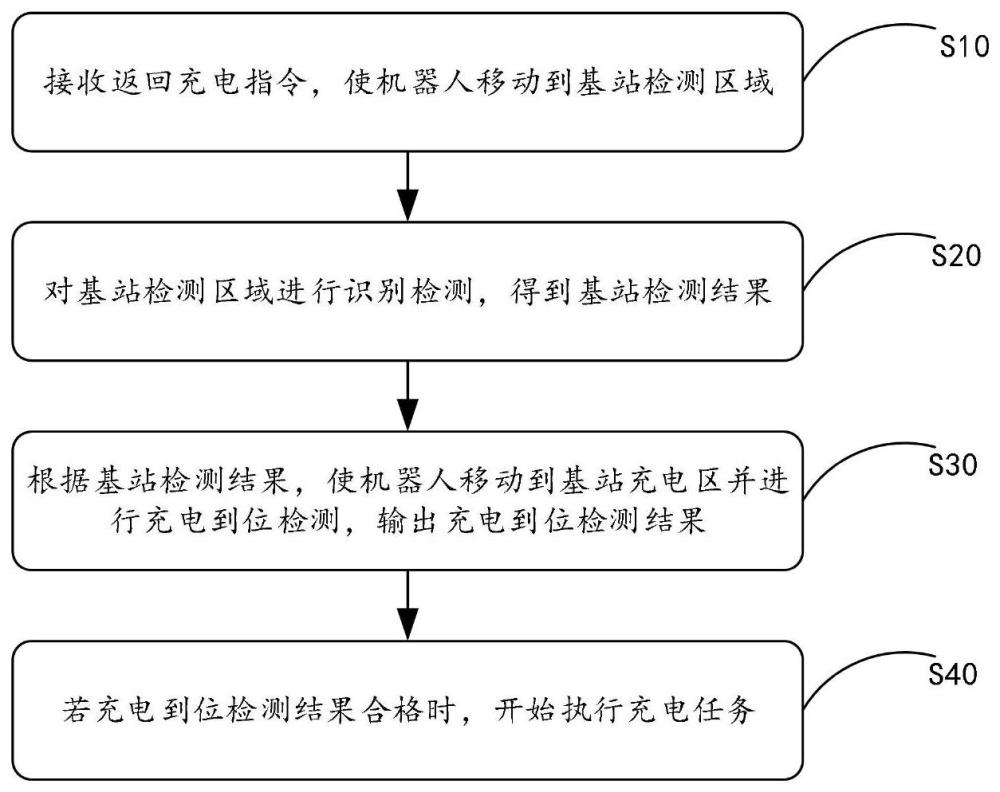
3、接收返回充电指令,使机器人移动到基站检测区域;
4、对基站检测区域进行识别检测,得到基站检测结果;
5、根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果;
6、若所述充电到位检测结果合格时,开始执行充电任务。
7、可选地,接收返回充电指令,使机器人移动到基站检测区域,步骤包括:
8、接收返回充电指令后,解析所述返回充电指令,得到返回充电行进指令集合;
9、根据所述返回充电行进指令集合,按序执行各个返回充电行进指令,到达所述基站检测区域。
10、可选地,对基站检测区域进行识别检测,得到基站检测结果,步骤包括:
11、对所述基站检测区域进行扫描,得到环境扫描结果;
12、对所述环境扫描结果进行数据处理,得到初始基站信息;
13、获取当前定位模式,并基于所述初始基站信息进行初始基站信息优化,得到所述基站检测结果。
14、可选地,对所述环境扫描结果进行数据处理,得到初始基站信息,步骤包括:
15、对所述环境扫描结果进行噪声数据剔除,得到处理后的环境扫描数据;
16、对所述处理后的环境扫描数据进行数据分析,得到所述初始基站信息。
17、可选地,获取当前定位模式,并基于所述初始基站信息进行初始基站信息优化,得到所述基站检测结果,步骤包括:
18、获取当前定位模式;
19、若所述当前定位模式为雷达坐标定位,则基于所述初始基站信息进行初始基站信息优化,得到雷达坐标系下的所述基站检测结果;
20、若所述当前定位模式为地图坐标定位,则基于所述初始基站信息进行初始基站信息优化,得到地图坐标系下的所述基站检测结果。
21、可选地,根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果,步骤包括:
22、根据所述基站检测结果,使机器人移动到基站充电区,进行充电接口对接,并对充电接口状态进行实时检测输出相应的充电接口状态;
23、若所述充电接口状态为连接状态,则输出合格的充电到位检测结果;
24、若所述充电接口状态为断开状态,输出不合格的充电到位检测结果。
25、可选地,根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果之后,还包括:
26、若所述充电到位检测结果不合格时,循环进行接口对接操作,并实时检测相应的充电接口状态;
27、若接口对接操作循环次数未达到预设检测阈值时,若所述充电接口状态为连接状态,则输出合格的充电到位检测结果;
28、若接口对接操作循环次数达到预设检测阈值时,若所述充电接口状态为断开状态,则输出不合格的充电到位检测结果并发出警报。
29、此外,为实现上述目的,本发明还提出一种机器人充电到位检测装置,所述机器人充电到位检测装置包括:
30、指令接收模块:接收返回充电指令,使机器人移动到基站检测区域;
31、基站检测模块:对基站检测区域进行识别检测,得到基站检测结果;
32、充电检测模块:根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果;
33、结果反馈模块:若所述充电到位检测结果合格时,开始执行充电任务。
34、此外,为实现上述目的,本发明还提出一种机器人充电到位检测设备,所述机器人充电到位检测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人充电到位检测程序,所述机器人充电到位检测程序配置为实现如上文所述的机器人充电到位检测方法的步骤。
