一种工程机械回转电机控制方法、装置及系统与流程
本发明属于工程机械控制,具体涉及一种工程机械回转电机控制方法、装置及系统。
背景技术:
1、随着新能源汽车行业的迅猛发展,低碳绿色发展成为了工程机械行业的首要目标。工程机械电动化进程正在加速推进,电动回转替换液压回转成为了新的行业趋势。电动回转具有能量效率利用率高以及能量可回收的优点,对续航的提升起到至关重要的作用。因此对回转电机控制也提出了新的要求。
2、现有技术一般直接采用输入信号与输出信号作对应关系获取目标转速,在回转线性操作时,由于输入信号波动,会出现电机突然减速的情况,导致操控舒适性降低,影响驾驶员的驾驶体验。采用滤波的方式对输入信号进行平滑处理后与输出信号作对应关系获取目标转速,能够消除输入信号波动的影响,但是会导致输出滞后比较严重;多采用在目标转速的控制上增加斜坡控制使得输出较为稳定,斜坡速度为恒定值,当目标转速与实际转速相差过大时,反向回转容易导致输出滞后。对电机扭矩的控制多采用恒定扭矩控制,各种工况下扭矩的限制不变,会导致续航降低。
技术实现思路
1、针对上述问题,本发明提出一种工程机械回转电机控制方法、装置及系统,旨在解决输出滞后、操控舒适性差的问题,提高回转系统的适应性,安全性和经济性。
2、为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
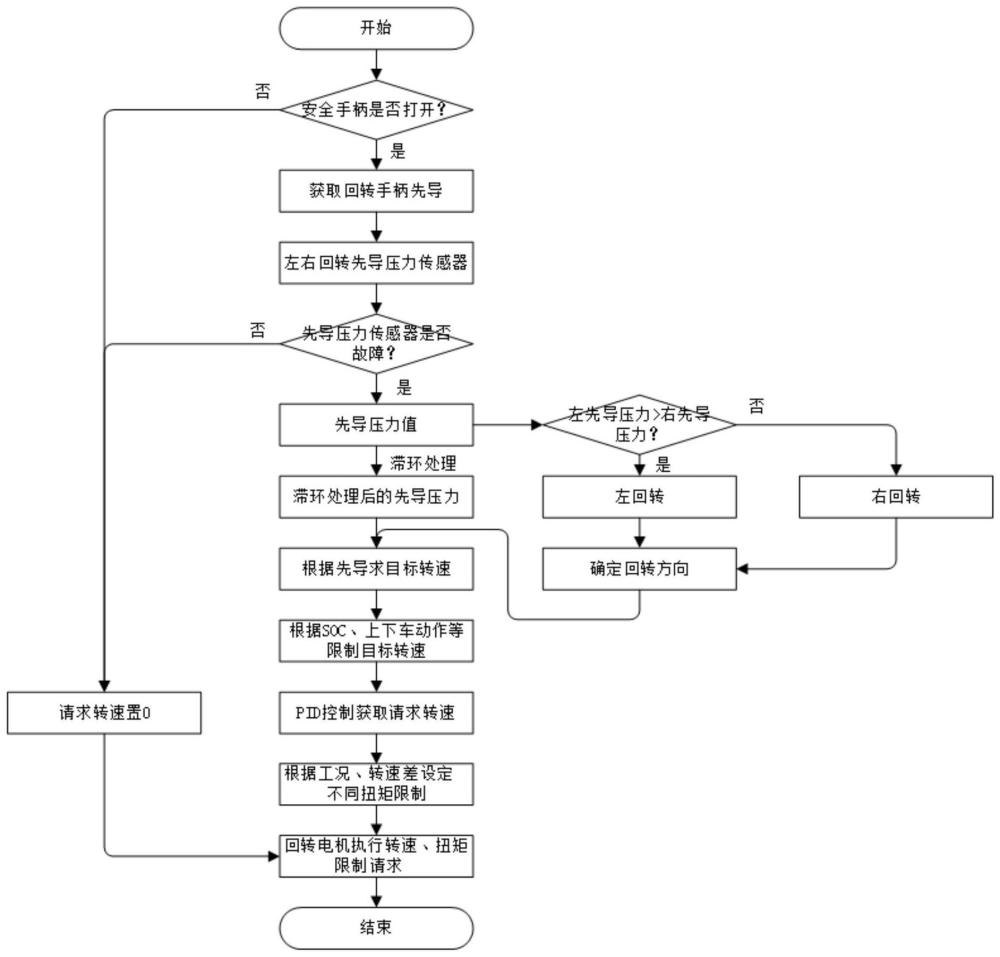
3、第一方面,本发明提供了一种工程机械回转电机控制方法,包括:
4、对获取到的回转先导压力进行滞环处理;
5、基于滞环处理后的回转先导压力,以及最大转速约束,计算出回转电机目标转速;
6、基于回转电机目标转速和回转电机实际转速,确定出回转电机的工况,并计算出对应工况下回转电机的请求转速;
7、基于回转电机的请求转速和实际转速的转速误差,以及回转电机的工况,确定出回转电机的请求扭矩上限值;
8、基于回转电机的请求转速和请求扭矩上限值,控制回转电机运行。
9、可选地,定义上一周期输出的回转先导压力为out,定义获取到的回转先导压力为p,所述对获取到的回转先导压力进行滞环处理,包括:
10、当p≤out+s1,且out-p≤s2时,则将上一周期输出的回转先导压力out作为滞环处理后的回转先导压力;
11、当p>out+s1,或out-p>s2时,则将获取到的回转先导压力p作为滞环处理后的回转先导压力;
12、其中,s1、s2为阈值,值为正数。
13、可选地,所述回转电机目标转速的计算方法包括:
14、将电池的充电状态soc、泵电机转速以及上下车动作的情况作为最大转速约束,基于滞环处理后的回转先导压力,结合回转先导压力与回转电机转速之间的映射关系,得到回转电机目标转速。
15、可选地,当电池的充电状态soc小于设定阈值时,所述回转先导压力与回转电机转速之间的映射关系为:
16、v=(α*vmax-0)/(pmax-pmin)*(p-pmin)
17、其中,v为回转电机目标转速,vmax为预设的最大回转电机目标转速,pmax为最大先导压力,pmin为最小先导压力,p为回转先导压力,α取值为30%-40%。
18、可选地,当电池的充电状态soc大于或等于设定阈值时,根据泵电机转速以及上下车动作,生成限制系数,所述回转先导压力与回转电机转速之间的映射关系为:
19、v=β*(vmax-0)/(pmax-pmin)*(p-pmin)
20、其中,v为回转电机目标转速,vmax为预设的最大回转电机目标转速,pmax为最大先导压力,pmin为最小先导压力,p为回转先导压力,β为限制系数,通过查表获得,所述表中包括泵电机转速、上下车动作与限制系数之间的对应关系。
