一种多相电机单相开路之后的绕组连接拓扑以及控制方法
本发明属于多相电机驱动控制领域,尤其是涉及一种用于含正弦反电势的五相永磁同步电机的容错控制拓扑和方法。
背景技术:
1、多相永磁同步电机因其高控制自由度、低转矩脉动和低每相电流而被广泛应用于电动汽车和船舶推进等各个工业领域。得益于高容错能力,多相电机也被用来提高驱动系统的安全性和可靠性。因此,针对故障运算的研究越来越受到人们的关注。绕组开路故障是许多电机故障中常见的故障。在这种情况下,其余相电流不能产生环形磁动势,从而导致扭矩和速度脉动。因此,必须修改控制策略以保持平滑的扭矩和速度输出。当故障相电流消失时,应重新配置健康相电流以校正圆磁动势。
2、解耦变换矩阵对于实现磁场定向控制至关重要。在健康状况下,传统的对称解耦变换矩阵可用于实现五相电机的磁场定向控制。然而,当绕组发生开路故障时,需要重构变换矩阵以保持正交性。然而传统的五相电机容错之后,将相电流解耦到谐波空间之后,谐波电流会引起转矩脉动。此外使用pi控制器不能很好的跟踪交变的谐波电流。因此对于谐波电流引起的转矩脉动任然没有很好的抑制。亟需提出一种可以很好地消除谐波电流的五相永磁电机容错控制策略,提升电机系统的可靠性。
技术实现思路
1、发明目的:为了消除正弦反电势的五相永磁电机一相开路下由谐波电流引起的转矩脉动,本发明公开了一种用于正弦反电势的五相永磁电机一相开路故障下的绕组连接拓扑以及其对应的容错控制策略。
2、为实现上述发明目的,本发明所采用如下的技术方案:
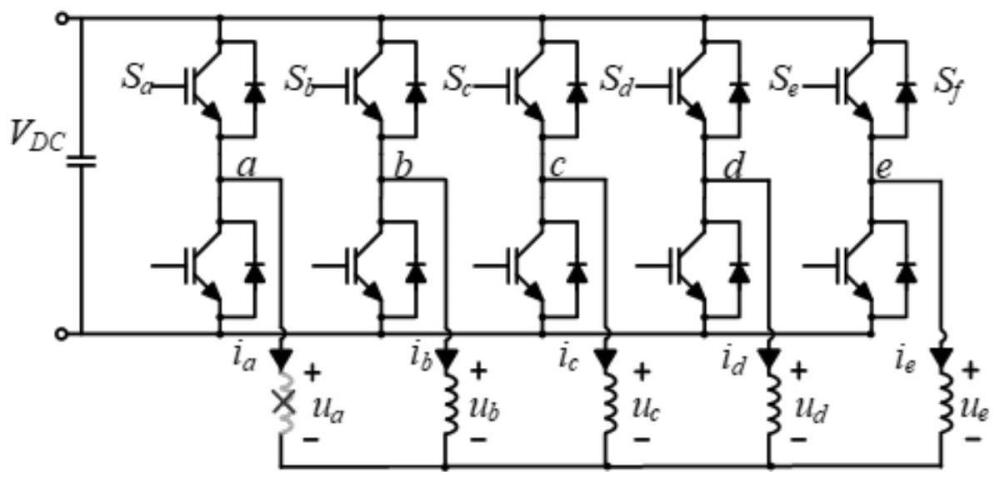
3、本发明提供了一种用于正弦反电势的五相永磁电机一相开路故障下的绕组连接拓扑以及其对应的容错控制策略。实施步骤包括:一种多相永磁电机单相开路容错控制拓扑及方法,包括如下步骤:
4、步骤1)设a相发生开路故障,以最大转矩运行为约束条件,根据磁动势不变原则推导出五相永磁电机在单相开路之后的参考电流表达式ib,ic,id,ie;
5、步骤2)根据步骤1中求得的参考电流表达式,确定基波空间解耦向量t1,t2,通过求解与基波变换矩阵正交的向量确定谐波空间的解耦矩阵t3,t4;对基波和谐波空间解耦矩阵进行单位化求得一相开路故障下的解耦矩阵ts;
6、步骤3)通过步骤2中求得的谐波空间解耦变换矩阵和参考相电流表达式求出谐波空间电流表达式iz1,iz2;令步骤3中求得的谐波电流iz1,iz2为零,可以得出ib=-id,ic=-ie;即可获得使谐波空间电流为零的绕组连接方式为:b相和d相串联,c相和e相串联;
7、步骤4)在步骤3所述控制系统拓扑的基础上,推导出解耦的定子电压方程组u和转矩方程te;电压方程中消除了谐波项,转矩方程中消除了谐波引起的脉动项;
8、步骤5)在步骤4所述逆变器和电机连接拓扑的特点:即非邻相绕组串联的绕组拓扑,可将步骤2述四维解耦矩阵ts简化为二维矩阵;反向解耦变换矩阵进一步简化为二维矩阵;采样转速n作为反馈量由pi控制器输出给定转矩,采集b、c相电流经过坐标变换后获得d轴和q轴实际电流;
9、步骤6)采用id=0的控制方式,由pi控制器输出给定的d轴和q轴参考电压ud和uq,经t-1坐标变换后得到b、c相参考电压ub和uc;对ub取反得到d相参考电压ud;对uc取反得到e相参考电压ue;
10、步骤7)分别计算相反电动势eb、ec、ed、ee,分别补偿到参考电压ub、uc、ud、ue得到实际参考电压ub*、uc*、ud*、ue*;
11、步骤8)采用正弦载波调制策略进一步计算得出逆变器每个桥臂对应的占空比db、dc、dd、de,将占空比输入到逆变器控制电机旋转。
12、10、进一步,所述步骤1具体包括:
13、当a相发生开路故障后,以最大转矩为约束条件,根据故障前后磁动势不变原则推导出五相永磁电机在单相开路故障之后的参考电流表达式
14、
15、求得其余相的参考电流为
