一种内置式永磁同步电机自适应最大转矩电流比控制方法
本发明涉及交流电机控制技术,特别是涉及一种内置式永磁同步电机自适应最大转矩电流比控制方法。
背景技术:
1、内置式永磁同步电机因具有功率密度大、效率高、功率因数大和动态响应速度快等优点,已在轨道交通、新能源汽车等领域获得了广泛的应用。传统基于零d轴电流的电机矢量控制方法结构简单、易于实现,但其对于内置式永磁同步电机无法实现效率最大化。为了充分利用内置式永磁同步电机固有的磁阻转矩以提高功率密度与效率,学者提出了最大转矩电流比控制方法。最大转矩电流比控制,顾名思义即利用最小的电流输出与负载相匹配的电磁转矩,该方法要求电机的定子电流矢量角处于最优状态。因此,运行于最大转矩电流比控制模态的电机需要以实时计算最优电流矢量角的方式跟踪最优dq轴电流轨迹,以输出最低的定子电流幅值。然而,最优电流矢量角的求取过程中需要利用多个电机电磁参数,包括定子dq轴电感与永磁体磁链。为避免参数测量不准、外界环境干扰导致的参数摄动等因素对电机最大转矩电流比控制精度的影响,国内外学者针对最优矢量角的在线跟踪控制技术展开研究,并取得了一定的成果;现有方法可以分为基于参数在线辨识的方法、基于梯度寻优的方法以及基于信号注入的方法。
2、文献(j.xia,j.xu,y.huang,et al.parameter-estimation-based adaptivemtpa control for interior permanent magnet synchronous motors[c]//proceedingsof the 6th international conference on control,decision and informationtechnologies.ieee,2019:397-402)等提出的基于电磁参数在线辨识的最优电流轨迹跟踪算法是一种最为直接的方法,该方法通过实时辨识-更新电机电磁参数,校正最优矢量角计算公式中的误差。然而,电机的dq轴电感、永磁体磁链可能会同时发生摄动,额外采用高精度参数辨识策略同时辨识三种参数将消耗大量的工业数字微处理器内存资源,影响系统控制的实时性。文献(h.kim,y.lee,s.-k.sul,et al.online mtpa control of ipmsm basedon robust numerical optimization technique[j].ieee transactions on industryapplications,2019,55(4):3736-3746)等提出的基于梯度寻优的方法通常采用梯度下降法、levenberg-marquardt算法等成熟的最优化方法进行电流矢量角的在线寻优,但此类方法复杂的矩阵运算与迭代过程也会给其在电机驱动数字微处理器中的执行带来挑战。为了弥补上述两种方法的不足之处,文献(f.-j.lin,y.-t.liu,w.-a.yu.power perturbationbased mtpa with an online tuning speed controller for an ipmsm drive system[j].ieee transactions on industrial electronics,2018,65(5):3677-3687)等根据电机中的基本电磁关系,提出了基于信号注入法的最优电流轨迹跟踪策略。信号注入法从电流控制器向电流矢量角中注入一组高频正弦或方波信号,计算所注入信号的响应,经过一系列数学运算与数字滤波后,选取合理的控制器即可在线校正电流矢量角至最优。然而,信号注入法通常需要用到电机的其它精确参数,如定子电阻等,其在考虑电机多电磁参数摄动时的准确度仍有待提升;同时,该方法的工作过程中需要用到多个二阶数字滤波器,限制了电机驱动控制系统中原有控制器的带宽,影响了电机控制的动态性能。
3、通过对现有研究成果的分析可见:基于电磁参数在线辨识与基于梯度寻优的方法由于集成了额外的算法,尚存在控制系统复杂度较高的问题;而信号注入法会导致电机原有电流控制器的带宽受限,且该方法通常选取需要额外安装传感器或进行多次计算的电磁转矩等物理量作为响应提取的来源,这也限制了其在一些低成本、紧凑型电机需求场景中的应用。因此,如何针对不同的电机电磁参数实现电流矢量角的自适应寻优,并具有简洁的控制架构与灵活的带宽,成为了实现内置式永磁同步电机最大转矩电流比控制的关键。
