跨越封网作业设备及跨越封网作业方法与流程
本发明属于工程机械,具体涉及一种跨越封网作业设备及跨越封网作业方法。
背景技术:
1、在电网建设过程中,常会用到跨越封网作业设备,以使电线能够安全跨越高速路、铁路等线路并保证电线下方的安全。目前常用的跨线施工的封网方式主要有脚手架式、吊桥式、双轨推进式、旋转臂式、伞形以及臂架展开式等,其中脚手架式应用最广,脚手架式跨线施工需要先搭设跨越架,然后通过人工的方式在跨越架上搭建防护网以进行封网作业,这种施工方式不仅效率较低,同时安全隐患也比较大。
技术实现思路
1、针对上述的缺陷或不足,本发明提供了一种跨越封网作业设备及跨越封网作业方法,旨在解决现有的跨越封网作业效率较低、安全隐患较大的技术问题。
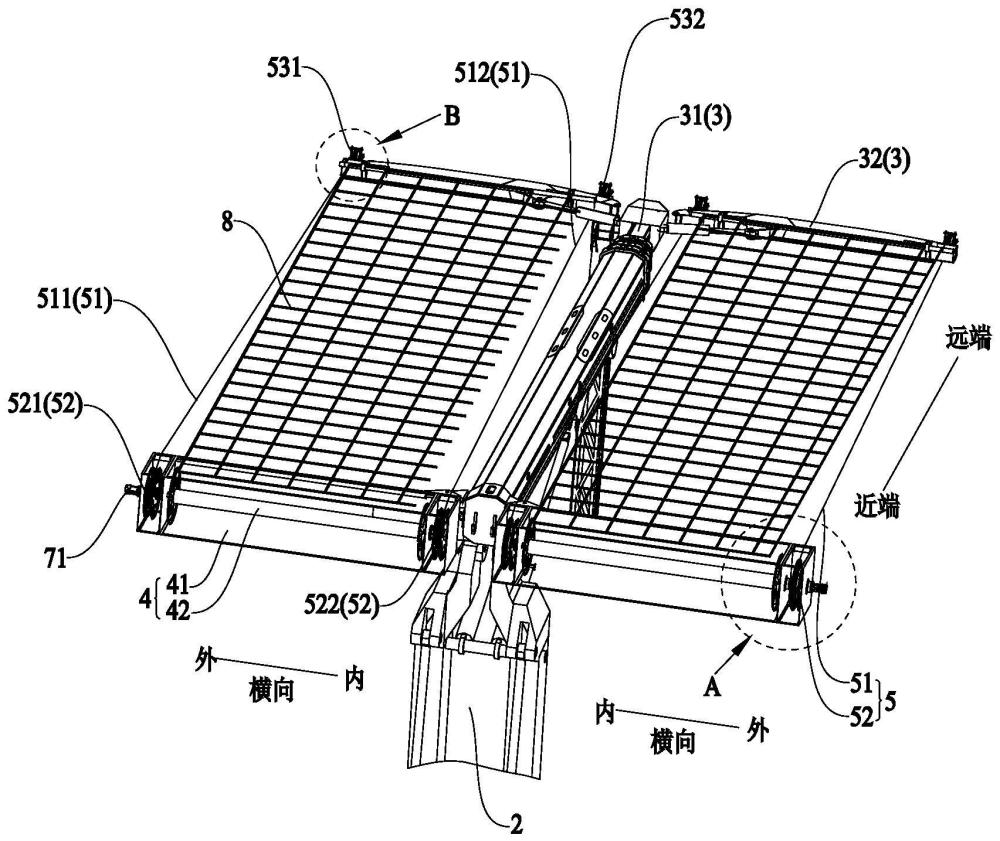
2、为实现上述目的,本发明提供一种跨越封网作业设备,跨越封网作业设备包括门架、防护网收卷机构、牵引机构和锁网组件,门架包括伸缩主臂,防护网收卷机构横向展开设置在伸缩主臂的近端并用于收卷防护网,牵引机构包括牵引绳和设置伸缩主臂的近端并用于收卷或释放牵引绳的绳收卷组件,牵引绳的远端从伸缩主臂的远端绕出并折回与防护网的拉出端连接,锁网组件设置在伸缩主臂的远端并用于锁止防护网,其中,防护网的缠绕方向与牵引绳的缠绕方向相同。
3、在本发明的实施例中,绳收卷组件通过驱动件驱动并与防护网收卷机构通过离合器连接,绳收卷组件的收卷速率为防护网收卷机构的两倍,跨越封网作业设备还包括控制器,控制器被配置为:
4、确认锁网组件锁止防护网;
5、响应于臂架缩回指令;
6、根据臂架缩回指令控制伸缩主臂缩回,控制离合器联接,以及控制驱动件动作。
7、在本发明的实施例中,控制器还被配置为:
8、确认伸缩主臂缩回到位;
9、响应于臂内收网指令;
10、根据臂内收网指令控制离合器断开,并控制驱动件动作,以单独释放预设长度的牵引绳;
11、确认锁网组件解除锁网;
12、控制离合器联接,并控制驱动件动作,以收卷防护网。
13、在本发明的实施例中,控制器被配置为:
14、响应于臂内展网指令;
15、根据臂内展网指令控制离合器断开,并控制驱动件动作;
16、监测防护网的位置,在防护网的拉出端移动至伸缩主臂的远端时控制锁网组件动作。
17、在本发明的实施例中,控制器还被配置为:
18、确认锁网组件锁止防护网;
19、响应于臂架伸出指令;
20、根据臂架伸出指令控制伸缩主臂伸出,并控制驱动件浮动。
21、在本发明的实施例中,防护网收卷机构包括安装在伸缩主臂上的卷扬箱体和转动设置在卷扬箱体内并用于卷设防护网的卷扬筒;绳收卷组件包括分设在卷扬箱体横向两侧的第一近端卷轮和第二近端卷轮,牵引绳包括分别缠绕在第一近端卷轮与第二近端卷轮上的第一绳体和第二绳体,驱动件包括分别用于驱动第一近端卷轮和第二近端卷轮旋转的第一驱动件和第二驱动件,离合器包括与第一近端卷轮和第二近端卷轮一一对应的第一离合器和第二离合器。
22、在本发明的实施例中,控制器还被配置为:
23、响应于臂内展网完成指令,且确认第一绳体的拉力值和第二绳体的拉力值均低于预设区间;
24、控制第一离合器和第二离合器均联接,并控制第一驱动件和第二驱动件动作;
25、响应于臂内展网完成指令,且确认第一绳体的拉力值低于预设区间,第二绳体的拉力值位于预设区间内;
26、控制第一离合器断开,控制第二离合器联接,控制第一驱动件动作;
27、响应于臂内展网完成指令,且确认第二绳体的拉力值低于预设区间,第一绳体的拉力值在预设区间内;
28、控制第二离合器断开,第一离合器联接,控制第二驱动件动作。
29、在本发明的实施例中,跨越封网作业设备还包括底盘,底盘为车用底盘,底盘上设有转台,起升机构铰接设置在转台上。
