一种巡线机器人用走线机构
本技术主要涉及巡线机器人,具体涉及一种巡线机器人用走线机构。
背景技术:
1、输电线路架设在空中,需要顶起对其进行巡视检查,目前采用人工巡检的作业方式,需要作业人员在输电线路上行走和攀爬,存在作业效率低和安全性低的问题,目前技术升级后采用巡检机器人,能够取代人工进行巡检。
2、现有巡线机器人多为高压输电线路开发制作,因高压输电线路的电缆的高抗拉和高负荷能力,其能够承受巡线机器人的结构重量,在对郊区民用供电线缆进行巡线作业时,现有的巡线机器人结构重量较大,导致民用供电线缆无法承托巡线机器人。
3、发明人提出一种巡线机器人用走线机构,其通过升力风扇的结构辅助设计,避免巡线机器人在巡线作业中对线缆造成过度牵拉。
技术实现思路
1、 1.实用新型解决的技术问题
2、本实用新型提供了一种巡线机器人用走线机构,解决了现有巡线机器人重量过大导致民用供电线缆无法承载的问题。
3、 2.技术方案
4、为达到上述目的,本实用新型提供的技术方案为:一种巡线机器人用走线机构,包括如下结构:
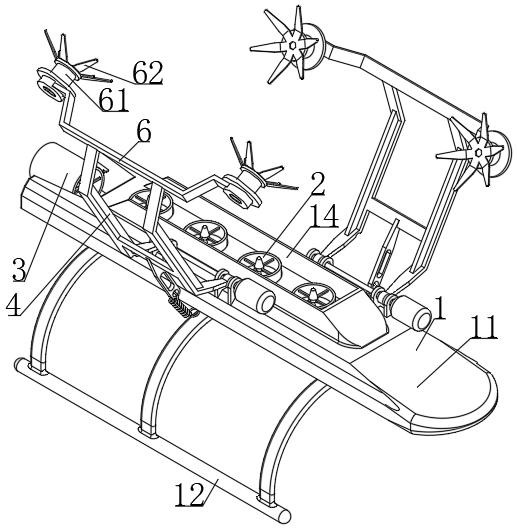
5、机体,所述机体的中部等间距固设有垂直涵道风扇,该机体的后端固设有水平涵道风扇。
6、 h形上支臂,所述h形上支臂关于机体的中部对称设置,所述h形上支臂的中部和顶部分别固设有防脱连杆和桁架。
7、进一步的,所述机体的前端内侧和后端内侧分别固设有前机舱和后机舱,所述机体的底端卡接有碳纤维支脚,所述机体的顶部固设有挡片,所述挡片的顶部高度高于垂直涵道风扇的顶部高度,所述机体的顶部左右两侧均焊接有鞍座。
8、进一步的,所述h形上支臂的底端固设有轴杆,该轴杆的前端和后端与鞍座的顶端内侧活动连接,所述轴杆的前端固设有调节电机,该调节电机的外侧与机体的外侧固定连接。
9、进一步的,所述防脱连杆的底部卡接有防脱弹簧,该防脱弹簧的底端与机体的外侧卡接。
10、进一步的,所述桁架的顶部前侧和后侧均活动连接有转轮,所述转轮的外侧固设有爪片。
11、 进一步的,所述桁架的外侧固设有电机架,所述电机架的中部固设有驱动电机,所述驱动电机的输出端与转轮的中部固定连接。
12、 3.有益效果
13、采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
14、本实用新型提供了一种巡线机器人用走线机构,鞍座和轴杆配合,为h形上支臂提供安装支撑,调节电机和轴杆配合,完成h形上支臂的工作位置调整,通过转轮和爪片的配合,完成本装置在电路线缆上的悬挂设置,完成本装置在电路线缆上的装配进行巡检工作,水平涵道风扇将本装置在水平方向上推进,其中机体和垂直涵道风扇配合,垂直涵道风扇工作将机体向上推动,避免设备因重量过大导致民用供电线缆无法承载的情况出现;
15、本实用新型提供了一种巡线机器人用走线机构,防脱连杆和防脱弹簧的设计,在调节电机故障无法使用的过程中,防脱弹簧通过防脱连杆带动h形上支臂向机体的外侧偏转,避免h形上支臂因机体的结构重量限制,导致h形上支臂和桁架配合转轮带动两条电路线缆距离拉近;
16、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
技术特征:
1.一种巡线机器人用走线机构,其特征在于:包括如下结构:
2.根据权利要求1所述的一种巡线机器人用走线机构,其特征在于:所述机体(1)的前端内侧和后端内侧分别固设有前机舱(11)和后机舱,所述机体(1)的底端卡接有碳纤维支脚(12),所述机体(1)的顶部固设有挡片(13),所述挡片(13)的顶部高度高于垂直涵道风扇(2)的顶部高度,所述机体(1)的顶部左右两侧均焊接有鞍座(14)。
3.根据权利要求1所述的一种巡线机器人用走线机构,其特征在于:所述h形上支臂(4)的底端固设有轴杆(41),该轴杆(41)的前端和后端与鞍座(14)的顶端内侧活动连接,所述轴杆(41)的前端固设有调节电机(42),该调节电机(42)的外侧与机体(1)的外侧固定连接。
4.根据权利要求1所述的一种巡线机器人用走线机构,其特征在于:所述防脱连杆(5)的底部卡接有防脱弹簧(51),该防脱弹簧(51)的底端与机体(1)的外侧卡接。
5.根据权利要求1所述的一种巡线机器人用走线机构,其特征在于:所述桁架(6)的顶部前侧和后侧均活动连接有转轮(61),所述转轮(61)的外侧固设有爪片(62)。
6.根据权利要求1-5任一项所述的一种巡线机器人用走线机构,其特征在于:所述桁架(6)的外侧固设有电机架(7),所述电机架(7)的中部固设有驱动电机(8),所述驱动电机(8)的输出端与转轮(61)的中部固定连接。
技术总结
本技术提供了一种巡线机器人用走线机构,包括如下结构:机体,所述机体的中部等间距固设有垂直涵道风扇,该机体的后端固设有水平涵道风扇;H形上支臂,所述H形上支臂的中部和顶部分别固设有防脱连杆和桁架,鞍座和轴杆配合,为H形上支臂提供安装支撑,调节电机和轴杆配合,完成H形上支臂的工作位置调整,通过转轮和爪片的配合,完成本装置在电路线缆上的悬挂设置,水平涵道风扇将本装置在水平方向上推进,其中机体和垂直涵道风扇配合,垂直涵道风扇工作将机体向上推动,避免设备因重量过大导致民用供电线缆无法承载的情况出现,解决现有巡线机器人重量过大导致民用供电线缆无法承载的问题。
技术研发人员:王越
受保护的技术使用者:安徽信息工程学院
技术研发日:20230720
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!