一种工业机器人导轨布置结构的制作方法
本技术涉及一种工业机器人导轨布置结构,属于自动化焊接机器人。
背景技术:
1、工业机器人在智能制造领域发挥着越来越重要的作用,如提高产能、提高产品质量的稳定性、降低工人劳动强度、提高智能化水平等。工业机器人在汽车制造业应用广泛,涉及工序多、零部件种类繁杂、流水线作业等;对自动化、集成化要求更高。
2、非公路矿用自卸车车架架体的焊缝较多,结构形式复杂;同一线体上需使用多台机器人进行加工,常规采用地轨作为第七轴实现机器人直线移动,此布置方式需要的辅助设备多,占地面积大,故障率多,维修困难。
技术实现思路
1、针对上述现有技术存在的问题,本实用新型提供一种工业机器人导轨布置结构,结构简单,能够适配、承载多个机器人,有效节省空间,方便现场维护保养。
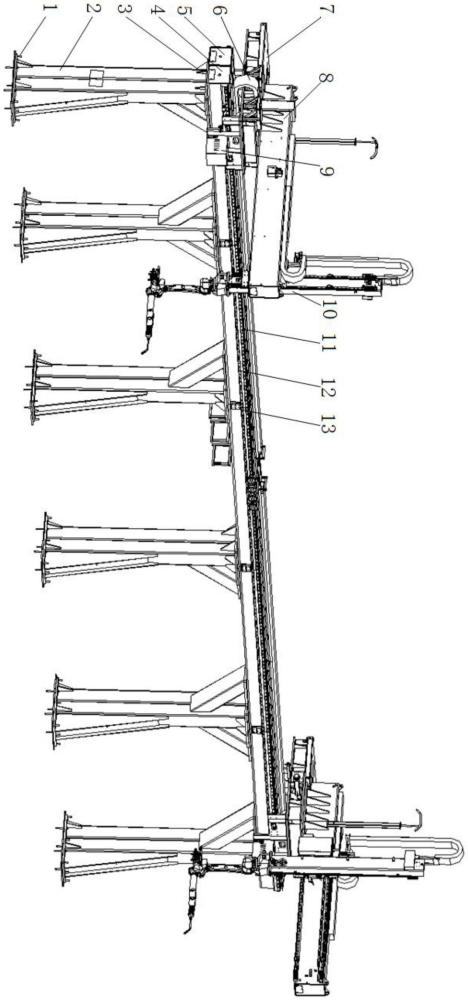
2、为了实现上述目的,本实用新型采用的一种工业机器人导轨布置结构,包括立柱、横梁一、横梁二、支撑平台、前侧导轨和后侧导轨;
3、两个所述立柱垂直地面布置,立柱的顶端通过调节螺栓安装有所述横梁一、横梁二,所述横梁一、横梁二的两侧分别安装有前侧导轨和后侧导轨,横梁上方安装有支撑平台,支撑平台上方安装有前侧滑块、后侧滑块,所述前侧滑块、后侧滑块分别连接在前侧导轨和后侧导轨上;
4、所述支撑平台上连接y轴横梁,z轴横梁连接在y轴横梁上,所述横梁一和横梁二的上方、y轴横梁的上方、z轴横梁的上方均固定设置拖链装置。
5、作为一种改进,所述立柱的上下两端分别设有螺纹孔。
6、作为一种改进,所述横梁一、横梁二固连,横梁间通过连接板刚性连接。
7、作为一种改进,所述前侧导轨通过前侧导轨安装板安装在横梁一上,后侧导轨通过后侧导轨安装板安装在横梁二上。
8、作为一种改进,所述前侧导轨安装板与后侧导轨安装板为非对称结构,前侧导轨安装板为凸型结构,前侧导轨安装在凸型结构上沿,齿条安装在凸型结构下沿,后侧导轨安装板为凹型结构,后侧导轨安装在凹型结构中心。
9、作为一种改进,所述前侧滑块通过前侧t型连接板、后侧滑块通过后侧t型连接板分别与支撑平台相连接,t型连接板和支撑平台均为焊接件。
10、作为一种改进,所述横梁二的一侧、后侧导轨的下方安装除尘管路支架,所述除尘管路支架上布置除尘管,除尘管连接除尘罩体。
11、作为一种改进,还包括安装在横梁上的电机,所述电机驱动一端的主动轮与齿条相啮合,带动机器人在x轴方向进行移动;所述主动轮的前端装有从动轮,电机的一端安装电机护罩。
12、与现有技术相比,本实用新型的工业机器人导轨布置结构,采用倒挂式导轨布置方式,结构简单,运行稳定,刚性强、承载高,防护良好,能适配、承载多个机器人,有效节省空间,方便现场维护保养,具有自动化程度高,占地空间小,维修性便捷的优点。
技术特征:
