输出齿轮旋转角度的控制组件及使用其的步进电机的制作方法
本技术涉及电机,尤其涉及一种输出齿轮旋转角度的控制组件及使用其的步进电机。
背景技术:
1、常见的步进电机中采用的控制系统,其大致实施原理为:由控制系统的控制板控制驱动步进电机的脉冲,从而控制电机的旋转角度,进而来控制输出齿轮的旋转角度。在此过程中,电机在控制板的作用下产生的旋转角度因固定的脉冲而无法根据不同的使用需求来进行调整,也就是说常规技术中的步进电机运行过程中的旋转角度无法精确控制,故而对应所能适应的应用场景也同样受到限制。
2、基于上述情况,为了解决现有技术中使用的步进电机驱动齿轮旋转的情况下难以精确实现其角度的控制,公布号为cn115498824a公开的一种动能执行器及工作方法,其通过光码盘与光电传感器的配合,通过光电传感器来检测光码盘的转动监督,而监测光码盘转动的角度即可准确获得电机转动的角度。也就是说该公开技术中的电机在光码盘的作用下可以实现对其转动角度的控制,因此其可以适用的场景的范围也同步扩大了。而从该动能执行器的整体结构来说,其需要单独设置的光码盘来实现对于电机旋转角度的检测,此光码盘的设计一方面会增加本身的执行器的生产成本,另一方面还需要对于电机的结构进行改进,使得该电机一端可以驱动齿轮箱运转,另一端驱动光码盘旋转,即需要在电机的两个轴侧端均配置有动力输出轴,此结构下的电机比单独在其一端配置动力输出轴的情况来说,整体电机的体积会增大,故而对于上述公开技术中的动能执行器,无论是单独设计的光码盘还是电机结构本身都会使得整体的动能执行机构体积和尺寸变大,从而使得这种动能执行机构无法适用于部分安装空间相对受限的应用场景。
技术实现思路
1、本实用新型的第一目的是提供一种输出齿轮旋转角度的控制组件,以解决对输出齿轮的不同旋转角度进行精确调控的技术问题。
2、本实用新型的第二目的是提供一种步进电机,以解决提高其对于不同应用场景的适用性的技术问题。
3、本实用新型的输出齿轮旋转角度的控制组件是这样实现的:
4、一种输出齿轮旋转角度的控制组件,包括:
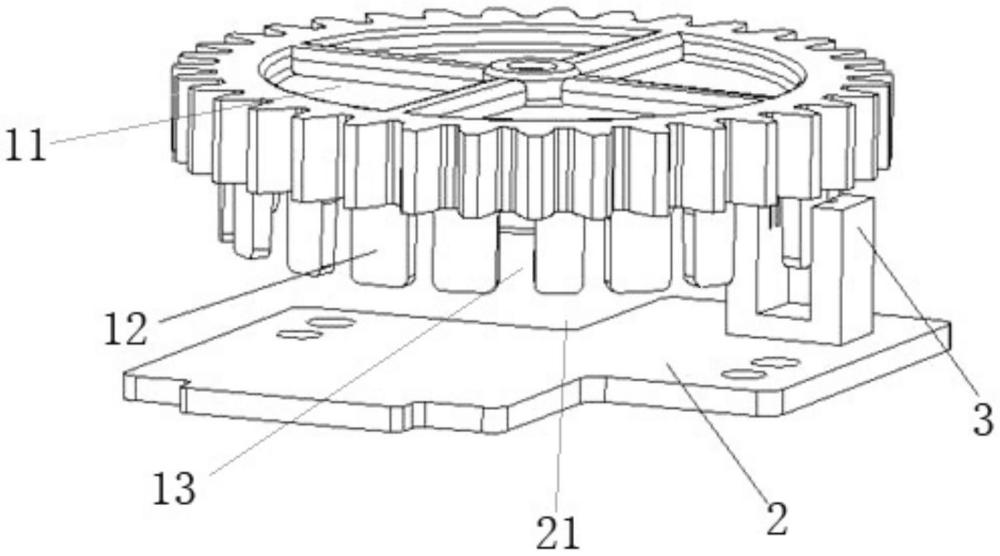
5、输出齿轮,其包括轮盘和位于轮盘的一个轴侧端的且沿圆周方向间隔分布的多个凸翅;每相邻的两个凸翅之间均形成有透光口;
6、控制板组,其包括控制板和设于控制板上的光电传感器;所述光电传感器中预设有适于多个凸翅依次插入的凹槽。
7、在本实用新型可选的实施例中,多个所述凸翅沿轮盘的圆周方向呈均匀分布结构。
8、在本实用新型可选的实施例中,每个凸翅相对于轮盘均为凸起设置的结构;以及
9、所述透光口为形成在相邻的凸翅之间的缺槽口。
10、在本实用新型可选的实施例中,多个所述凸翅以及位于相邻凸翅之间的透光口一体加工成形为环形结构体。
11、在本实用新型可选的实施例中,所述凹槽包括沿轮盘的径向分布的一对槽侧板;且该凹槽垂直于一对槽侧板的一对侧端面均为适于凸翅进出凹槽的缺口。
12、在本实用新型可选的实施例中,在一对槽侧板中其中一个槽侧板的内壁上设有光发射器,且在另一个槽侧板的内壁上设有用于接收光发射器发出光线的光接收器。
13、在本实用新型可选的实施例中,所述光发射器发出光线的宽度小于凸翅沿轮盘的圆周方向的宽度;以及
14、所述光发射器发出光线的宽度还小于透光口沿轮盘的圆周方向的宽度。
15、在本实用新型可选的实施例中,每个所述凸翅均为尺寸相同的矩形片状体;以及
16、每个所述凹槽的槽形状为矩形槽。
17、在本实用新型可选的实施例中,每个所述凸翅沿轮盘轴向的长度均相同;
18、每个所述凸翅沿轮盘轴向的长度小于凹槽沿轮盘轴向的深度。
19、在本实用新型可选的实施例中,每个所述凸翅沿轮盘径向的厚度均相同;