技术实现思路
1、发明目的:本发明的目的是提供一种内置式永磁同步电机自适应最大转矩电流比控制方法,克服现有方法中所存在的电机参数依赖性强、复杂度高、控制带宽受限等不足之处,确保内置式永磁同步电机在电机参数存在摄动条件下实现准确的最大转矩电流比控制。
2、技术方案:本发明公开了一种内置式永磁同步电机自适应最大转矩电流比控制方法,包括以下步骤:
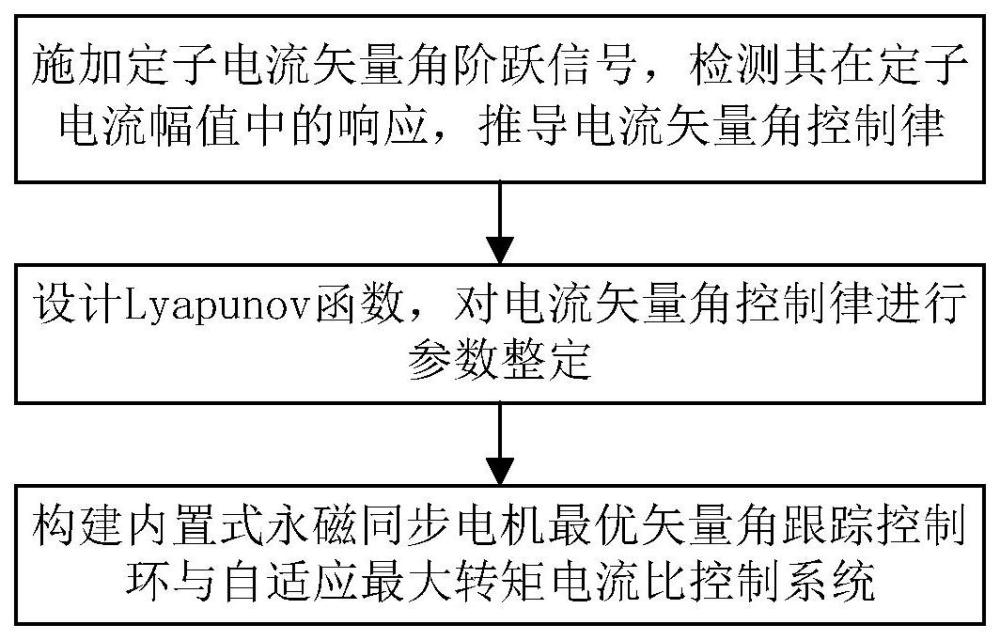
3、s1、施加定子电流矢量角阶跃信号,检测其在定子电流幅值中的响应,推导电流矢量角控制律;
4、s2、设计lyapunov函数,对电流矢量角控制律进行参数整定;具体为:将施加阶跃信号后的定子电流幅值表达式进行泰勒级数展开并忽略高次项,以注入阶跃信号前后相邻两个采样周期的定子电流幅值之差为变量设计lyapunov函数,求导并解出收敛时间,给出控制律参数的取值上限;
5、s3、构建内置式永磁同步电机最优矢量角跟踪控制环与自适应最大转矩电流比控制系统;具体为:将相邻两个采样周期的定子电流幅值之差给入电流矢量角控制律中的积分器,并叠加阶跃信号,得到定子电流矢量角实际给定值与定子电流控制环中的dq轴电流给定值,由此构建出最优矢量角跟踪控制环,并将其嵌入电机的转速-电流双闭环控制系统,得到电机自适应最大转矩电流比控制系统。
6、进一步的,步骤s1具体为:
7、采集当前时刻电流矢量角γk所对应的内置式永磁同步电机三相电流值,提取当前时刻电流幅值is(γk);在电机控制系统中电流矢量角给定值处施加阶跃信号γh=a;采集施加阶跃信号γh后下一个采样周期的电机三相电流值,提取施加阶跃信号γh后的电流幅值is(γk+γh);
8、通过分析阶跃信号γh的施加对施加阶跃信号γh后电流幅值is(γk+γh)的影响可知,定子电流幅值相对于电流矢量角的函数is(γ)为凸函数,当函数的自变量电流矢量角γ在90-180°范围内变化时,函数is(γ)存在唯一一个最小值;
9、设计一个比例系数k,当定子电流幅值is(γ)相对于电流矢量角γ的导数大于0时,使电流矢量角γ减小,反之则使电流矢量角γ增大,即为:
10、
11、定义一个积分系数ki=k,对上式进行积分得到电流矢量角的控制律:
12、
13、采用一个基于积分器的控制律对定子电流幅值的变化率进行调节,则能够对电流矢量角实现控制,以令其跟踪最优矢量角,即电机处于最大转矩电流比控制模态所对应的最优矢量角。
14、进一步的,步骤s2具体为:
15、在任意时刻向电流矢量角γ中施加阶跃信号γh,对任意时刻施加阶跃信号γh后的电机定子电流幅值is(γ+γh)采用泰勒级数展开,并忽略高次项可得:
16、
17、采用基于lyapunov函数的方法进行电流矢量角控制律参数整定,lyapunov函数为:
18、
19、其中,δi为注入阶跃信号前后相邻两个采样周期的定子电流幅值之差;
20、根据泰勒级数展开式,由于is(γ)是一个凸函数,因此其二阶导数满足:
21、
22、lyapunov函数的导数满足:
23、
24、在控制收敛后,δi的值会进入一个微小误差带±|ε|内,当满足δi=δm>0(δm<|ε|)时,由lyapunov函数的导数公式解出收敛时间为:
25、
26、其中,系数δ0为δi在t0时刻的初始值,积分系数ki决定了最优矢量角控制的收敛时间,增大ki取值有利于提高收敛速度;
27、为保证电机稳定运行,设定积分系数ki在选取时需满足:
28、
29、其中,ts为矢量角控制的采样周期,δγmax为相邻采样周期矢量角最大允许变化范围,δismin为识别出项符号最小允许电流幅值变化差值;
30、当内置式永磁同步电机的电磁参数发生摄动时,根据lyapunov函数的导数公式,最优矢量角控制算法的收敛性并不会受到影响;电流矢量角控制律所涉及参数根据电机控制系统实际运行情况进行整定,均无需电机各电磁参数的先验知识。
