一种基于鱼眼轴承的球形电机支撑结构及球形电机
本发明涉及球形电机的,特别涉及一种基于鱼眼轴承的球形电机支撑结构及球形电机。
背景技术:
1、目前,随着现代科技的发展,对生产工具的性能和结构的要求越来越高,多自由度运动结构在工业生产和航空航天等领域具有重要的战略意义。机器人关节等多自由度结构使用传统单轴电机时,需要多台电机搭配机械连接结构,如使用球形电机,可减少所需电机数量,大大简化机械系统结构。球形电机可以通过简单的结构和较小的体积实现三自由度运动,具备体积小,响应速度快,定位精确的优点,在人形机器人、工业机器人、汽车航天等领域具备广泛应用前景,得到了国内外学者的广泛关注。
2、球形电机通常由球形带轴转子和球壳形定子组成。理想状态下,球形电机的气隙为规则的球壳结构,这对球形的结构设计尤其是转子支撑结构设计提出了要求,即要稳定保证定转子同心,又要保证转子能够实现多自由度运动,即完成自转、俯仰与偏航运动。目前常见的支撑结构有两种,一种是在气隙处放置一定数量的万向轮,通过调整万向轮的放置位置满足球形电机转子的支撑要求,主要问题有:1.采用万向轮点接触来支撑转子表面,需要将万向轮安装在定转子之间,存在定子铁心与万向轮空间争夺问题;2.采用万向轮点接触来支撑转子表面,其所受的摩擦力随负载的变化而变化,摩擦力的不确定增大了电机转矩控制的难度;3.采用少量万向轮支撑,则会导致转子稳定性差,运行过程中可能出现转子偏心问题;然而增加万向轮数量,则会增加定转子之间的摩擦力,影响球机输出性能。另一种是将球形关节放置在转子内部,对转子进行支撑,但存在的主要问题有:1.球形关节的安装条件要求其不能倾斜或倒置,限制了支撑结构的灵活性;2.球形关节采用单轴支撑,随转子运动过程中,容易导致轴承受力不均匀,出现变形问题;3.球形关节目前生产方仅有日本,且价格昂贵,性能存在不确定性。
技术实现思路
1、本发明为解决公知技术中存在的技术问题而提供一种基于鱼眼轴承的球形电机支撑结构及球形电机。
2、本发明为解决公知技术中存在的技术问题所采取的技术方案是:
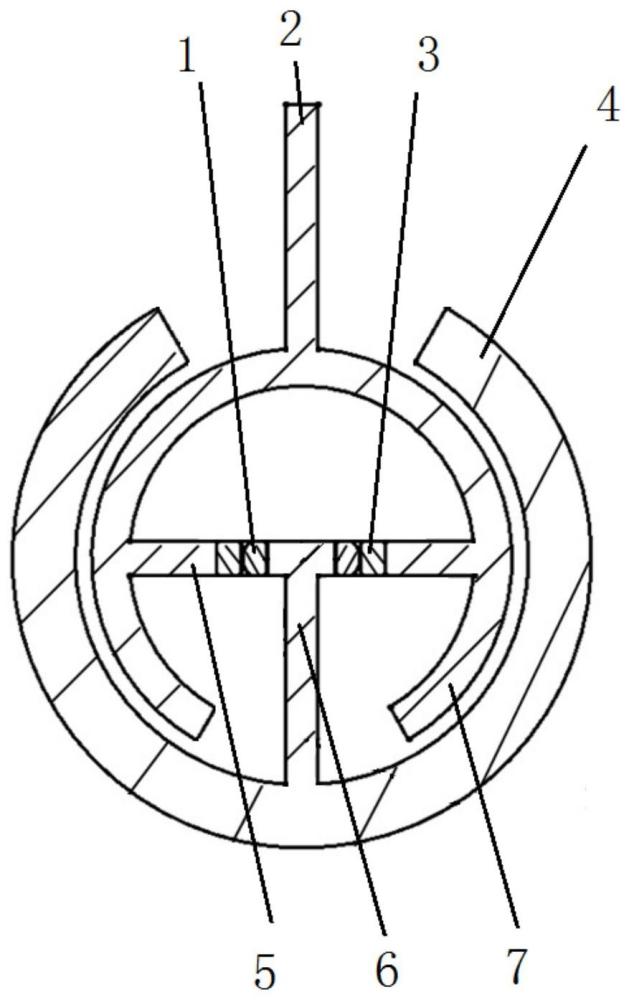
3、一种基于鱼眼轴承的球形电机支撑结构,包括球壳形定子、球壳形转子及鱼眼轴承;球壳形转子位于球壳形定子内且两者球心重合;球壳形定子设有一个与其固接且径向向内的定子支撑轴;球壳形转子设有均与其固接的转子支撑装置及径向向外的转子输出轴;转子支撑装置的支撑力方向为径向;球壳形定子设有通过转子输出轴的圆形缺口e;球壳形转子设有通过定子支撑轴的圆形缺口f;定子支撑轴与转子支撑装置通过鱼眼轴承连接,其中定子支撑轴与鱼眼轴承的内圈固接,转子支撑装置与鱼眼轴承的外圈固接。
4、进一步地,转子支撑装置为中心位于球心的环形板;环形板内侧与鱼眼轴承的外圈固接。
5、进一步地,转子支撑装置包括两个以上绕球心周向均布的径向向内的转子支撑轴;所有转子支撑轴的内侧端均与鱼眼轴承的外圈固接。
6、进一步地,还包括对应与定子支撑轴固接的定子支撑轴套及与转子支撑轴固接的转子支撑轴套;定子支撑轴套套接在鱼眼轴承内圈内并与其过盈配合;转子支撑轴套套接在鱼眼轴承外圈外并与其过盈配合。
