一种永磁同步电机考虑系统约束的直接预测位置控制方法
本发明属于永磁同步电机控制,尤其涉及一种永磁同步电机考虑系统约束的直接预测位置控制方法。
背景技术:
1、永磁同步电机具有高转矩惯量比、高效率等优势,在新能源汽车、高端数控机床、航天航空、极大规模集成电路制造等领域得到广泛应用。那么如何改善永磁同步电机系统的位置跟踪精度和动态响应速度具有重要意义。
2、传统控制策略中位置矢量控制包含多个级联pi控制器结构,需要整定多个参数,且系统动态性能优化有限。模型预测控制(model predictive control,mpc)具有建模直观、结构简单、动态响应快以及易于包含多种约束等优点,在永磁同步电机的控制中得到越来越多的应用。模型预测控制主要分为有限控制集模型预测控制(finite control set-model predictive control,fcs-mpc)和连续控制集模型预测控制(continuous controlset-model predictive control,ccs-mpc)。其中,fcs-mpc是直接发送对应于最优电压矢量的开关状态信号以触发逆变器的开关管,最大的特点是无需pwm。
3、而ccs-mpc更容易实现较长范围的预测控制,能够根据pwm原理和逆变器拓扑生成开关状态,具有更好的稳态性能。但是对于系统约束,需要将其作为连续控制集模型预测控制方法的边界条件。通常采用迭代计算方法求解优化问题,但计算需求较高,不利于与控制信号相结合的实时计算。二次规划(qp)算法是求解凸问题的一种方法,该方法的系统约束的边界需要是线性的,而且实际求解二次规划问题会增加很大的计算压力,收敛速度慢,较难满足实时优化的需求。
4、为解决实际中控制量受约束的预测控制问题,且避免非线性优化的数值解法计算量大、收敛速度慢等缺点,通过求解最优性能指标在优化空间中的等值曲面,从几何角度分析控制量受到的幅值约束和变化速率约束,并进行优化控制,因此研究适用于永磁同步电机的考虑系统约束的直接预测位置控制方法有着重要的意义。
技术实现思路
1、本发明的目的是提供一种适用于永磁同步电机系统的考虑系统约束的直接预测位置控制方法,解决实际中控制量受约束的预测控制问题,且避免非线性优化的数值解法计算量大、收敛速度慢等缺点。
2、本发明采取的技术方案是:一种永磁同步电机考虑系统约束的直接预测位置控制方法包括以下步骤,
3、步骤s1,根据永磁同步电机的数学建模,推导系统预测输出的表达式,通过连续控制集模型预测控制计算无约束情况下的最优解;
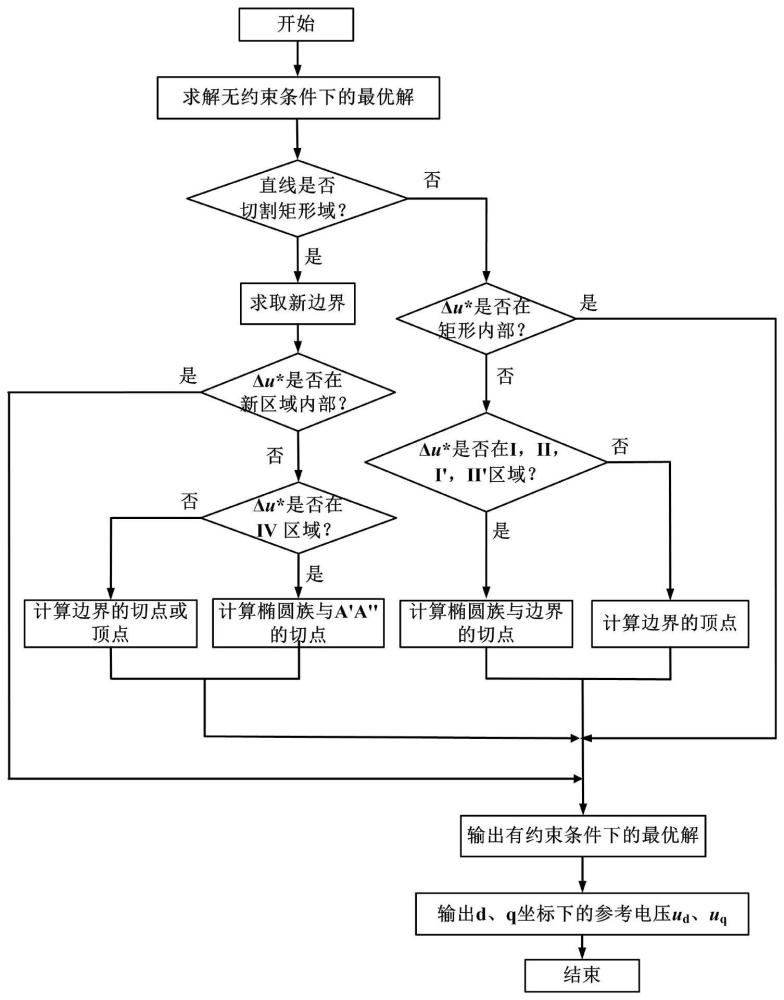
4、步骤s2,受实际永磁同步电机系统额定输出电流和电机本身电压电流最大值的限制,得到永磁同步电机应该满足的三个约束条件:电流约束、转速约束和电压约束,考虑控制域nc=2时的情况,分别将电流约束、转速约束和电压约束下的δud和δuq表示为以δud(k+1)为纵坐标、以δud(k)为横坐标和以δuq(k+1)为纵坐标、以δuq(k)为横坐标平面下的矩形区域,根据约束描述的直线是否切割矩形区域,分为以下两种情况:
5、当直线不切割矩形区域时,判断无约束情况下最优解表示的同心椭圆的圆心o是否在约束可行域内,是则直接输出,否则根据圆心o落入约束可行域的位置不同,计算椭圆与约束可行域的相切点或边界的顶点;
6、当直线切割矩形区域时,先求取新的边界组成新的约束可行域,判断无约束情况下最优解表示的同心椭圆的圆心o是否在约束可行域内,是则直接输出,否则根据圆心o落入约束可行域的位置不同,计算椭圆与约束可行域的相切点或边界的顶点;
7、步骤s3,结合求解出的相切点和顶点,输出有约束条件下的最优解δudo和δuqo,将其分别与d轴和q轴电压相加,得到d轴和q轴坐标下的参考电压ud和uq。
8、优选地,所述步骤s1中,预测输出的表达式为,
9、y=hy(k)+f′δx(k)+g′δu
10、式中,
11、y=[yt(k+1) yt(k+2) … yt(k+n)]t;h=[i2×2 i2×2 … i2×2]t;x=[id iq ωe θ]t;y=[id θ]t;δu=[δu(k)t δu(k+1)t … δu(k+nc-1)t]t;