31、进一步的,选取阶跃信号γh的幅值时,应在易于识别电机中定子电流幅值中响应的同时,确保电机转速波动值小于给定值的2%。
32、进一步的,矢量角控制的采样周期ts应大于定子dq轴电流原有比例-积分控制器响应周期,以留出足够的时间裕度用于识别项的符号。
33、进一步的,步骤s3具体为:
34、将相邻两个采样周期的定子电流幅值作差得到的差值δi给入电流矢量角控制律中的积分器,并叠加阶跃信号γh=a,得到定子电流矢量角实际给定值γ*,并进一步得到定子电流控制环中的dq轴电流给定值,由此构建出最优矢量角跟踪控制环;其中,若电机最优矢量角大于所述控制方法未执行时的电流矢量角,则注入信号幅值应满足a>0;反之,则有a<0;
35、当电机发生负载突变时,电机的最大转矩电流比轨迹将随恒转矩曲线移动,由于电机转速环比例-积分控制器的作用,电机的定子电流幅值亦会发生突变,此时在新的电流给定值基础之上执行所述控制方法,更新最优矢量角;
36、当电机发生直流母线电压突变或转速给定值突变时,依托于电机双闭环控制自身的鲁棒性,电机的转速/电流控制会经历暂态调节过程后稳定下来,无需执行所述控制方法改变电流矢量角;
37、将最优矢量角跟踪控制环嵌入内置式永磁同步电机的转速-电流双闭环控制系统,得到电机自适应最大转矩电流比控制系统架构;外环电机转速环比例-积分控制器的输出值经过最优矢量角自适应跟踪控制环的调节,给出电机dq轴电流的给定值,用于后级定子电流的闭环控制。
38、进一步的,定子电流控制环中的dq轴电流给定值求解公式为:
39、
40、其中,分别为定子电流控制环中的d、q轴电流给定值,is(γ*)为定子电流矢量角实际给定值对应的定子电流幅值。
41、本发明的一种内置式永磁同步电机自适应最大转矩电流比控制系统,包括:
42、电流矢量角控制律计算单元,用于施加定子电流矢量角阶跃信号,检测其在定子电流幅值中的响应,推导电流矢量角控制律;
43、参数整定单元,用于设计lyapunov函数,对电流矢量角控制律进行参数整定;具体为:将施加阶跃信号后的定子电流幅值表达式进行泰勒级数展开并忽略高次项,以注入阶跃信号前后相邻两个采样周期的定子电流幅值之差为变量设计lyapunov函数,求导并解出收敛时间,给出控制律参数的取值上限;
44、自适应控制单元,用于构建内置式永磁同步电机最优矢量角跟踪控制环与自适应最大转矩电流比控制系统;具体为:将相邻两个采样周期的定子电流幅值之差给入电流矢量角控制律中的积分器,并叠加阶跃信号,得到定子电流矢量角实际给定值与定子电流控制环中的dq轴电流给定值,由此构建出最优矢量角跟踪控制环,并将其嵌入电机的转速-电流双闭环控制系统,得到电机自适应最大转矩电流比控制系统。
45、本发明的一种电子设备,所述设备包括:
46、存储有可执行程序代码的存储器;
47、与所述存储器耦合的处理器;
48、所述处理器调用所述存储器中存储的所述可执行程序代码,执行如上述的内置式永磁同步电机自适应最大转矩电流比控制方法的步骤。
49、本发明的一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令被调用时,用于执行如上述的内置式永磁同步电机自适应最大转矩电流比控制的步骤。
50、有益效果:与现有技术相比,本发明的技术方案所带来的有益效果为:
51、(1)本发明所设计的最优矢量角的求取过程独立于电机电磁参数,无需任何电机电磁参数的先验知识,实现电机参数摄动条件下的自适应最大转矩电流比控制。
52、(2)本发明所设计的控制方案具有简洁的控制架构,无需复杂的计算过程,不存在矩阵运算、迭代运算,通过形式简单的阶跃信号施加与一个基于积分器的控制律即可实现最优矢量角的在线跟踪控制,更便于在工业界内置式永磁同步电机驱动系统常用的数字微处理器中执行。
53、(3)本发明所设计的控制方案不采用数字滤波器,因此不会影响内置式永磁同步电机控制系统中原有转速、电流控制器的带宽。
54、(4)本发明所设计的控制方案无需配备电磁转矩传感器,仅需采用内置式永磁同步电机驱动系统中均会安装的电流传感器提取电机定子电流中的响应,即在实现电机最大转矩电流比控制的同时无需增加系统软硬件成本。
- 还没有人留言评论。精彩留言会获得点赞!