7、进一步地,定子支撑轴套的横截面为圆环形或外圆内方形;定子支撑轴与定子支撑轴套过盈配合。
8、进一步地,转子支撑轴套的横截面外轮廓为正多边形,正多边形的边数与转子支撑轴数量相同;转子支撑轴垂直于正多边形的边。
9、进一步地,转子支撑轴套的各侧面开有插入转子支撑轴的孔a;转子支撑轴与孔a过盈配合。
10、进一步地,圆形缺口e等同于球壳形定子被锥角为2βs且顶点为球心的圆锥体截切后形成的缺口;圆形缺口f等同于球壳形定子被锥角为2βr且顶点为球心的圆锥体截切后形成的缺口。
11、进一步地,以球壳形转子的球心为原点o,转子输出轴的中心线为y轴,建立xoy平面直角坐标系,在此坐标系内,将球壳形转子内球面在xoy平面投影的圆与定子支撑轴在xoy平面投影的矩形的长边的交点记为a点,并将a点与o点的连线与y轴负半轴形成的夹角记为角a;将定子壳内球面在xoy平面投影的圆与转子输出轴在xoy平面投影的矩形的长边的交点记为b点,并将b点与o点的连线与y轴正半轴形成的夹角记为角b;
12、设:转子输出轴俯仰运动时绕球心转动角度范围为[-α,α],转子输出轴的直径为d,定子支撑轴的直径为d,定子球壳的内半径为r,转子球壳的内半径为r;
13、则角a,角b的计算公式如下:
14、
15、
16、βs及βr的计算公式如下:
17、βr=α+a;
18、βs=α+b。
19、本发明还提供了一种球形电机,该球形电机包括上述的基于鱼眼轴承的球形电机支撑结构。
20、本发明具有的优点和积极效果是:
21、1、本发明采用鱼眼轴承与机械支撑相配合,可以实现成本低、偏转角度更大、稳定性更高、定转子无偏心的支撑效果。
22、2、本发明将球形电机运行过程中定转子间的滑动摩擦变为轴承内带润滑的滚动摩擦,大大降低了运行阻力。减小支撑摩擦力,避免支撑点与转子表面发生接触摩擦;保证球机在运动过程中所受摩擦力的一致性。
23、3、本发明转子支撑装置采用多轴支撑或环形板支撑的方式,采用多轴支撑时,平衡了各支撑轴的受力情况,降低了支撑轴的承受压力。提高支撑结构的稳定性,降低转子运动时出现偏心的概率。
24、4、本发明支撑结构位于转子内部,提高了球形电机气隙空间的利用率,进而提高了球形电机的转矩密度或功率密度。避免支撑结构与定子铁心争夺空间。
25、5、本发明对于各类尺寸的球形电机均适用,且对球形电机的放置方式不予限制,转子输出轴可处于倾斜状态。
技术特征:
1.一种基于鱼眼轴承的球形电机支撑结构,其特征在于,包括球壳形定子、球壳形转子及鱼眼轴承;球壳形转子位于球壳形定子内且两者球心重合;球壳形定子设有一个与其固接且径向向内的定子支撑轴;球壳形转子设有均与其固接的转子支撑装置及径向向外的转子输出轴;转子支撑装置的支撑力方向为径向;球壳形定子设有通过转子输出轴的圆形缺口e;球壳形转子设有通过定子支撑轴的圆形缺口f;定子支撑轴与转子支撑装置通过鱼眼轴承连接,其中定子支撑轴与鱼眼轴承的内圈固接,转子支撑装置与鱼眼轴承的外圈固接。
2.根据权利要求1所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,转子支撑装置为中心位于球心的环形板;环形板内侧与鱼眼轴承的外圈固接。
