一种智能运输复合机器人的制作方法
本发明涉及机器人,具体涉及一种智能运输复合机器人。
背景技术:
1、随着人类社会的不断发展,各种替代人类劳动力的机器人孕育而生,尤其是随着运输机器人越来越多的出现在人们的生活中,中国专利公开了一种涉及一种智能车间运输机器人.(授权公告号cn216422546u),该专利技术能够通过可伸缩夹持臂来对需要进行运输的物品进行夹持,相比单纯的放置物品在装置上端,利用夹持臂运输,使得运输过程更加的稳定,能够很好的保证运输过程中物品的安全性,但是,该装置夹持臂的夹持范围小,不够灵活,且该装置自动化程度较低,不够实用。因此,本领域技术人员提供了一种智能运输复合机器人,以解决上述背景技术中提出的问题。
技术实现思路
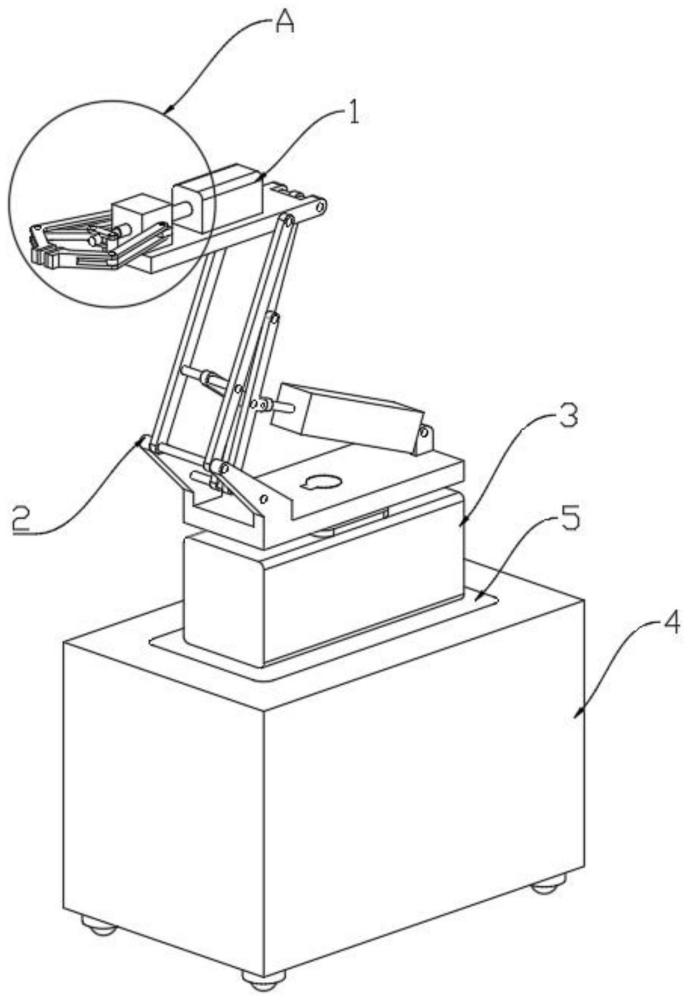
1、为解决上述技术问题,本发明提供一种智能运输复合机器人,包括:
2、夹持组件,用于夹持所需要运输的物品;
3、伸收组件,与所述夹持组件相连且用于带动夹持组件在水平方向进行移动;
4、电机,与所述伸收组件相连且用于带动夹持组件与伸收组件围绕电机输出端进行转动;
5、所述夹持组件包括限位块、电缸一、夹持臂、推块、推杆一,所述电缸一位于所述限位块后侧,且电缸一前侧设有的伸缩杆一贯穿限位块前后两侧,所述夹持臂一端与限位块侧面活动连接,所述推块固定于所述伸缩杆一接近末端的位置,所述推杆一外端与所述夹持臂接近夹持面的拐角处活动连接,且推杆一内端与所述推块活动连接;
6、所述伸收组件包括底板,所述底板底部中间与所述电机的输出端固定连接,底板前端接近底部的位置设有连杆一,且底板前端接顶部设有连杆二;
7、所述连杆一中部对称设有推杆二,所述推杆二底端与连杆一转动连接,且推杆二后侧设有电缸二,所述电缸二后侧与底板顶部后端活动连接,电缸二前侧输出端上固接有的连接套与所述推杆二后侧中部设有的连接块活动连接,所述推杆二中部活动连接有连杆三,且推杆二顶端活动连接有支撑杆;
8、所述连杆二两端对称设有导向杆,所述连杆三前端与导向杆内侧中间设有的杆活动连接,所述导向杆顶端设有支撑板,所述导向杆与所述支撑板两侧接近后端的位置活动连接,所述支撑杆顶端与支撑板后端活动连接;
9、所述限位块与所述电缸一固定于所述支撑板顶部,且限位块位于支撑板顶部接近前端的位置。
10、优选地:所述电机下方设有用于调节夹持高度的升降组件。
11、优选地:所述升降组件包括液压缸、伸缩支撑杆和升降板,所述液压缸顶部设有的液压杆顶端与升降板底部中间固定连接,所述升降板顶部与电机底部固定连接。
12、优选地:所述伸缩支撑杆设有两个,所述两个伸缩支撑杆对称设置于液压杆两侧,且伸缩支撑杆顶端与升降板底部固定连接。
13、优选地:所述升降组件底部设有底箱,所述底箱内设有放置腔。
14、优选地:所述液压缸与所述伸缩支撑杆底部固定于所述放置腔内部底板上,且所述底箱底部四角处均安装有万向轮。
15、优选地:所述夹持臂关于伸缩杆一对称设有两个,所述两个夹持臂后端分别与限位块左右两侧设有的连接耳活动连接。
16、优选地:所述夹持臂前端夹持面处设有防滑垫。