30、为实现上述目的,本发明还提供一种跨越封网作业方法,跨越封网作业方法包括:
31、s100:提供根据以上所述的跨越封网作业设备;
32、s200:控制防护网收卷机构浮动,并控制绳收卷组件动作,以使防护网的拉出端朝锁网组件移动;
33、s300:在防护网的拉出端移动至伸缩主臂的远端时控制锁网组件锁止防护网;
34、s400:控制伸缩主臂伸出以跨越目标地形,伸缩主臂在伸出时控制防护网收卷机构和绳收卷组件均浮动。
35、在本发明的实施例中,在作业完成后,跨越封网作业方法还包括:
36、s500:控制伸缩主臂缩回,伸缩主臂在缩回的过程中控制防护网收卷机构和绳收卷组件动作以分别收卷牵引绳和防护网;
37、s600:在伸缩主臂缩回到位后,控制绳收卷组件动作,以单独释放预设长度的牵引绳;
38、s700:解除锁网组件的锁止;
39、s800:防护网收卷机构和绳收卷组件动作,以收卷剩余的防护网。
40、通过上述技术方案,本发明实施例所提供的跨越封网作业设备具有如下的有益效果:
41、本发明中的跨越封网作业设备能够实现跨越门架的自动搭建以及防护网的自动展开和回收,整个过程无需人工搭建或拆除任何设备,全由机械化实现,大大降低人工劳动强度,提高了作业效率。
42、本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种跨越封网作业设备,其特征在于,所述跨越封网作业设备包括:
2.根据权利要求1所述的跨越封网作业设备,其特征在于,所述绳收卷组件(52)通过驱动件驱动并与所述防护网收卷机构(4)通过离合器连接,所述绳收卷组件(52)的收卷速率为所述防护网收卷机构(4)的两倍,所述跨越封网作业设备还包括控制器,所述控制器被配置为:
3.根据权利要求2所述的跨越封网作业设备,其特征在于,所述控制器还被配置为:
4.根据权利要求2所述的跨越封网作业设备,其特征在于,所述控制器被配置为:
5.根据权利要求4所述的跨越封网作业设备,其特征在于,所述控制器被配置为:
6.根据权利要求2所述的跨越封网作业设备,其特征在于,所述防护网收卷机构(4)包括安装在所述伸缩主臂(31)上的卷扬箱体(41)和转动设置在所述卷扬箱体(41)内并用于卷设所述防护网(8)的卷扬筒(42);
7.根据权利要求6所述的跨越封网作业设备,其特征在于,所述跨越封网作业设备还包括控制器,所述控制器还被配置为:
8.根据权利要求1至7中任意一项所述的跨越封网作业设备,其特征在于,所述跨越封网作业设备还包括底盘(1),所述底盘(1)为车用底盘(1),所述底盘(1)上设有转台(11),所述门架的一侧设有起升机构(2),所述起升机构(2)铰接设置在所述转台(11)上。
9.一种跨越封网作业方法,其特征在于,所述跨越封网作业方法包括:
10.根据权利要求9所述的跨越封网作业方法,其特征在于,在作业完成后,所述跨越封网作业方法还包括:
技术总结
本发明属于工程机械技术领域并提供一种跨越封网作业设备及跨越封网作业方法,该设备包括门架、防护网收卷机构、牵引机构和锁网组件,门架包括伸缩主臂,防护网收卷机构横向展开设置在伸缩主臂的近端并用于收卷防护网,牵引机构包括牵引绳和设置伸缩主臂的近端并用于收卷或释放牵引绳的绳收卷组件,牵引绳的远端从伸缩主臂的远端绕出并折回与防护网的拉出端连接,锁网组件用于锁止防护网,其中,防护网的缠绕方向与牵引绳的缠绕方向相同。本设备能够实现门架的自动搭建和防护网的自动铺设,整个过程无需人工搭建或拆除任何设备,全由机械化实现,大大降低人工劳动强度,提高了作业效率。
技术研发人员:朱春灿,朱正东,房喆,程德军,龚敬,宋继华
受保护的技术使用者:湖南中联重科应急装备有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!