20、每个所述凸翅沿轮盘径向的厚度均小于凹槽沿轮盘径向的槽口尺寸。
21、本实用新型的步进电机是这样实现的:
22、一种步进电机,包括:外壳体和设于外壳体中的电机组件、与电机组件相连的齿轮传动组件,以及与所述齿轮传动组件相连的所述的输出齿轮旋转角度的控制组件;其中
23、所述输出齿轮旋转角度的控制组件的控制板与电机组件电连接。
24、在本实用新型可选的实施例中,所述控制板上形成有适于对连接输出齿轮的轮盘的轴体进行让位的让位口。
25、采用了上述技术方案,本实用新型具有以下的有益效果:本实用新型的输出齿轮旋转角度的控制组件及使用其的步进电机,通过在输出齿轮上设有的沿圆周方向均匀分布的凸翅,以及控制板上的光电传感器,当凹槽中的光发射器和光接收器之间没有受到凸翅的隔挡时,光发射器发出的光线不受阻碍,则光接收器可接收到光线,从而将其转化为电信号反馈到控制板,再由控制板来控制电机组件的运行状态。如此结构下,随着输出齿轮的旋转,不同的凸翅依次进入到凹槽中再依次离开凹槽,从而可以实现对于输出齿轮在任意旋转角度下的精确检测,由此来使得本实用新型的步进电机可满足不同的应用场景的使用需求。
技术特征:
1.一种输出齿轮旋转角度的控制组件,其特征在于,包括:
2.根据权利要求1所述的输出齿轮旋转角度的控制组件,其特征在于,多个所述凸翅沿轮盘的圆周方向呈均匀分布结构。
3.根据权利要求1或2所述的输出齿轮旋转角度的控制组件,其特征在于,每个凸翅相对于轮盘均为凸起设置的结构;以及
4.根据权利要求1或2所述的输出齿轮旋转角度的控制组件,其特征在于,多个所述凸翅以及位于相邻凸翅之间的透光口一体加工成形为环形结构体。
5.根据权利要求1或2所述的输出齿轮旋转角度的控制组件,其特征在于,所述凹槽包括沿轮盘的径向分布的一对槽侧板;且该凹槽垂直于一对槽侧板的一对侧端面均为适于凸翅进出凹槽的缺口。
6.根据权利要求5所述的输出齿轮旋转角度的控制组件,其特征在于,在一对槽侧板中其中一个槽侧板的内壁上设有光发射器,且在另一个槽侧板的内壁上设有用于接收光发射器发出光线的光接收器。
7.根据权利要求6所述的输出齿轮旋转角度的控制组件,其特征在于,所述光发射器发出光线的宽度小于凸翅沿轮盘的圆周方向的宽度;以及
8.根据权利要求1或2所述的输出齿轮旋转角度的控制组件,其特征在于,每个所述凸翅均为尺寸相同的矩形片状体;以及
9.根据权利要求1或2所述的输出齿轮旋转角度的控制组件,其特征在于,每个所述凸翅沿轮盘轴向的长度均相同;
10.根据权利要求9所述的输出齿轮旋转角度的控制组件,其特征在于,每个所述凸翅沿轮盘径向的厚度均相同;
11.一种步进电机,其特征在于,包括外壳体和设于外壳体中的电机组件、与电机组件相连的齿轮传动组件,以及与所述齿轮传动组件相连的如权利要求1~10任一项所述的输出齿轮旋转角度的控制组件;其中
12.根据权利要求11所述的步进电机,其特征在于,所述控制板上形成有适于对连接输出齿轮的轮盘的轴体进行让位的让位口。
技术总结
本技术公开了一种输出齿轮旋转角度的控制组件及使用其的步进电机,包括:输出齿轮,其包括轮盘和位于轮盘的一个轴侧端的且沿圆周方向间隔分布的多个不透光的凸翅;每相邻的两个凸翅之间均形成有透光口;控制板组,其包括控制板和设于控制板上的光电传感器;光电传感器中预设有适于多个凸翅依次插入的凹槽。本技术可以提高其对于不同应用场景的适用性。
技术研发人员:王富冈,陶伟,王嘉鑫,冯佳慧
受保护的技术使用者:江苏雷利电机股份有限公司
技术研发日:20230811
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!