桌面机器人的充电桩、桌面机器人的充电装置的制作方法
本技术涉及机器人,具体涉及一种桌面机器人的充电桩以及一种桌面机器人的充电装置。
背景技术:
1、随着科学技术的不断进步和机器人技术的不断发展,智能机器人已逐渐走入千家万户,市场上也出现了不少智能机器人给人们的生活带来便利和乐趣,其中,桌面机器人作为智能机器人的一种,侧重于情感交互和陪伴娱乐。
2、目前,桌面机器人设定有特定的充电桩,用以在桌面机器人处于缺电状态时停靠进行充电工作;现存在方案:将充电桩在地图中的位置信息发送至机器人,机器人计算停靠位置并移动至该停靠位置,但该方法中经常会出现充电桩实际位置与地图上位置不一致或有误差的问题,导致机器人定位精度不高,不利于保证机器人回充的成功率。
3、因此,有必要提供一种新方式来解决上述技术问题。
技术实现思路
1、针对现有技术的不足之处,本实用新型的目的在于提供一种桌面机器人的充电桩,能够帮助机器人分析确定机器人相对充电桩的正确方位,从而使得机器人快速准确的对准充电桩方向以移动至目标位置进行充电,提高定位精度,有利于增加机器人充电成功率,并确保整个自动充电过程的安全性。
2、本实用新型的技术方案概述如下:
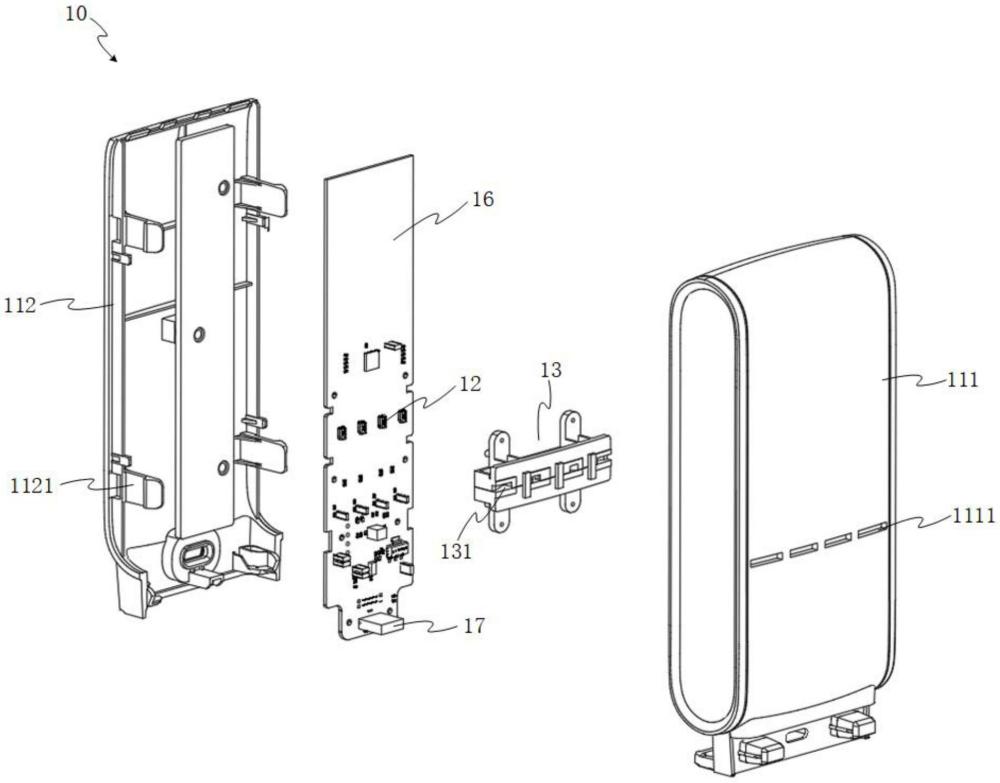
3、一种桌面机器人的充电桩,包括:
4、桩体;
5、若干发射装置,其与所述桩体内的控制电路板电连接,用以发射红外信号;
6、导光部件,其安装于所述桩体内并罩设于若干所述发射装置上,用以将所述红外信号导向所述桩体外部;
7、其中,若干所述红外信号经所述导光部件遮光与分光后形成若干个独立信号覆盖区,并共同组成围绕所述桩体中部的信号带,实现桌面机器人与充电桩相对位置的判定。
8、优选的,所述信号带的覆盖范围为150°-180°。
9、优选的,所述导光部件形成有与若干所述发射装置相对应的若干个导光通道,用以分别引导对应的红外信号。
10、优选的,若干所述导光通道具备不同的形状,以限制所述红外信号的发射角度。
11、优选的,所述导光部件开设有四个所述导光通道,用以形成四个独立的信号覆盖区。
12、优选的,若干所述信号覆盖区互不重叠。
13、优选的,所述桩体开设有透光槽,所述透光槽位置与所述导光通道相对应,且所述透光槽上覆盖有红外透过膜。
14、优选的,所述导光部件端面设置有遮光件,且所述遮光件围绕所述导光通道布设;所述导光部件与所述桩体安装时,所述遮光件与所述桩体内侧壁抵接。
15、另一方面,本实用新型还提供一种桌面机器人的充电装置,包括如上所述的桌面机器人的充电桩以及充电板;其中,
16、所述充电板上设置有充电插孔,所述充电桩上对应位置设置有充电插头,通过所述充电插孔与所述充电插头对接以将所述充电板与所述充电桩连接;
17、所述充电板内部设置有无线充电模块,用于在桌面机器人移动至目标位置时,基于所述无线充电模块对桌面机器人进行充电。
18、优选的,所述充电板底部配置有充电板负载,防止桌面机器人移动到充电板上时发生窜动。
19、相比现有技术,本实用新型的有益效果在于:
