一种轨道式巡检机器人直流电机掉电制动电路的制作方法
本技术涉及巡检机器人电机驱动与保护,具体涉及一种轨道式巡检机器人直流电机掉电制动电路。
背景技术:
1、正常情况下,巡检机器人的直流驱动电机的驱动电路,采用常规的瞬态电路保护元件tvs等就能满足要求,但是当巡检机器人下坡时,一旦驱动电机掉电,受重力作用影响,电机依然会不停的转动,带动内部的线圈切割磁力线,此时电机相当于一个发电机,产生反向电动势。产生的这个反向的电动势是瞬态电压,远远超过控制电路的元器件包括集成电路的耐压值,会击穿损害元器件,同时由于电机已经失控,在重力的作用下,巡检机器人快速下滑,导致一系列潜在的设备损坏的风险。申请号为2022204122898、名称为一种直流电机驱动保护电路的专利中,提出采用rc电路并联在电机两极,作为瞬态电压的泄放通道,此电路设计仍存在缺陷,一方面如果rc电路中电容的选择要求较高,另一方面无法为巡检机器人下坡失电情况下电机产生的反向电动势提供泄放通道。
技术实现思路
1、技术目的:针对上述技术问题,本实用新型提出了一种巡检机器人电机掉电保制动电路,采用纯阻性无集成电路的结构,能够解决掉电情况下,直流电机产生持续不断的反电动势的问题。
2、技术方案:为实现上述技术目的,本实用新型采用了如下技术方案:
3、一种轨道式巡检机器人直流电机掉电制动电路,其特征在于,包括:
4、电机泄放电路,并联在直流电机的正极和负极之间,用于为直流电机产生的反向电动势提供泄放回路;
5、掉电触发电路,连接所述电机泄放电路,用于触发电机泄放电路导通;
6、电机控制电路,连接直流电机的供电电源和所述掉电触发电路,用于在供电电源正常情况下,向直流电机提供工作电源,以及在供电电源掉电时为直流电机产生的反向电动势时,控制所述掉电触发电路导通。
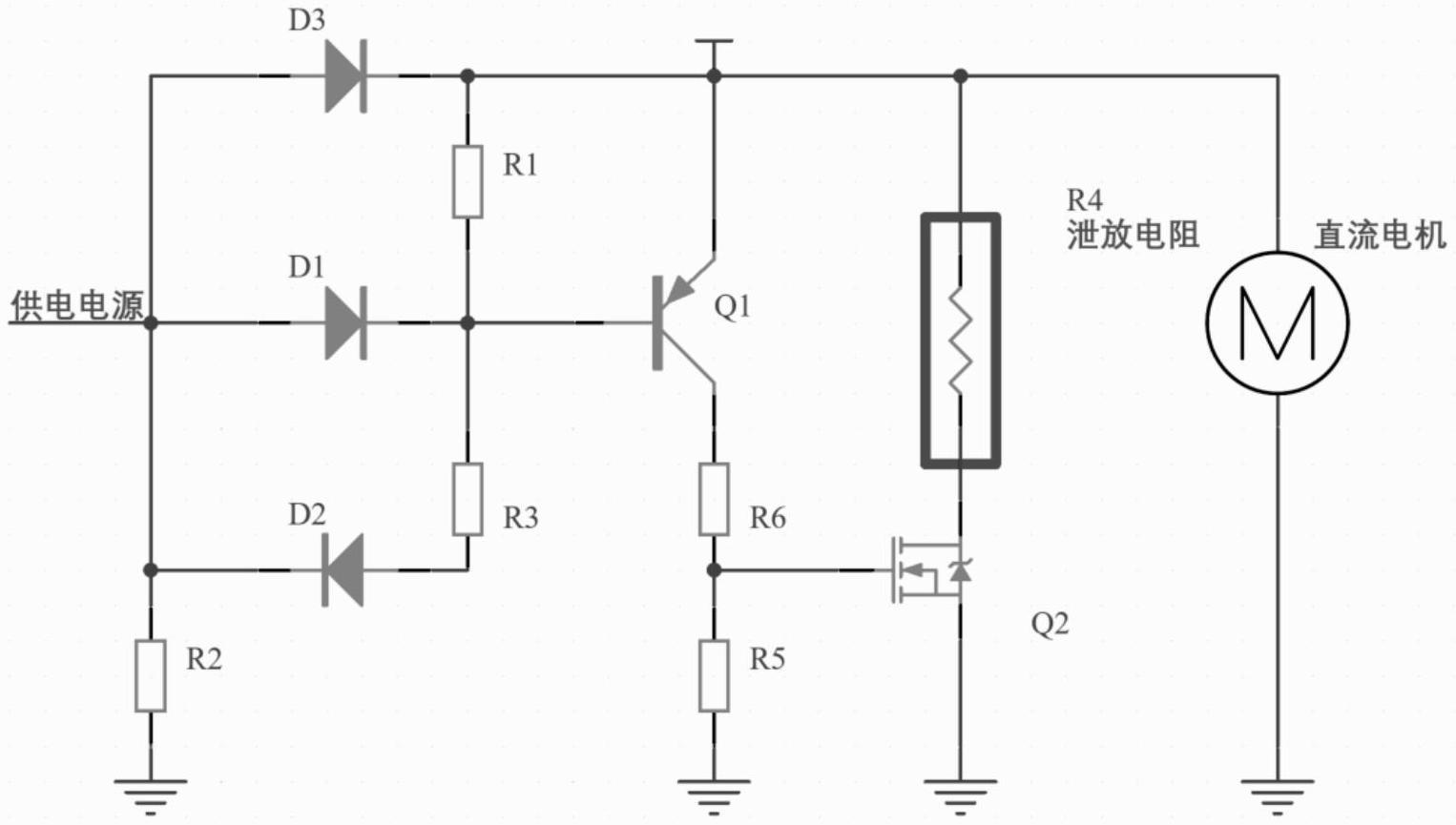
7、优选地,所述电机控制电路包括第一电阻、第二电阻、第三电阻、第一二极管、第二二极管和第三二极管;
8、所述第一二极管的正极和第三二极管的正极均连接供电电源,第一二极管的正极和第三二极管的负极均连接直流电机的正极;所述第二二极管的负极连接供电电源;
9、所述第一电阻的两端分别连接第三二极管的负极与第一二极管的负极,第三电阻的两端分别连接第一二极管的负极和第二二极管的正极,第二电阻的一端连接第二二极管的负极,第二电阻的另一端接地。
10、优选地,所述掉电触发电路包括第一三极管、第五电阻和第六电阻;
