一种辅助投放装置姿态稳定控制方法及系统与流程
本发明属于姿态稳定控制,更具体地,涉及一种辅助投放装置姿态稳定控制方法及系统。
背景技术:
1、辅助投放装置属于发电机膛内检测机器人的重要辅助部分,其功能除了辅助检测机器人投放、回收以外,还能辅助机器人旋转一定角度以检测下一排通风孔。该功能意义在于不仅能免去反复取出放入过程,还能免去繁杂的定位校准过程。投放装置使检测设备显得更加自动化。
2、由于发电机入口间隙较为狭窄,而辅助投放装置需要夹持检测机器人后,安装部署在发电机护环上时,所以希望辅助投放装置小型化,可以顺利部署在狭窄空间中。而为了保证辅助投放装置的小型化,辅助投放装置上的各驱动单元也需小型化,而当驱动单元尺寸较小时,辅助投放装置的输出力矩会较小,造成的后果会是辅助投放装置里面的检测机器人的夹持和投放动作可能不够稳定,容易造成检测机器人从投放装置中跌落或者动作冲击过大损坏发电机定转子部件。考虑过在辅助投放装置中安装用于检测辅助投放装置或者检查测机器人姿态的检测器,但是会造成辅助投放装置或检测机器人体尺寸较大。
技术实现思路
1、为解决以上技术问题,本发明提出一种辅助投放装置姿态稳定控制方法,包括:
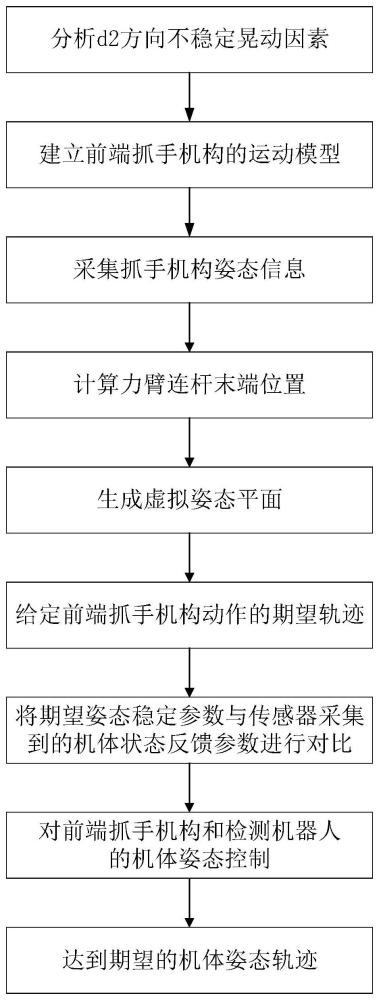
2、步骤一、分析辅助投放装置的不稳定晃动因素;步骤二、建立前端抓手机构的运动学模型;步骤三、采集辅助投放装置的机体姿态参数;步骤四、根据所述机体姿态参数生成表示辅助投放装置姿态的多个虚拟平面;步骤五、给出辅助投放装置动作期望轨迹;步骤六、将期望轨迹与采集的参数进行比较,生成控制目标参数;步骤七、根据所述控制目标参数对辅助投放装置的机体姿态进行控制。
3、进一步的,所述的机体姿态参数包括多个伺服电机的反馈角度和反馈力矩。
4、进一步的,所述的虚拟平面由所述多个伺服电机相连的力臂构成。
5、进一步的,所述控制目标参数包括多个伺服电机相连的力臂末端的目标位置。
6、进一步的,所述机体姿态控制是通过控制所述多个伺服电机的旋转实现的。
7、本发明还提出一种辅助投放装置姿态稳定控制系统,包括:
8、分析模块,用于分析辅助投放装置的不稳定晃动因素;建立运动模型模块,用于建立前端抓手机构的运动学模型;采集机体姿态参数模块,用于采集辅助投放装置的机体姿态参数;生成虚拟平面模块,用于根据所述机体姿态参数生成表示辅助投放装置姿态的多个虚拟平面;给出期望轨迹模块,用于给出辅助投放装置动作期望轨迹;生成控制目标参数,用于将期望轨迹与采集的参数进行比较,生成控制目标参数;姿态控制模块,用于根据所述控制目标参数对辅助投放装置的机体姿态进行控制。
9、进一步的,所述的机体姿态参数包括多个伺服电机的反馈角度和反馈力矩。
10、进一步的,所述的虚拟平面由所述多个伺服电机相连的力臂构成。
11、进一步的,所述控制目标参数包括多个伺服电机相连的力臂末端的目标位置。
12、进一步的,所述机体姿态控制是通过控制所述多个伺服电机的旋转实现的。
13、通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
14、1.本发明的方法,提出了一种基于虚拟姿态平面控制技术,可自主调整辅助投放装置在夹持检测机器人过程中遇到的不稳定晃动,避免了使用尺寸较大的驱动单元或者额外添加检测抓手机构姿态的检测器,实现了辅助投放装置的小型化。
15、2.本发明的方法,实现夹持检测机器人的同时,柔顺的投放检测机器人,降低了抓手机构与发电机定转子表面接触时的冲击力,减小了各驱动单元、抓手机构和检测机器人的受伤程度,提高了产品的可靠性。
技术特征:
1.一种辅助投放装置姿态稳定控制方法,其特征在于,包括:
2.如权利要求1所述的一种辅助投放装置姿态稳定控制方法,其特征在于,所述的机体姿态参数包括多个伺服电机的反馈角度和反馈力矩。
3.如权利要求1所述的一种辅助投放装置姿态稳定控制方法,其特征在于,所述的虚拟平面由所述多个伺服电机相连的力臂构成。
4.如权利要求1所述的一种辅助投放装置姿态稳定控制方法,其特征在于,所述控制目标参数包括多个伺服电机相连的力臂末端的目标位置。
5.如权利要求1所述的一种辅助投放装置姿态稳定控制方法,其特征在于,所述机体姿态控制是通过控制所述多个伺服电机的旋转实现的。
6.一种辅助投放装置姿态稳定控制系统,其特征在于,包括:
7.如权利要求6所述的一种辅助投放装置姿态稳定控制系统,其特征在于,所述的机体姿态参数包括多个伺服电机的反馈角度和反馈力矩。
8.如权利要求6所述的一种辅助投放装置姿态稳定控制系统,其特征在于,所述的虚拟平面由所述多个伺服电机相连的力臂构成。
9.如权利要求6所述的一种辅助投放装置姿态稳定控制系统,其特征在于,所述控制目标参数包括多个伺服电机相连的力臂末端的目标位置。
10.如权利要求6所述的一种辅助投放装置姿态稳定控制系统,其特征在于,所述机体姿态控制是通过控制所述多个伺服电机的旋转实现的。
技术总结
本发明公开一种辅助投放装置姿态稳定控制方法及系统,该方法包括:步骤一、分析辅助投放装置的不稳定晃动因素;步骤二、建立前端抓手机构的运动学模型;步骤三、采集辅助投放装置的机体姿态参数;步骤四、根据所述机体姿态参数生成表示辅助投放装置姿态的多个虚拟平面;步骤五、给出辅助投放装置动作期望轨迹;步骤六、将期望轨迹与采集的参数进行比较,生成控制目标参数;步骤七、根据所述控制目标参数对辅助投放装置的机体姿态进行控制。
技术研发人员:严思杰,赵龙攀,陈晶晶,刘冲,邹翔,陈巍,叶桑,谢勇谋,岳晶,李众,邱太进
受保护的技术使用者:无锡中车时代智能装备研究院有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!