充电座及机器人的制作方法
本技术涉及机器人,具体而言,涉及一种充电座及机器人。
背景技术:
1、目前,市面上的泳池机器人的充电方式大体可分为两类,一种是电缆与机器控制盒直接连接,以进行供电;另一种是机器人内置电池,在需要充电时通过外接电缆或充电座进行充电。
2、对于内置电池的泳池机器人,相关技术中所配置的充电座的功能较为单一,仅能够初步满足充电需求,没有考虑操作的便携性和其他的扩展需求。
技术实现思路
1、本实用新型的主要目的在于提供一种充电座及机器人,以解决相关技术中的对于内置电池的泳池机器人所配置的充电座的没有考虑充电操作的便携性的问题。
2、为了实现上述目的,根据本实用新型的一实施例,提供了一种充电座,包括:支撑座,支撑座用于放置在支撑基面上,支撑座用于放置机器人的机器人本体;电接触组件,电接触组件设置在支撑座上,以用于与机器人本体上的导电片导电接触;其中,在机器人本体放置在支撑座上的情况下,机器人本体的把手与重心之间的连线垂直于支撑基面。
3、进一步地,支撑座上设置有用于与机器人本体的不同位置接触的第一支撑面和第二支撑面,第二支撑面与支撑基面之间的夹角为锐角;支撑座包括相连接的第一支撑部和第二支撑部,第一支撑部平行于支撑基面,第二支撑部与支撑基面间的夹角为锐角;第一支撑面为第一支撑部上的远离支撑基面的第一表面的一部分,第二支撑面为第二支撑部上的远离支撑基面的第二表面的一部分;其中,电接触组件设置在第二支撑部上。
4、进一步地,支撑座包括后盖和支撑主体,支撑主体包括相连接的第一主体部和第二主体部,第一主体部用于形成第一支撑部,第二主体部位于后盖上方且与后盖连接以共同组成第二支撑部。
5、进一步地,支撑座上设置有避让槽,避让槽位于第一支撑面和第二支撑面之间,且避让槽自上而下贯穿支撑座设置。
6、进一步地,第一支撑部上的靠近第二支撑部的第三表面的一部分用于形成避让槽的第一个槽侧面,第二支撑部上的靠近第一支撑部的第四表面的一部分用于形成避让槽的第二个槽侧面,第一个槽侧面和第二个槽侧面相对设置。
7、进一步地,第一支撑部和第二支撑部之间的夹角为锐角,充电座包括支腿,支腿位于第二支撑部的靠近支撑基面的一侧,以用于支撑第二支撑部;其中,支腿与第二支撑部之间可拆卸地连接。
8、进一步地,支腿包括第一支腿表面和第二支腿表面和第三支腿表面,第一支腿表面平行于支撑基面以用于与支撑基面接触,第二支腿表面平行于第二支撑部的靠近支撑基面的一侧的第五表面以用于与第二支撑部接触,第三支腿表面与支撑基面之间呈预定夹角设置且位于第一支腿表面的远离第二支撑部的一侧;其中,当第三支腿表面与墙壁面接触时,支撑座与墙壁面之间间隔设置,以形成间隙。
9、进一步地,第二支撑部与支撑基面间的夹角为50度至70度。
10、进一步地,充电座还包括:操控器,支撑座上设置有用于放置操控器的收纳腔;和/或电源板组件,电源板组件设置在支撑座内且与电接触组件电连接。
11、根据本实用新型的另一方面,提供了一种机器人,包括:机器人本体;上述的充电座,当机器人本体放置在充电座上时,充电座用于对机器人本体进行充电。
12、应用本实用新型的技术方案,本实用新型的充电座包括:支撑座,支撑座用于放置在支撑基面上,支撑座上设置有用于与机器人本体的不同位置接触的第一支撑面和第二支撑面,第二支撑面与支撑基面之间的夹角为锐角;电接触组件,电接触组件设置在支撑座上,以用于与机器人本体上的导电片导电接触;电源板组件,电源板组件设置在支撑座内且与电接触组件电连接;其中,机器人本体的与第二支撑面接触的位置为当机器人本体放置在支撑基面上时机器人本体的与支撑基面接触的一侧,以使得在机器人本体放置在支撑座上的情况下,机器人本体的把手与重心之间的连线垂直于支撑基面。这样,本实用新型对充电座进行了优化,当机器人本体放置在充电座上时,会与支撑基面保持一个合适的倾斜角度,使得机器上的机器人本体的把手与重心的连线恰好与支撑基面垂直,以当用户从充电座上提起机器人本体时,处于稳定的受力状态,不会另外产生偏转力矩,且当需要充电时用户将通过把手提取的机器直接下放在充电座上即可,从而改善了对机器人本体进行提起与放置的操作体验,解决了相关技术中的对于内置电池的泳池机器人所配置的充电座的没有考虑充电操作的便携性的问题。