11、所述第一三极管的基极连接第一电阻和第三电阻的公共连接点,第一三极管的发射极连接第三二极管的负极,第一三极管的集电极连接串联的第六电阻和第五电阻,第五电阻的另一端接地。
12、优选地,所述电机泄放电路包括第四电阻和第一场效应管;
13、所述第四电阻采用泄放电阻,第四电阻的一端连接所述第一三极管的发射极,第四电阻的另一端连接第一场效应管的源极;
14、所述第一场效应管的栅极连接所述第五电阻和第六电阻的公共连接点,第一场效应管的漏极接地。
15、有益效果:由于采用了上述技术方案,本实用新型具有如下有益效果:
16、1)本实用新型的电路采用纯阻性无集成电路的结构,避免了集成电路容易被瞬态电脉冲损毁,也避免了泄放的rc电路解决方案的弊端,即电容的大小难以选择,同时也无法解决持续不断的反电动势的困惑。
17、2)本实用新型的电路采用纯阻性反电动势泄放回路,可以形成与重力下降运行方向相反的制动力,不断的降低机器人下滑的速度。
技术特征:
1.一种轨道式巡检机器人直流电机掉电制动电路,其特征在于,包括:
2.根据权利要求1所述的一种轨道式巡检机器人直流电机掉电制动电路,其特征在于:所述电机控制电路包括第一电阻(r1)、第二电阻(r2)、第三电阻(r3)、第一二极管(d1)、第二二极管(d2)和第三二极管(d3);
3.根据权利要求2所述的一种轨道式巡检机器人直流电机掉电制动电路,其特征在于:所述掉电触发电路包括第一三极管(q1)、第五电阻(r5)和第六电阻(r6);
4.根据权利要求3所述的一种轨道式巡检机器人直流电机掉电制动电路,其特征在于:所述电机泄放电路包括第四电阻(r4)和第一场效应管(q2);
技术总结
本技术公开了一种轨道式巡检机器人直流电机掉电制动电路,包括并联在直流电机的正极和负极之间,用于为直流电机产生的反向电动势提供泄放回路的电机泄放电路,连接所述电机泄放电路、用于触发电机泄放电路导通的掉电触发电路,连接直流电机的供电电源和所述掉电触发电路的电机控制电路。本技术采用纯阻性无集成电路的结构,能够解决掉电情况下,直流电机产生持续不断的反电动势的问题,而且避免了现有技术中采用集成电路容易被瞬态电脉冲损毁,或采用RC电路电容的大小难以选择的弊端。
技术研发人员:郭为民,沈思贤,张广涛,康合壮,邵壮,向杰,郝涛,张建乐
受保护的技术使用者:润电能源科学技术有限公司
技术研发日:20230404
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!