1.一种工业机器人导轨布置结构,其特征在于,包括立柱(2)、横梁一(4)、横梁二(5)、支撑平台(7)、前侧导轨(11)和后侧导轨(21);
2.根据权利要求1所述的一种工业机器人导轨布置结构,其特征在于,所述立柱(2)的上下两端分别设有螺纹孔。
3.根据权利要求1所述的一种工业机器人导轨布置结构,其特征在于,所述横梁一(4)、横梁二(5)固连,横梁间通过连接板(13)刚性连接。
4.根据权利要求1所述的一种工业机器人导轨布置结构,其特征在于,所述前侧导轨(11)通过前侧导轨安装板(17)安装在横梁一(4)上,后侧导轨(21)通过后侧导轨安装板(20)安装在横梁二(5)上。
5.根据权利要求4所述的一种工业机器人导轨布置结构,其特征在于,所述前侧导轨安装板(17)与后侧导轨安装板(20)为非对称结构,前侧导轨安装板(17)为凸型结构,前侧导轨(11)安装在凸型结构上沿,齿条(12)安装在凸型结构下沿,后侧导轨安装板(20)为凹型结构,后侧导轨(21)安装在凹型结构中心。
6.根据权利要求1所述的一种工业机器人导轨布置结构,其特征在于,所述前侧滑块(15)通过前侧t型连接板(14)、后侧滑块(22)通过后侧t型连接板(23)分别与支撑平台(7)相连接,t型连接板和支撑平台(7)均为焊接件。
7.根据权利要求1所述的一种工业机器人导轨布置结构,其特征在于,所述横梁二(5)的一侧、后侧导轨(21)的下方安装除尘管路支架(24),所述除尘管路支架(24)上布置除尘管,除尘管连接除尘罩体。
8.根据权利要求1所述的一种工业机器人导轨布置结构,其特征在于,还包括安装在横梁上的电机(27),所述电机(27)驱动一端的主动轮(16)与齿条(12)相啮合,带动机器人在x轴方向进行移动;所述主动轮(16)的前端装有从动轮(26),电机(27)的一端安装电机护罩(9)。
技术总结
本技术公开一种工业机器人导轨布置结构,包括立柱、横梁一、横梁二、支撑平台、前侧导轨和后侧导轨;两个立柱垂直地面布置,立柱的顶端通过调节螺栓安装有横梁一、横梁二,横梁一、横梁二的两侧分别安装有前侧导轨和后侧导轨,横梁上方安装有支撑平台,支撑平台上方安装有前侧滑块、后侧滑块,前侧滑块、后侧滑块分别连接在前侧导轨和后侧导轨上;支撑平台上连接Y轴横梁,Z轴横梁连接在Y轴横梁上,横梁一和横梁二的上方、Y轴横梁的上方、Z轴横梁的上方均固定设置拖链装置。本技术结构简单,运行稳定,能适配、承载多个机器人,有效节省空间,方便现场维护保养,具有自动化程度高,占地空间小,维修性便捷的优点。
技术研发人员:周南,朱晨钟,李怀金,赵琦,胡如义,侯光临,杜源,李昊倢,慕海雄
受保护的技术使用者:徐州徐工重型车辆有限公司
技术研发日:20230915
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!