20、本实用新型提供一种桌面机器人的充电桩,其利用多个发射装置独立发射红外信号,对应红外信号经导光部件导出后形成围绕桩体中部的若干个独立信号覆盖区,与桌面机器人中的红外接收结构相互配合,在红外接收结构接收到发射装置所发射的红外信号时,可以根据所接收到的红外信号中包括的发射装置的标识,确定桌面机器人所在的信号覆盖区,根据桌面机器人所在的信号覆盖区控制桌面机器人移动至充电桩;即不同方位的若干个独立的信号覆盖区设置能够帮助机器人分析确定机器人相对充电桩的正确方位,从而使得机器人快速准确的移动至目标位置以进行充电,提高定位精度,有利于增加机器人充电成功率,实现机器人自动定位充电桩并进行充电,确保整个自动充电过程的安全性。
21、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种桌面机器人的充电桩,其特征在于,包括:
2.如权利要求1所述的桌面机器人的充电桩,其特征在于:所述信号带的覆盖范围为150°-180°。
3.如权利要求1所述的桌面机器人的充电桩,其特征在于:所述导光部件形成有与若干所述发射装置相对应的若干个导光通道,用以分别引导对应的红外信号。
4.如权利要求3所述的桌面机器人的充电桩,其特征在于:若干所述导光通道具备不同的形状,以限制所述红外信号的发射角度。
5.如权利要求4所述的桌面机器人的充电桩,其特征在于:所述导光部件开设有四个所述导光通道,用以形成四个独立的信号覆盖区。
6.如权利要求1所述的桌面机器人的充电桩,其特征在于:若干所述信号覆盖区互不重叠。
7.如权利要求3所述的桌面机器人的充电桩,其特征在于:所述桩体开设有透光槽,所述透光槽位置与所述导光通道相对应,且所述透光槽上覆盖有红外透过膜。
8.如权利要求3所述的桌面机器人的充电桩,其特征在于:所述导光部件端面设置有遮光件,且所述遮光件围绕所述导光通道布设;所述导光部件与所述桩体安装时,所述遮光件与所述桩体内侧壁抵接。
9.一种桌面机器人的充电装置,其特征在于,包括如权利要求1所述的桌面机器人的充电桩以及充电板;其中,
10.如权利要求9所述的桌面机器人的充电装置,其特征在于:所述充电板底部配置有充电板负载,防止桌面机器人移动到充电板上时发生窜动。
技术总结
本技术公开了一种桌面机器人的充电桩,包括:桩体;若干发射装置,其与桩体内的控制电路板电连接,用以发射红外信号;导光部件,其安装于桩体内并罩设于若干发射装置上,用以将红外信号导向桩体外部;其中,若干红外信号经导光部件遮光与分光后形成若干个独立信号覆盖区,并共同组成围绕桩体中部的信号带,实现桌面机器人与充电桩相对位置的判定。本技术还涉及一种桌面机器人的充电装置。本技术能够帮助机器人分析确定机器人相对充电桩的正确方位,从而使得机器人快速准确移动至目标位置进行充电,提高定位精度,有利于增加机器人充电成功率,并确保整个自动充电过程的安全性。
技术研发人员:李明,周翔
受保护的技术使用者:北京人和家科技有限公司
技术研发日:20230829
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!