16、
17、其中n为相绕组因数,δ为每相磁动势的空间相位,i为故障前相电流的幅值,ω为电角速度。
18、11、进一步,所述步骤2具体包括:
19、根据步骤1求得的参考电流,确定基波空间的向量为:
20、
21、根据解耦变换理论,求得解耦矩阵为:
22、
23、12、进一步,所述步骤3具体包括:
24、根据步骤2的解耦变换矩阵求得谐波电流表达式为:
25、
26、令谐波电流为0,可以得出ib=-id,ic=-ie;因此可以得到使得谐波电流为零的绕组连接方式为b相和d相串联,c相和e相串联;即不相邻的两相串联。
27、13、进一步,所述步骤4具体包括:
28、由步骤3所得绕组连接拓扑消除了谐波电流,谐波电流为0,因此谐波平面电压也为0;故障后的电压方程可以由原始坐标系下的电压方程经过解耦矩阵ts和旋转变换矩阵
29、
30、变换为旋转坐标系下的电压方程:
31、
32、其中,其中θ为电角度,rs为相电阻,ls为相自感,ω为电角速度,ψ1为永磁体磁链;将相电流,磁链带入磁共能求导公式:
33、
34、其中θr为转子位置角,te为电磁转矩,p为电机极对数,is为电机相电流构成的列向量,ls为相自感构成的列向量,wco代表磁共能;求得的电机电磁转矩的表达式为:
35、te=2.5pψ1iq
36、其中p为极对数,ψ1为永磁体磁链,iq为q轴电流。
37、14、进一步,所述步骤5具体包括:
38、根据步骤4所述的绕组连接拓扑,非邻两相互相串联之后其相电流大小完全相等,方向相反;采样b、c相电流就可以获得全部相电流;此外根据解耦矩阵前两行的非邻两列三角函数相位互差π,因此相电流从原始坐标系到旋转坐标系的坐标变换可以简化成
39、
40、其中,θ为电角度。
41、15、进一步,所述步骤6具体包括:
42、采集电机转速n与给定转速做差,求得转速误差由pi控制器输出给定转矩;采用id=0的控制方式,用实际的d轴电流与给定的id作比较,由pi控制器输出给定的励磁电压ud;用实际的q轴电流和转速换输出的给定转矩作比较,由pi控制器输出实际的q轴给定电压uq;将ud、uq反变换可以得到b、c相电压:
43、
44、取反得到d、e相的参考相电压:
45、
46、其中,θ为电角度,ud,uq分别为给定的d轴和q轴参考电压。
47、16、进一步,所述步骤7具体包括:
48、根据采样计算得到的电角度,以及永磁体磁链可以计算出电机的相反电动势为:
49、
50、将反电动势补偿到参考相电压得到实际的参考相电压:
51、
52、
53、其中,θ为电角度,ω为电角速度,ψ1为永磁体磁链,ud、uq分别为pi控制器给定的d轴和q轴参考电压。
54、17、进一步,所述步骤8具体包括:
55、每相占空比可以由实际参考相电压经正弦载波调制策略计算得出:
56、
57、其中vdc为母线电压幅值,db、dc、dd、de表示每相的占空比;将占空比输出给五相逆变器的上下桥臂,驱动五相电机旋转。
58、本发明的有益效果:
59、1)本发明在基于五相电机一相开路的情况在最大转矩约束下的控制策略,提出了一种解耦矩阵,可以将相电流解耦到基波空间和谐波空间,各个子空间互相解耦互不影响。
60、2)由解耦矩阵提出了一种绕组连接拓扑,对正弦反电动势的五相电机,该拓扑可以将谐波空间电流完全消除,使得相电流更加平衡。有助于降低转矩脉动,提高了电机的性能和稳定性。
61、3)一相开路故障下,对正弦反电动势的五相电机,转矩脉动将明显减小,提高了电机的稳态性能。
62、4)在该绕组拓扑下所需的电流传感器的数量减小了一半,电流控制器数量减少了三分之一,坐标变换也得到进一步简化,大大简化了控制结构,提高了可靠性。
63、通过整合解耦矩阵和绕组连接拓扑,可能实现更高效的相电流控制,减小电机在一相开路故障下的转矩脉动。这样的整合可能提高了电机的稳态性能和容错能力。
- 还没有人留言评论。精彩留言会获得点赞!