一种管道内电缆巡检机器人
本技术涉及电缆巡检设备,尤其涉及一种管道内电缆巡检机器人。
背景技术:
1、地下电缆作为电力系统中的重要部分,它的运行安全保障成为关键环节,其运行状况的安全与否将直接关系到整个城市电力系统的安全运行,在长期使用过程中,电缆会受到来自自身和外力的各种影响,发生各类故障,所以必须对电缆进行定期检查与维护。传统的人工检测方法是人工下到管井安放设备对故障电缆进行检测(低压脉冲法、经典电桥法、高压脉冲法等手段方法进行检测),从而判断出两个人工作业区之间的电缆运行状况,如此段线路无故障则换点位重复上述方法直至找出故障点。
2、公开号为cn105576563b的发明专利公开了一种电缆管道巡检机器人,以替代人工沿着管线进行巡检,但其移动方式是行走轮的竖向截面侧边呈内凹弧形以夹紧管道内铺设的电缆线路行走移动,整个装置的荷载作用在电缆上与电缆摩擦,会在一定程度上损伤电缆表皮,留下安全隐患;并且管道内电缆会出现弯曲、多根电缆重叠的情况,上述机器人难以移动。
技术实现思路
1、针对现有技术方案中机器人夹紧电缆导致损伤、在某些情形下难以移动的问题,本实用新型提供了一种管道内电缆巡检机器人。
2、本实用新型提供如下的技术方案:一种管道内电缆巡检机器人,包括:
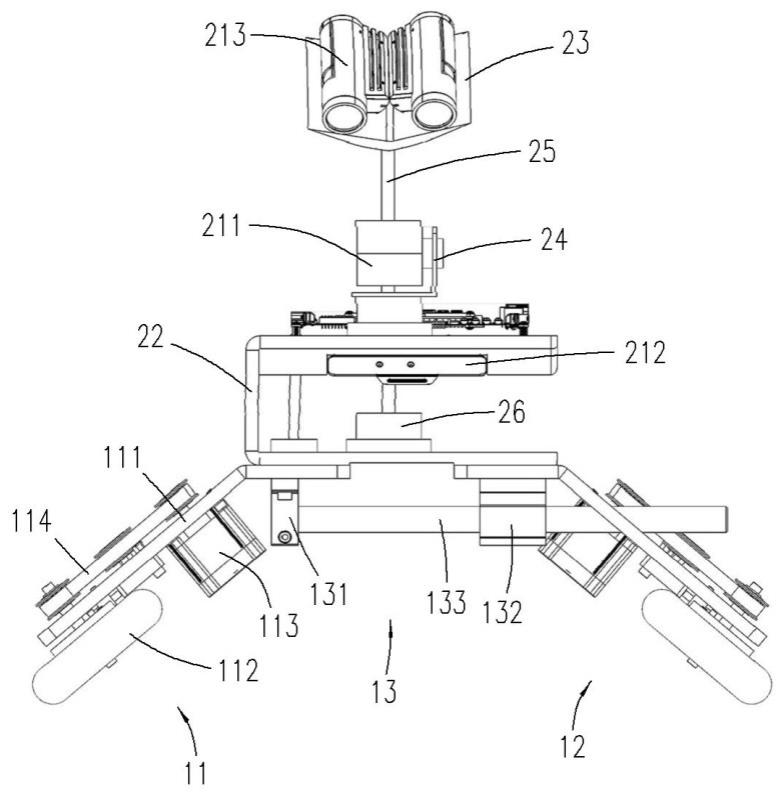
3、移动装置,包括左支架、右支架以及设置在所述左支架和右支架之间的连接支架,所述左支架、右支架均包括侧支板、转动连接在所述侧支板上的滚轮以及与所述滚轮传动连接的驱动电机,所述连接支架包括分别设置在所述左支架上的第一连接座、设置在所述右支架上的第二连接座以及连接在所述第一连接座、第二连接座之间的连杆;
4、图像采集装置,包括图像传感器;
5、通信装置,包括无线通信模块以及与所述无线通信模块信号连接的天线;
6、控制模块,包括中央处理器和运动控制器,所述驱动电机与运动控制器信号连接,所述图像传感器、无线通信模块、运动控制器与中央处理器信号连接。
7、优选地,两所述侧支板排列成八字形。
8、优选地,所述第一连接座为管夹,所述第二连接座为滑动座,所述连杆一端与所述管夹可拆连接且与另一端与所述滑动座滑动连接;所述滑动座还设置有摩擦层,所述摩擦层处于所述滑动座和连杆之间。
9、优选地,所述右支架的侧支板设置有与所述连杆对应的避让孔。
10、优选地,所述图像传感器包括红外图像传感器和可见光图像传感器,所述可见光图像传感器设置有补光灯。
11、优选地,所述图像采集装置还包括设置在所述左支架顶部的u型安装台,所述可见光图像传感器设置在所述u型安装台上,所述可见光图像传感器的朝向倾斜向下且与水平面之间的夹角为45°;所述u型安装台设置有补光灯支架和电动云台,所述补光灯设置在所述补光灯支架上,所述红外图像传感器设置在所述电动云台上。
12、优选地,所述补光灯支架设置有与所述u型安装台转动连接的转轴,所述转轴与转动电机的输出轴传动连接。
13、优选地,所述驱动电机及滚轮设置在两所述侧支板朝向彼此的一侧,所述驱动电机通过同步带传动结构与所述滚轮传动连接,所述同步带传动结构设置在两所述侧支板远离彼此的另一侧。
14、优选地,所述无线通信模块包括sx1278无线模块和rm500u 5g模块,所述中央处理器为rk3588芯片,所述运动控制器为stm32h750xbh6芯片。
