一种永磁同步电机的超局部模型预测电流控制方法及系统
本发明涉及永磁同步电机的控制,具体涉及一种永磁同步电机的超局部模型预测电流控制方法及系统。
背景技术:
1、由于永磁同步电机具有功率密度高、效率高、转矩特性好等优势,已成为电动汽车的主流电机。而且我国稀土资源丰富,在成本上具有优势。由于磁阻转矩和较宽的调速范围,永磁同步电机在电动汽车中大量采用,对牵引驱动系统的良好性能(例如,高动态、受限电流和强调速能力)提出了强烈要求。
2、目前,永磁同步电机系统的主要控制策略是磁场定向控和直接转矩控制(dtc)。然而,用于矢量控制的pi控制器在要求无超调和高动态性能的驱动应用中仍然存在不足,而直接转矩控制则存在转矩波动大的问题。模型预测控制(mpc)因其简单的实现、直接处理非线性和约束以及良好的动态性能而受到越来越多的关注。mpc方法成为先进车辆动态实时控制的可行解决方案。现有技术(zhou y, li h, zhang h. model-free deadbeatpredictive current control of a surface-mounted permanent magnet synchronousmotor drive system [j]. journal of power electronics, 2018, 18(1): 103-15.)提出了一种超局部模型预测电流控制方法(ul-pcc),该方法(ul-pcc)利用速度环的输入输出变量建立包含非物理比例因子的超局部模型,然后基于超局部模型预测来进行模型预测控制(mpc),实验证明该方法具有较强的鲁棒性和抗干扰性。该方法(ul-pcc)中超局部模型的非物理比例因子的值通常取电机电感的倒数,在电机电感值未知的情况下,文献(chenj, fan y, cheng m, et al. parameter-free ultralocal model-based deadbeatpredictive current control for pmvms using finite-time gradient method [j].ieee transactions on industrial electronics, 2023, 70(6): 5549-59.)通过向d轴中注入低幅值的方波电流,通过采样得到的电流值与电流参考值的对比来判断非物理比例因子的取值,该方法实现原理简单。但是,由于注入的电流只能存在于d轴,即只能算出d轴下的非物理比例因子的值,不适合于d轴和q轴电感值不同的内置式永磁同步电机,而且需要精确的电流采样值,抗干扰能力弱,注入的d轴电流会影响到电机的磁链,对电流谐波造成一定的干扰。
技术实现思路
1、本发明要解决的技术问题:针对现有技术的上述问题,提供一种永磁同步电机的超局部模型预测电流控制方法及系统,本发明旨在解决传统基于超局部模型的预测电流控制方法(ul-pcc)对电机的电感值有很强的依赖性、电感值的变化和电感参数的不精确会影响电机控制的性能的问题,实现在不需要永磁同步电机的任何参数下的稳定控制。
2、为了解决上述技术问题,本发明采用的技术方案为:
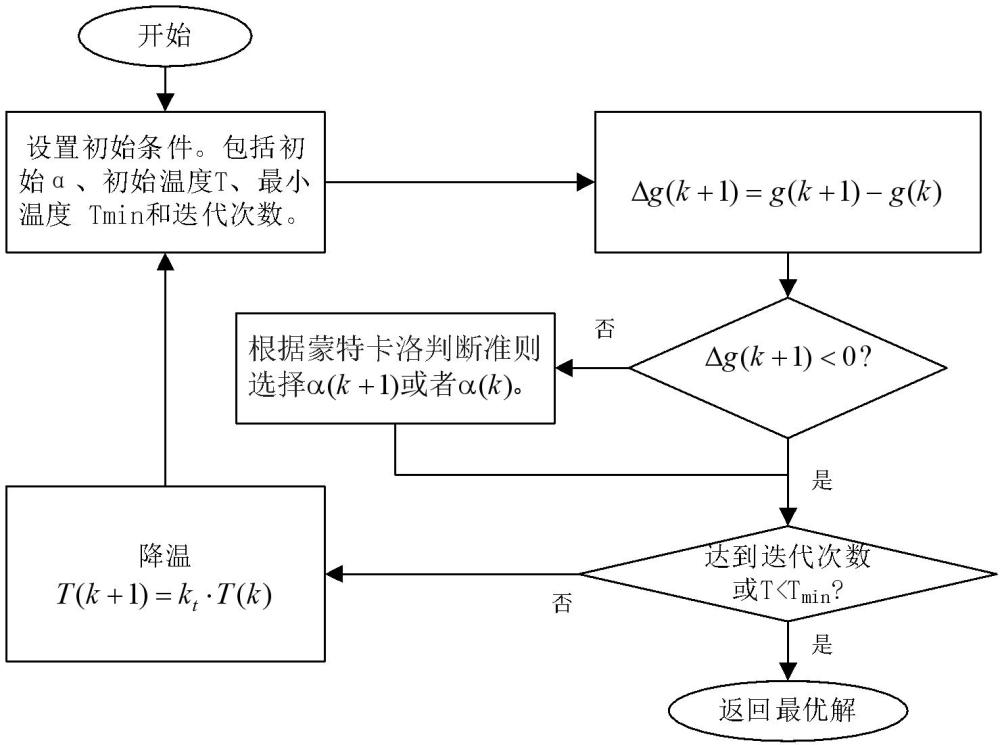
3、一种永磁同步电机的超局部模型预测电流控制方法,包括在进行超局部模型预测电流控制时,采用下述模拟退火算法优化超局部模型的非物理比例因子:
4、s101,设置初始条件,包括初始的非物理比例因子、降温系数、初始温度t、最小温度、最大迭代次数和迭代变量;
5、s102,将第k次迭代的非物理比例因子加上一个随机扰动量得到第k+1次迭代的非物理比例因子,计算第k+1次迭代的变化量,其中为第k+1次迭代的非物理比例因子对应的代价函数,为第k次迭代的非物理比例因子对应的代价函数;