21、可选地,定义回转电机实际转速为va,回转电机目标转速为v,所述回转电机的工况的确定方法包括:
22、当v*va≥0时:
23、若v-va≥s3,则回转电机处于急加速工况;
24、若s4≤v-va<s3,则回转电机处于正常加速工况;
25、若0≤v-va<s4,则回转电机处于缓加速工况;
26、若v-va≤-s3,则回转电机处于急减速工况;
27、若-s3≤v-va<-s4,则回转电机处于正常减速工况;
28、若-s4≤v-va<0,则回转电机处于缓减速工况;
29、当v*va<0时:
30、若v-va|≥s3,则回转电机处于急减速工况;
31、若s4≤|v-va|<s3,则回转电机处于正常减速工况;
32、若0≤|v-va|<s4,则回转电机处于缓减速工况;
33、其中,s3、s4为阈值,值为正数。
34、可选地,当回转电机处于急加速、正常加速、急减速、正常减速工况下,采用pid控制策略控制回转电机,基于回转电机目标转速和回转电机实际转速,计算出回转电机的请求转速,所述回转电机的请求转速的计算公式为:
35、δq(k)=kp*(e(k)-e(k-1))+ki*e(k)+kd(e(k)-2e(k-1)+e(k-2))
36、q(k)=δq(k)+q(k-1)
37、其中,q(k)为第k个周期的请求转速,δq(k)为第k个周期的请求转速增量,kp为比例系数,ki为积分系数,kd为微分系数,e(k)为第k个周期请求转速与实际转速的转速误差。
38、可选地,所述回转电机的请求扭矩上限值的计算方法包括:
39、当回转电机处于急加速或急减速工况下,扭矩系数ε为ε1,当回转电机处于正常加速、正常减速、缓加速或缓减速工况下,扭矩系数ε为ε2;
40、基于请求转速与实际转速的转速误差e(k),按照t=tmin+ε*e(k),计算出请求扭矩上限值t;
41、若t≤tmin,则令t=tmin;
42、若t≥tmax,则令t=tmax;
43、其中,tmin表示最小请求扭矩值,tmax表示最大请求扭矩值,tmin<tmax。
44、第二方面,本发明提供了一种工程机械回转电机控制装置,包括相连的回转先导压力传感器和控制器;
45、所述回转先导压力传感器采集回转先导压力,并发送至控制器;
46、所述控制器被配置为执行以下步骤:
47、对获取到的回转先导压力进行滞环处理;
48、基于滞环处理后的回转先导压力,以及最大转速约束,计算出回转电机目标转速;
49、基于回转电机目标转速和回转电机实际转速,确定出回转电机的工况,并计算出对应工况下回转电机的请求转速;
50、基于回转电机的请求转速和实际转速的转速误差,以及回转电机的工况,确定出回转电机的请求扭矩上限值;
51、基于回转电机的请求转速和请求扭矩上限值,控制回转电机运行。
52、第三方面,本发明提供了一种工程机械回转电机系统,包括存储介质和处理器;
53、所述存储介质用于存储指令;
54、所述处理器用于根据所述指令进行操作以执行根据第一方面中任一项所述的方法。
55、与现有技术相比,本发明的有益效果:
56、本发明提出对获取到的回转先导压力进行滞环处理,能够在不影响操控滞后性的前提下优化输入信号,改善操控的舒适性和稳定性。
57、本发明能够根据基于目标转速和回转电机实际转速确定多种回转工况,进行精细化控制,并使用预设的控制策略,增加操控的稳定性和舒适性,解决输出滞后的问题;
58、本发明能够基于回转电机的转速误差,以及回转电机的工况,进而计算出请求扭矩上限值,提高回转系统的适应性,安全性和经济性。
- 还没有人留言评论。精彩留言会获得点赞!