15、本实用新型的有益效果是:图像传感器完成图像采集,通过控制模块、通信装置完成与服务器端的通信,控制模块还能通过驱动电机控制机器人的移动,共同完成电缆巡检作业;左支架和右支架分别与管道两侧管壁接触,对机器人形成侧支撑,使机器人处于电缆上方,避免与电缆直接接触产生摩擦留下安全隐患; 能够灵活调节机器人的横向宽度,以适应不同管径的管道,或者调节机器人相对于管道的高度。
技术特征:
1.一种管道内电缆巡检机器人,其特征在于,包括:
2.根据权利要求1所述的一种管道内电缆巡检机器人,其特征在于:两所述侧支板(111)排列成八字形。
3.根据权利要求1所述的一种管道内电缆巡检机器人,其特征在于:所述第一连接座(131)为管夹,所述第二连接座(132)为滑动座,所述连杆(133)一端与所述管夹可拆连接且与另一端与所述滑动座滑动连接;所述滑动座还设置有摩擦层,所述摩擦层处于所述滑动座和连杆(133)之间。
4.根据权利要求3所述的一种管道内电缆巡检机器人,其特征在于:所述右支架(12)的侧支板(111)设置有与所述连杆(133)对应的避让孔。
5.根据权利要求1所述的一种管道内电缆巡检机器人,其特征在于:所述图像传感器包括红外图像传感器(211)和可见光图像传感器(212),所述可见光图像传感器设置有补光灯(213)。
6.根据权利要求5所述的一种管道内电缆巡检机器人,其特征在于:所述图像采集装置还包括设置在所述左支架(11)顶部的u型安装台(22),所述可见光图像传感器(212)设置在所述u型安装台(22)上,所述可见光图像传感器(212)的朝向倾斜向下且与水平面之间的夹角为45°;所述u型安装台(22)设置有补光灯支架(23)和电动云台(24),所述补光灯(213)设置在所述补光灯支架(23)上,所述红外图像传感器(211)设置在所述电动云台(24)上。
7.根据权利要求6所述的一种管道内电缆巡检机器人,其特征在于:所述补光灯支架(23)设置有与所述u型安装台(22)转动连接的转轴(25),所述转轴(25)与转动电机(26)的输出轴传动连接。
8.根据权利要求1所述的一种管道内电缆巡检机器人,其特征在于:所述驱动电机(113)及滚轮(112)设置在两所述侧支板(111)朝向彼此的一侧,所述驱动电机(113)通过同步带传动结构(114)与所述滚轮(112)传动连接,所述同步带传动结构(114)设置在两所述侧支板(111)远离彼此的另一侧。
9.根据权利要求1所述的一种管道内电缆巡检机器人,其特征在于:所述无线通信模块包括sx1278无线模块和rm500u 5g模块,所述中央处理器为rk3588芯片,所述运动控制器为stm32h750xbh6芯片。
技术总结
一种管道内电缆巡检机器人,涉及电缆巡检设备技术领域,所采用的技术方案包括移动装置、图像采集装置、通信装置、控制模块;移动装置包括左支架、右支架以及连接支架,左支架、右支架均包括侧支板、滚轮以及驱动电机,连接支架包括第一连接座、第二连接座以及连杆;图像采集装置包括图像传感器;通信装置包括无线通信模块以及天线;控制模块包括中央处理器。本技术利用图像传感器完成图像采集,通过控制模块、通信装置完成与服务器端的通信,控制模块还能通过驱动电机控制机器人的移动,共同完成电缆巡检作业;左支架和右支架分别与管道两侧管壁接触,对机器人形成侧支撑,使机器人处于电缆上方,避免与电缆直接接触产生摩擦留下安全隐患。
技术研发人员:李俊,张盈盈,陈荣,李林珅,杨文旭,吕明,黄林,温佳维,胡杨,任可,杨世豪
受保护的技术使用者:四川水利职业技术学院
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!