35、此外,为实现上述目的,本发明还提出一种存储有计算机程序的计算机可读存储介质,所述存储介质上存储有机器人充电到位检测程序,所述机器人充电到位检测程序被处理器执行时实现如上文所述的机器人充电到位检测方法的步骤。
36、本发明接收返回充电指令,使机器人移动到基站检测区域;对基站检测区域进行识别检测,得到基站检测结果;根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果;若所述充电到位检测结果合格时,开始执行充电任务。本发明先使机器人移动到基站检测区域确定基站的位置,进而再根据基站检测结果确定基站的充电区,最后通过对充电接口的状态检测判断机器人充电条件是否满足,确保了机器人正常充电环境,提高了机器人充电到位状态的判定准确性。
技术特征:
1.一种机器人充电到位检测方法,其特征在于,包括:
2.根据权利要求1所述的机器人充电到位检测方法,其特征在于,接收返回充电指令,使机器人移动到基站检测区域,步骤包括:
3.根据权利要求1所述的机器人充电到位检测方法,其特征在于,对基站检测区域进行识别检测,得到基站检测结果,步骤包括:
4.根据权利要求3所述的机器人充电到位检测方法,其特征在于,对所述环境扫描结果进行数据处理,得到初始基站信息,步骤包括:
5.根据权利要求3所述的机器人充电到位检测方法,其特征在于,获取当前定位模式,并基于所述初始基站信息进行初始基站信息优化,得到所述基站检测结果,步骤包括:
6.根据权利要求1-5任一项所述的机器人充电到位检测方法,其特征在于,根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果,步骤包括:
7.根据权利要求1所述的机器人充电到位检测方法,其特征在于,根据所述基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果之后,还包括:
8.一种应用权利要求1-7任一所述的机器人充电到位检测方法的检测装置,其特征在于,所述机器人充电到位检测装置包括:
9.一种机器人充电到位检测设备,其特征在于,所述机器人充电到位检测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人充电到位检测程序,所述机器人充电到位检测程序配置为实现根据权利要求1至7中任一项所述的机器人充电到位检测方法。
10.一种存储有计算机程序的计算机可读存储介质,其特征在于,计算机程序被处理器执行时能够实现权利要求1至7任一项所述的机器人充电到位检测方法中的步骤。
技术总结
本发明公开了一种机器人充电到位检测方法、装置、设备及存储介质,属于机器人技术领域。本发明接收返回充电指令,使机器人移动到基站检测区域;对基站检测区域进行识别检测,得到基站检测结果;根据基站检测结果,使机器人移动到基站充电区并进行充电到位检测,输出充电到位检测结果;若充电到位检测结果合格时,开始执行充电任务。本发明先使机器人移动到基站检测区域确定基站的位置,进而再根据基站检测结果确定基站的充电区,最后通过对充电接口的状态检测判断机器人充电条件是否满足,确保了机器人正常充电环境,提高了机器人充电到位状态的判定准确性。
技术研发人员:文鹏,廖荣东,罗必鑫
受保护的技术使用者:虎鲸(深圳)创新技术有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!