3.根据权利要求1所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,转子支撑装置包括两个以上绕球心周向均布的径向向内的转子支撑轴;所有转子支撑轴的内侧端均与鱼眼轴承的外圈固接。
4.根据权利要求3所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,还包括对应与定子支撑轴固接的定子支撑轴套及与转子支撑轴固接的转子支撑轴套;定子支撑轴套套接在鱼眼轴承内圈内并与其过盈配合;转子支撑轴套套接在鱼眼轴承外圈外并与其过盈配合。
5.根据权利要求4所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,定子支撑轴套的横截面为圆环形或外圆内方形;定子支撑轴与定子支撑轴套过盈配合。
6.根据权利要求4所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,转子支撑轴套的横截面外轮廓为正多边形,正多边形的边数与转子支撑轴数量相同;转子支撑轴垂直于正多边形的边。
7.根据权利要求6所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,转子支撑轴套的各侧面开有插入转子支撑轴的孔a;转子支撑轴与孔a过盈配合。
8.根据权利要求1所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,圆形缺口e等同于球壳形定子被锥角为2βs且顶点为球心的圆锥体截切后形成的缺口;圆形缺口f等同于球壳形定子被锥角为2βr且顶点为球心的圆锥体截切后形成的缺口。
9.根据权利要求8所述的基于鱼眼轴承的球形电机支撑结构,其特征在于,以球壳形转子的球心为原点o,转子输出轴的中心线为y轴,建立xoy平面直角坐标系,在此坐标系内,将球壳形转子内球面在xoy平面投影的圆与定子支撑轴在xoy平面投影的矩形的长边的交点记为a点,并将a点与o点的连线与y轴负半轴形成的夹角记为角a;将定子壳内球面在xoy平面投影的圆与转子输出轴在xoy平面投影的矩形的长边的交点记为b点,并将b点与o点的连线与y轴正半轴形成的夹角记为角b;
10.一种球形电机,其特征在于,该球形电机包括权利要求1至9任一所述的基于鱼眼轴承的球形电机支撑结构。
技术总结
本发明公开了一种基于鱼眼轴承的球形电机支撑结构及球形电机,包括球壳形定子、球壳形转子及鱼眼轴承;球壳形转子位于球壳形定子内且两者球心重合;球壳形定子设有一个与其固接且径向向内的定子支撑轴;球壳形转子设有均与其固接的转子支撑装置及径向向外的转子输出轴;转子支撑装置的支撑力方向为径向;球壳形定子设有通过转子输出轴的圆形缺口E;球壳形转子设有通过定子支撑轴的圆形缺口F;定子支撑轴与转子支撑装置通过鱼眼轴承连接,其中定子支撑轴与鱼眼轴承的内圈固接,转子支撑装置与鱼眼轴承的外圈固接。本发明偏转角度更大、稳定性更高、定转子无偏心、提高了球形电机的转矩密度或功率密度。
技术研发人员:李洪凤,赵楚乔,米梦来
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!