6、s103,判断第k+1次迭代的变化量小于0是否成立,若成立则跳转步骤s104,否则根据蒙特卡洛判断准则在第k+1次迭代的非物理比例因子、第k次迭代的非物理比例因子选择一个作为最优的非物理比例因子;
7、s104,若迭代变量等于最大迭代次数或者当前的温度t小于最小温度,若不成立,则将第k次迭代的温度t结合降温系数进行退火得到第k+1次迭代的温度t,将迭代变量加1,跳转步骤s102;否则,将最优的非物理比例因子作为最终得到的最优的非物理比例因子,结束并退出。
8、可选地,所述代价函数的函数表达式为:
9、,
10、上式中,和分别为第k+1次迭代的非物理比例因子对应的代价函数的d轴和q轴分量,和分别为第k次迭代的非物理比例因子对应的代价函数的d轴和q轴分量,为控制周期,和分别为第k次迭代时电流的d轴和q轴分量,和分别为第k次迭代时电流的d轴和q轴分量的参考值,且初始的非物理比例因子对应的代价函数的d轴和q轴分量为0。
11、可选地,步骤s103中根据蒙特卡洛判断准则在第k+1次迭代的非物理比例因子、第k次迭代的非物理比例因子选择一个作为最优的非物理比例因子时,具体是指设定的概率选择第k+1次迭代的非物理比例因子。
12、可选地,所述设定的概率的计算函数表达式为:
13、,
14、上式中,为第k+1次迭代的非物理比例因子对应的代价函数,为第k次迭代的非物理比例因子对应的代价函数,为迭代变量,t为当前的温度。
15、可选地,所述采用下述模拟退火算法优化超局部模型的非物理比例因子时,包括每求出一个新的非物理比例因子的值则对非物理比例因子执行指定时间长度的延迟以稳定电流。
16、可选地,所述超局部模型的函数表达式为:
17、,
18、上式中,和为第k+1次迭代的d轴和q轴电压分量的参考值,和分别为第k次迭代时电流的d轴和q轴分量,和分别为第k次迭代时电流的d轴和q轴分量的参考值,和分别为d轴和q轴的非物理比例因子,为控制周期,和分别为第k次迭代时扰动部分的d轴和q轴分量。
19、可选地,所述在进行超局部模型预测电流控制时,迭代时扰动部分的d轴和q轴分量的更新的函数表达式为:
20、,
21、,
22、上式中,和分别为第k次迭代时电流的d轴和q轴误差,和分别为第k次迭代时电流的观测值,和分别为第k次迭代时电流的d轴和q轴分量,和分别为第k+1次迭代时电流的观测值,和为第k次迭代时电压的d轴和q轴分量,和为误差反馈增益,和分别为第k+1次迭代时扰动部分的d轴和q轴分量。
23、可选地,所述第k+1次迭代时电流的观测值为通过状态扩张观测器观测得到,且所述状态扩张观测器的函数表达式为:
24、,
25、,
26、上式中,和分别为电流的d轴和q轴误差的d轴和q轴分量,和分别为d轴和q轴的电流估计值,和为电流的d轴和q轴实际值,和分别为和的微分,和分别为d轴和q轴下对扰动部分的估计值,即和,和分别为和的微分,和分别为d轴和q轴的非物理比例因子,为控制周期,和为电压的d轴和q轴分量,和为增益系数,且有,,且有:
27、,
28、上式中,为状态扩张观测器的带宽。
29、此外,本发明还提供一种永磁同步电机的超局部模型预测电流控制系统,包括相互连接的微处理器和存储器,所述微处理器被编程或配置以执行所述永磁同步电机的超局部模型预测电流控制方法。
30、此外,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序用于被微处理器编程或配置以执行所述永磁同步电机的超局部模型预测电流控制方法。
31、和现有技术相比,本发明主要具有下述优点:针对传统的基于超局部模型的预测电流控制(ul-pcc)方法对电机的电感值有很强的依赖性,电感值的变化和电感参数的不精确会影响电机控制的性能,本发明通过模拟退火算法在短时间内计算出超局部模型中的最佳系数,摆脱了传统的基于超局部模型的预测电流控制(ul-pcc)方法中对电感的依赖,实现了在不需要永磁同步电机的任何参数下的稳定控制,具有鲁棒性强、稳定可靠的优点。
- 还没有人留言评论。精彩留言会获得点赞!