一种输电线路越障机器人的柔性越障轨道的制作方法
本发明涉及越障机器人,尤其涉及一种输电线路越障机器人的柔性越障轨道。
背景技术:
1、现有的输电线路从直线塔的塔头的一侧经过,输电线路的上侧通过绝缘子连接在直线塔的塔头上。越障机器人的越障轨道参考申请号为cn202310998257x的专利,其安装在直线塔的塔头上,两端与输电线路固定连接,越障轨道弯曲并从绝缘子的外侧经过。越障机器人包括机器人本体、竖直固定连接在机器人本体上侧的连接臂,以及转动连接在连接臂上端的一侧的滚轮,滚轮沿输电线路运动并靠近直线塔的塔头后,滚轮运动至越障轨道上侧并通过越障轨道绕过绝缘子和直线塔的塔头。
2、由于环境温度的变化,输电线路会因热胀冷缩而出现张紧或松弛,这容易导致输电线路和越障轨道之间的连接节点的应力过大,严重时,会导致输电线路被拉坏而造成电力事故,或者,输电线路和越障轨道之间的连接断开而导致越障轨道失效。
技术实现思路
1、本发明为了解决现有的越障轨道与输电线路之间的连接节点容易应力过大而导致事故的发生,提出一种输电线路越障机器人的柔性越障轨道,输电线路伸缩时,柔性越障轨道的两端可形变,从而可防止输电线路和柔性越障轨道之间应力过大,进而避免事故的发生。
2、为实现上述目的,本发明采用如下技术方案:
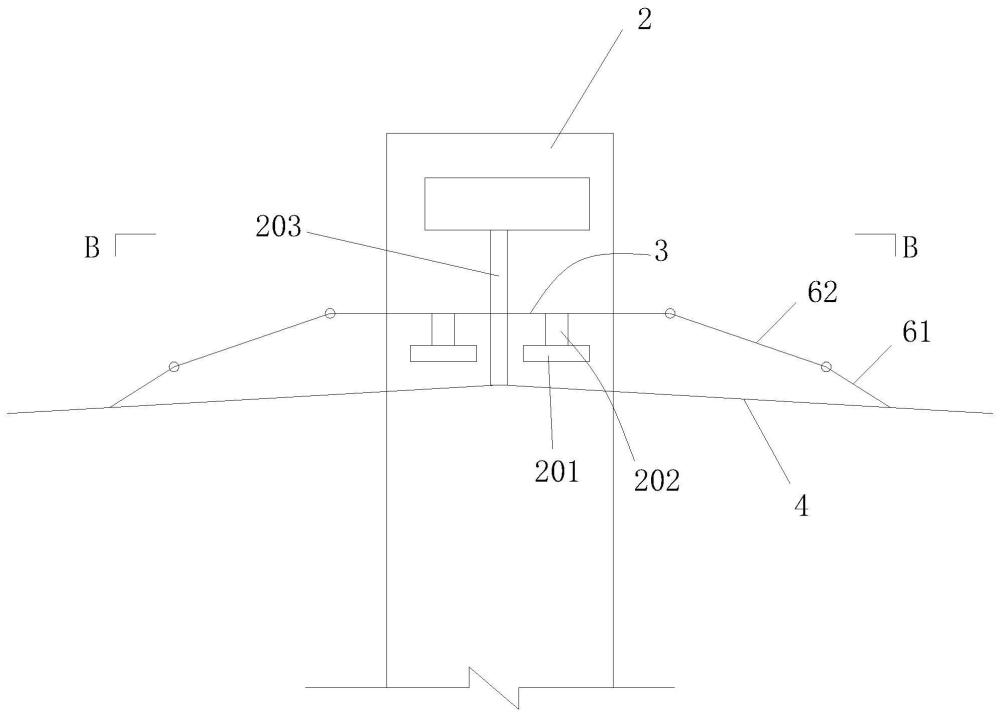
3、一种输电线路越障机器人的柔性越障轨道,包括可安装在直线塔的塔头的一侧的弯曲段,弯曲段的中部背向直线塔弯曲,弯曲段的两端位于输电线路的上方;柔性越障轨道还包括设置在弯曲段的两端且便于越障机器人的滚轮上下弯曲段的导向部;导向部包括连接段和过渡段,连接段的一端连接在输电线路的上侧,连接段的另一端倾斜向上并与过渡段的一端铰接,过渡段的另一端倾斜向上并与弯曲段的端部铰接。
4、通过上述设置,输电线路伸缩时,柔性越障轨道的两端可形变,从而可防止输电线路和柔性越障轨道之间应力过大,进而避免事故的发生。
5、进一步的,连接段远离过渡段的一端锁紧在输电线路上。
6、进一步的,柔性越障轨道还包括弹性件,连接段和过渡段之间设置有弹性件,以使过渡段和连接段同轴设置;连接段远离过渡段的一端搭接在输电线路的上侧。
7、通过上述设置,当输电线路伸缩时,柔性越障轨道的两端均能通过重力搭接在输电线路上;另外,越障机器人运动至连接段上时,导向部可向下形变,从而减少越障机器人的震动,防止越障机器人脱轨。
8、进一步的,连接段包括连接段本体和搭接板,搭接板的一端与输电线路的上侧搭接,搭接板的另一端向上倾斜并与连接段本体固定连接,搭接板的上侧和连接段本体的上侧齐平,连接段本体的下端与输电线路之间存在间隙,连接段本体的上端与过渡段铰接。
9、通过上述设置,越障机器人的滚轮能稳定的沿搭接板和连接段本体运动向过渡段。
10、进一步的,连接段本体的上端设置有开口朝向过渡段的转动槽,导向部还包括与过渡段的下端固定连接的连接板,以及固定连接在转动槽中的转轴,连接板插入转动槽中并和转轴转动连接;连接段本体和过渡段之间形成安装空间,弹性件为环状的橡胶件,弹性件沿着安装空间的边缘设置,过渡段、弹性件和连接段本体之间形成密闭的容纳空间,连接板位于容纳空间内。
11、通过上述设置,连接段通过转轴、连接板与过渡段铰接;弹性件可防止雨水、灰尘等进入容纳空间锈蚀转轴、连接板等部件,保证导向部弯曲的顺畅。