12、
13、
14、nc为控制域,np为预测域,且nc≤np,rs、ls分别为定子电阻、电感,ψf为永磁体磁链,p为极对数,j为转动惯量,b为粘性摩擦系数,ts为采样周期,id、iq为定子电流的d轴、q轴分量,ωe为电角速度且ωe=pω,ω为机械角速度,θ为转子机械角度。
15、优选地,所述步骤s1中,无约束情况下的最优解为,
16、δu=[g′tqag′+qu]-1g′tqa[r-hy(k)-f′δx(k)]
17、式中,r=[rr(k+1)t rr(k+2)t … rr(k+np)t]t;rr=[id* θ*]t,
18、kid,kθ,ku为d轴电流、位置、控制量的权重系数id*、θ*分别为d轴电流和转子位置的给定值。
19、优选地,所述步骤s2中,电流约束、转速约束和电压约束为:
20、
21、
22、
23、
24、式中,
25、
26、
27、
28、idmax为d轴电流最大值,iqmax为q轴电流最大值,udc为直流侧电压。
29、优选地,所述步骤s2中,带有约束条件的预测控制实时优化问题写为如下形式,
30、
31、式中,a1、a2、a3、a4为三种约束的与集合的结果;
32、考虑nc=2时的情况,对于幅度和变化率的约束可化简为,
33、
34、式中,
35、前两个约束为以δudm(k+1)为纵坐标、以δudm(k)为横坐标的平面上所构成的矩阵区域,第三个约束为处于两条斜率为-1的直线之间的带状区域,它们共同的交集即为整个优化问题的可行域,根据约束描述的直线是否切割矩形区域,分为以下两种情况:
36、(1)在直线不切割矩形区域时,当无约束情况下最优解表示的同心椭圆的圆心o不在约束可行域内,根据圆心o落入约束可行域的位置不同,计算椭圆与约束可行域的相切点或边界的顶点,确定方法如下:
37、1)相切于ab时切点为,
38、
39、2)相切于ad时切点为,
40、
41、3)相切于cd、bc时,
42、当求cd切点时,即将ab情况下的结果中δudm(k+1)=δumin,当求bc切点时,即将ad情况下的结果中δudm(k)=δu′min;
43、4)四个角状区域时,
44、当位于该区域时矩形顶点a、b、c、d即为最优解;
45、(2)当直线切割矩形区域时,需求取新的边界组成新的约束可行域,并计算椭圆与约束可行域的相切点或边界的顶点,确定方法如下:
46、1)切点:
47、
48、式中,
49、2)顶点:
50、当最优解的椭圆族与切线的切点在角状区域时,角状区域的最优解即为顶点a′或a″。
51、优选地,所述步骤s3中,d轴和q轴坐标下的参考电压ud和uq为,
52、ud(k)=δudm(k)-d0+ud(k-1)
53、uq(k)=δuqm(k)-q0+uq(k-1)
54、式中,ud(k-1)、uq(k-1)分别为k-1时刻的d轴和q轴电压。
55、本发明的优点和积极效果是:
56、本发明提出了一种适用于永磁同步电机的考虑系统约束的直接预测位置控制方法,解决实际中控制量受约束的预测控制问题:
57、1、本发明将价值函数表示为优化空间中一等值曲面族,考虑控制域nc=2时的情况,可行域为两个多边形及其内部,那么优化问题的实质即为求椭圆曲线族何时与可行域相切的问题。分别将电流约束、转速约束和电压约束下的δud、δuq表示为以δud(k+1)为纵坐标、以δud(k)为横坐标和以δuq(k+1)为纵坐标、以δuq(k)为横坐标平面下的矩形区域,根据约束描述的直线是否切割矩形区域,分别求取相对应的约束可行域,并计算椭圆与约束可行域的相切点,输出有约束条件下最优解,最终得到d轴和q轴坐标下的参考电压,能够将整个优化数值计算简化为逻辑判断与解析计算,加快预测控制的优化速率,提高动态响应性能。
58、2、本发明采用扩展增量型连续控制集模型预测控制对电流、转速和位置进行多步预测,通过对所建立的价值函数求偏导得到无约束下的控制增量,并结合三种约束的几何分析,能够获得更好的稳态性能。
- 还没有人留言评论。精彩留言会获得点赞!