技术特征:
1.一种充电座,其特征在于,包括:
2.根据权利要求1所述的充电座,其特征在于,
3.根据权利要求2所述的充电座,其特征在于,所述支撑座(1)包括后盖(101)和支撑主体(102),所述支撑主体(102)包括相连接的第一主体部(1021)和第二主体部(1022),所述第一主体部(1021)用于形成所述第一支撑部(11),所述第二主体部(1022)位于所述后盖(101)上方且与所述后盖(101)连接以共同组成所述第二支撑部(12)。
4.根据权利要求3所述的充电座,其特征在于,所述支撑座(1)上设置有避让槽(103),所述避让槽(103)位于所述第一支撑面(111)和所述第二支撑面(112)之间,且所述避让槽(103)自上而下贯穿所述支撑座(1)设置。
5.根据权利要求4所述的充电座,其特征在于,所述第一支撑部(11)上的靠近所述第二支撑部(12)的第三表面的一部分用于形成所述避让槽(103)的第一个槽侧面,所述第二支撑部(12)上的靠近所述第一支撑部(11)的第四表面的一部分用于形成所述避让槽(103)的第二个槽侧面,所述第一个槽侧面和所述第二个槽侧面相对设置。
6.根据权利要求2所述的充电座,其特征在于,所述第一支撑部(11)和所述第二支撑部(12)之间的夹角为锐角,所述充电座包括支腿(4),所述支腿(4)位于所述第二支撑部(12)的靠近所述支撑基面(100)的一侧,以用于支撑所述第二支撑部(12);其中,所述支腿(4)与所述第二支撑部(12)之间可拆卸地连接。
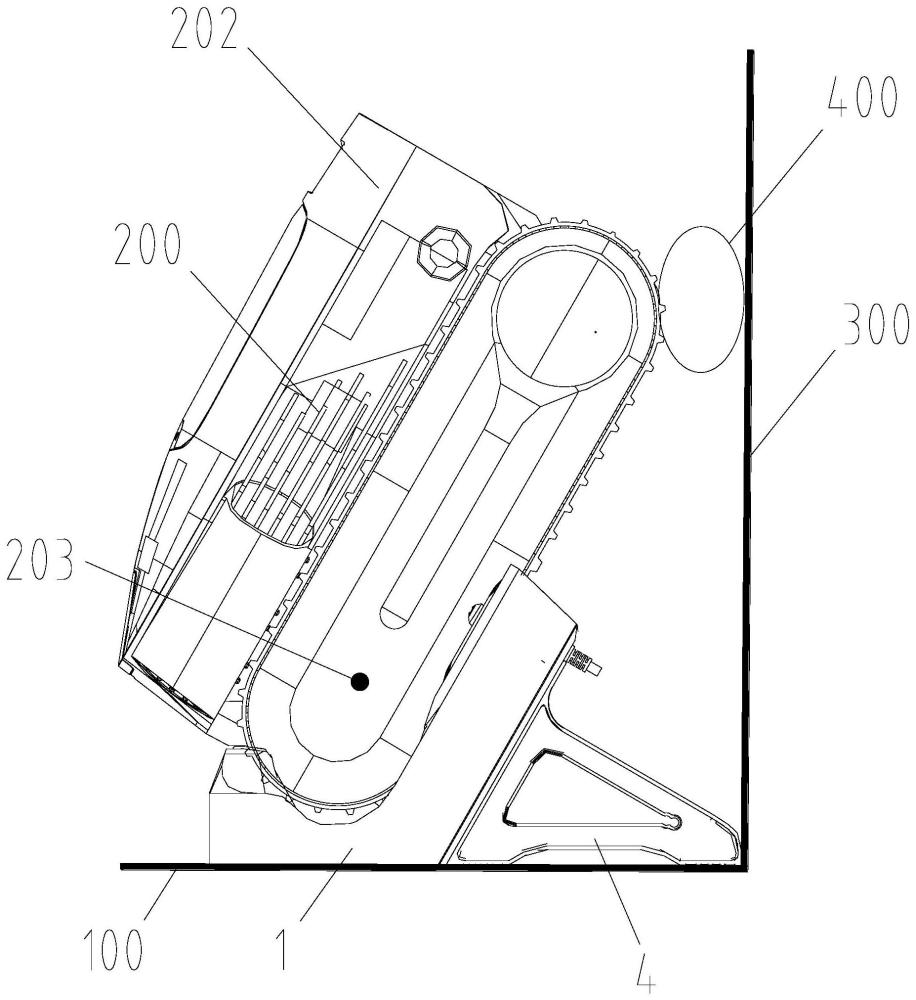
7.根据权利要求6所述的充电座,其特征在于,所述支腿(4)包括第一支腿表面(41)和第二支腿表面(42)和第三支腿表面(43),所述第一支腿表面(41)平行于所述支撑基面(100)以用于与所述支撑基面(100)接触,所述第二支腿表面(42)平行于所述第二支撑部(12)的靠近所述支撑基面(100)的一侧的第五表面以用于与所述第二支撑部(12)接触,所述第三支腿表面(43)与所述支撑基面(100)之间呈预定夹角设置且位于所述第一支腿表面(41)的远离所述第二支撑部(12)的一侧;其中,当所述第三支腿表面(43)与墙壁面(300)接触时,所述支撑座(1)与所述墙壁面(300)之间间隔设置,以形成间隙(400)。
8.根据权利要求2所述的充电座,其特征在于,所述第二支撑部(12)与所述支撑基面(100)间的夹角为50度至70度。
9.根据权利要求1所述的充电座,其特征在于,所述充电座还包括:
10.一种机器人,其特征在于,包括:
技术总结
本技术提供了一种充电座及机器人,充电座包括:支撑座,支撑座用于放置在支撑基面上,支撑座用于放置机器人的机器人本体;电接触组件,电接触组件设置在支撑座上,以用于与机器人本体上的导电片导电接触;其中,在机器人本体放置在支撑座上的情况下,机器人本体的把手与重心之间的连线垂直于支撑基面,以解决相关技术中的对于内置电池的泳池机器人所配置的充电座的没有考虑充电操作的便携性的问题。
技术研发人员:张石磊
受保护的技术使用者:星迈创新科技(苏州)有限公司
技术研发日:20230714
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!