12、进一步的,过渡段的下端沿外周设置有环形槽,以使过渡段的下端形成向连接段本体凸出的凸台,弹性件靠近过渡段的一侧套设置在凸台上,柔性越障轨道还包括可将弹性件箍紧在凸台上的抱箍,抱箍的上侧和过渡段的上侧齐平。
13、通过上述设置,可通过抱箍将橡胶件安装在过渡段和连接段之间。
14、进一步的,导向部和输电线路之间的夹角为10-15°。
技术特征:
1.一种输电线路越障机器人的柔性越障轨道,其特征在于,包括可安装在直线塔的塔头的一侧的弯曲段,所述弯曲段的中部背向所述直线塔弯曲,所述弯曲段的两端位于所述输电线路的上方;
2.根据权利要求1所述的一种输电线路越障机器人的柔性越障轨道,其特征在于,所述连接段远离所述过渡段的一端锁紧在所述输电线路上。
3.根据权利要求1所述的一种输电线路越障机器人的柔性越障轨道,其特征在于,所述柔性越障轨道还包括弹性件,所述连接段和所述过渡段之间设置有所述弹性件,以使所述过渡段和所述连接段同轴设置;所述连接段远离所述过渡段的一端搭接在所述输电线路的上侧。
4.根据权利要求3所述的一种输电线路越障机器人的柔性越障轨道,其特征在于,所述连接段包括连接段本体和搭接板,所述搭接板的一端与所述输电线路的上侧搭接,所述搭接板的另一端向上倾斜并与所述连接段本体固定连接,所述搭接板的上侧和所述连接段本体的上侧齐平,所述连接段本体的下端与所述输电线路之间存在间隙,所述连接段本体的上端与所述过渡段铰接。
5.根据权利要求4所述的一种输电线路越障机器人的柔性越障轨道,其特征在于,所述连接段本体的上端设置有开口朝向所述过渡段的转动槽,所述导向部还包括与所述过渡段的下端固定连接的连接板,以及固定连接在所述转动槽中的转轴,所述连接板插入所述转动槽中并和所述转轴转动连接;所述连接段本体和所述过渡段之间形成安装空间,所述弹性件为环状的橡胶件,所述弹性件沿着所述安装空间的边缘设置,所述过渡段、所述弹性件和所述连接段本体之间形成密闭的容纳空间,所述连接板位于所述容纳空间内。
6.根据权利要求5所述的一种输电线路越障机器人的柔性越障轨道,其特征在于,所述过渡段的下端沿外周设置有环形槽,以使所述过渡段的下端形成向所述连接段本体凸出的凸台,所述弹性件靠近所述过渡段的一侧套设置在所述凸台上,所述柔性越障轨道还包括可将所述弹性件箍紧在所述凸台上的抱箍,所述抱箍的上侧和所述过渡段的上侧齐平。
7.根据权利要求1所述的一种输电线路越障机器人的柔性越障轨道,其特征在于,所述导向部和所述输电线路之间的夹角为10-15°。
技术总结
本发明公开了一种输电线路越障机器人的柔性越障轨道,包括可安装在直线塔的塔头的一侧的弯曲段,弯曲段的中部背向直线塔弯曲,弯曲段的两端位于输电线路的上方;柔性越障轨道还包括设置在弯曲段的两端且便于越障机器人的滚轮上下弯曲段的导向部;导向部包括连接段和过渡段,连接段的一端连接在输电线路的上侧,连接段的另一端倾斜向上并与过渡段的一端铰接,过渡段的另一端倾斜向上并与弯曲段的端部铰接。本发明提出一种输电线路越障机器人的柔性越障轨道,输电线路伸缩时,柔性越障轨道的两端可形变,从而可防止输电线路和柔性越障轨道之间应力过大,进而避免事故的发生。
技术研发人员:倪宏宇,周辉,任明辉,赵峰,颜文旭,徐龙,汪磊,卢强,王立挺,杨宁,倪利,储杰,金立东,施加凯,黄晓光,周亚辉
受保护的技术使用者:国网浙江省电力有限公司绍兴供电公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!