17、优选地:所述推杆一设有两个,所述两个推杆一内端分别与推块左右两端活动连接。
18、本发明的技术效果和优点:
19、本发明,通过夹持组件、伸收组件和电机之间的配合,增大了夹持臂的夹持范围,可适应不同方位及不同高度的物品取拿,装置灵活多变,实用性高。
20、本发明,通过夹持组件、伸收组件和电机之间的配合,可完成物品取拿、运输、摆放的一系列动作,且本装置结构简单、自动化操作,经济适用,可进行大批量生产。
技术特征:
1.一种智能运输复合机器人,其特征在于,包括:
2.根据权利要求1所述的一种智能运输复合机器人,其特征在于,所述电机(3)下方设有用于调节夹持高度的升降组件(5)。
3.根据权利要求2所述的一种智能运输复合机器人,其特征在于,所述升降组件(5)包括液压缸(51)、伸缩支撑杆(52)和升降板(53),所述液压缸(51)顶部设有的液压杆(511)顶端与升降板(53)底部中间固定连接,所述升降板(53)顶部与电机(3)底部固定连接。
4.根据权利要求3所述的一种智能运输复合机器人,其特征在于,所述伸缩支撑杆(52)设有两个,所述两个伸缩支撑杆(52)对称设置于液压杆(511)两侧,且伸缩支撑杆(52)顶端与升降板(53)底部固定连接。
5.根据权利要求3所述的一种智能运输复合机器人,其特征在于,所述升降组件(5)底部设有底箱(4),所述底箱(4)内设有放置腔(41)。
6.根据权利要求5所述的一种智能运输复合机器人,其特征在于,所述液压缸(51)与所述伸缩支撑杆(52)底部固定于所述放置腔(41)内部底板上,且所述底箱(4)底部四角处均安装有万向轮(42)。
7.根据权利要求3所述的一种智能运输复合机器人,其特征在于,所述夹持臂(13)关于伸缩杆一(121)对称设有两个,所述两个夹持臂(13)后端分别与限位块(11)左右两侧设有的连接耳(111)活动连接。
8.根据权利要求7所述的一种智能运输复合机器人,其特征在于,所述夹持臂(13)前端夹持面处设有防滑垫(131)。
9.根据权利要求1所述的一种智能运输复合机器人,其特征在于,所述推杆一(15)设有两个,所述两个推杆一(15)内端分别与推块(14)左右两端活动连接。
技术总结
本发明涉及机器人技术领域,具体涉及一种智能运输复合机器人,包括夹持组件,用于夹持所需要运输的物品;伸收组件,与所述夹持组件相连且用于带动夹持组件在水平方向进行移动;电机,与所述伸收组件相连且用于带动夹持组件与伸收组件围绕电机输出端进行转动;所述伸收组件下方设有用于调节夹持高度的升降组件。本发明,通过夹持组件、伸收组件和电机之间的配合,增大了夹持臂的夹持范围,可适应不同方位及不同高度的物品取拿,装置灵活多变,实用性高;同时,可完成物品取拿、运输、摆放的一系列动作,且本装置结构简单、自动化操作,经济适用,可进行大批量生产。
技术研发人员:牟宏磊,田磊,贾佳,刘晶晶,杨鑫凯
受保护的技术使用者:重庆遨博智能科技研究院有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!