一种低计算量的表贴式永磁同步电机位置和速度直接估计方法及装置
本发明属于电机控制,具体涉及一种低计算量的表贴式永磁同步电机位置和速度直接估计方法及装置。
背景技术:
1、为了使用无位置传感器控制技术使电机处于正常工作状态,需要设计电机位置和速度估计器来实现电机位置和速度的准确估计。
2、传统技术通常基于滑模观测器加锁相环的组合来实现,滑模观测器首先通过电机输入电压和电机输出电流观测到反电动势,锁相环利用观测到的反电动势得到电机的位置和速度。这种传统技术的实现结构复杂,涉及到了较多的加减法运算、乘法运算、积分运算、park变换和符号函数运算,还包含了低通滤波器,其中park变换涉及到正余弦函数计算,其计算量较大。
3、综上所述,现有技术存在的问题是:
4、传统基于滑模观测器加锁相环的电机位置与速度的估计方法由于其实现结构复杂、计算量大,对微控制器计算能力的要求更高。
技术实现思路
1、为了克服上述传统技术存在的不足,本发明的目的在于提供一种低计算量的表贴式永磁同步电机位置和速度直接估计方法及装置,该方法及装置不需要观测电机的反电动势或磁链,相比于传统的滑模观测器加锁相环组合的实现形式,结构更加简单,计算量更小,对微控制器计算能力的要求更低。
2、为了实现上述目的,本发明采用的技术方案是:
3、一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,包括以下步骤:
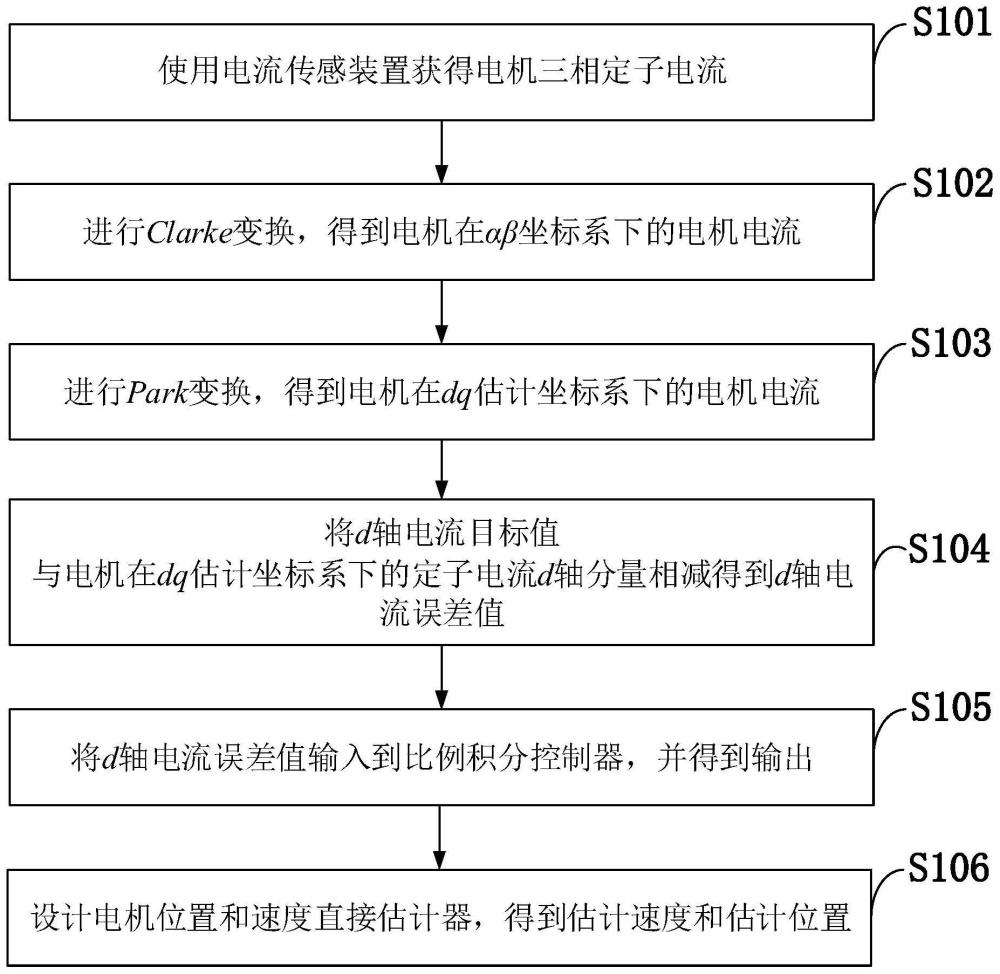
4、步骤一,获取电机三相定子电流;
5、步骤二,对所述电机三相定子电流进行clarke变换,得到电机在两相静止坐标系(αβ坐标系)下的定子电流;
6、步骤三,利用电机位置估计值,对电机在两相静止坐标系(αβ坐标系)下的定子电流进行park变换,得到电机在两相旋转坐标系(dq估计坐标系)下的定子电流d轴分量和q轴分量;
7、步骤四,将d轴电流目标值与电机在dq估计坐标系下的定子电流d轴分量相减得到d轴电流误差值;
8、步骤五,将d轴电流误差值输入到d轴电流环比例积分控制器,得到输出电压量。
9、步骤六,利用电机在dq估计坐标系下定子电流d轴分量和所述比例积分控制器输出电压量,设计电机位置和速度直接估计器,得到电机速度估计值和位置估计值。
10、所述步骤一中通过电流传感装置得到的电机三相定子电流,分别为ia、ib和ic。
11、所述步骤二中对电机三相定子电流进行clarke变换,得到电机在αβ坐标系下的定子电流iα和iβ,其计算公式为:
12、
13、所述步骤三中利用电机位置估计值,对电机在αβ坐标系下的定子电流进行park变换,得到电机在dq估计坐标系下的定子电流d轴分量id和q轴分量iq,其计算公式为:
14、
15、其中:为电机位置估计值,即步骤六中得到的电机位置估计值。
16、所述步骤四中d轴电流目标值为与电机在dq估计坐标系下的定子电流d轴分量id相减,得到d轴电流误差值ed,其计算公式为:
17、
18、所述步骤五中将d轴电流误差值输入到d轴电流环比例积分控制器,得到输出电压量vd,其计算公式为:
19、vd=kped+ki∫edds
20、其中:kp和ki为比例积分控制器设计参数。
21、所述步骤六中利用电机在dq估计坐标系下的定子电流d轴分量和d轴电流环比例积分控制器输出电压量,设计电机位置和速度直接估计器,得到电机速度估计值和位置估计值其计算公式为:
22、
23、
24、其中:r为表贴式永磁同步电机定子电阻,l为表贴式永磁同步电机定子电感,k1和k2为设计参数。
25、一种低计算量的表贴式永磁同步电机位置和速度直接估计装置,包括三相电流传感器,所述三相电流传感器用于采集电机定子三相电流,采集到的信号经滤波器、信号放大器和模数转换器的处理,输入到电机参数估计器进行计算,最终得到电机位置和速度;
26、所述电机参数估计器为微控制器单元(mcu或dsp);
27、所述电流传感器基于霍尔效应,安装于电机的a、b、c三根相线上;
28、微控制器单元(mcu或dsp)按照步骤运行上述低计算量的表贴式永磁同步电机位置和速度直接估计方法,计算得到电机位置和速度。
29、本发明的有益效果:
30、本发明提出了一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,并设计了相应的装置;装置主要由电流传感器、滤波器、信号放大器、模数转换器和电机参数估计器构成,其中电机参数估计器由微控制器单元(dsp或mcu)运行本发明的直接估计方法,得到电机位置和速度等电机参数。
31、该方法结构简单并且计算简便,其利用电机在dq估计坐标系下的定子电流d轴分量和比例积分控制器输出电压量设计的电机位置和速度直接估计器,总共只包含了3次加减法运算、3次乘法运算、2次积分运算,不包含低通滤波器,不涉及正余弦计算和符号函数运算,相比于传统的基于滑模观测器加锁相环的电机位置与速度的估计方法,计算量大大减少。
技术特征:
1.一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,所述步骤一中通过电流传感装置得到的电机三相定子电流,分别为ia,ib和ic;
3.根据权利要求1所述的一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,所述步骤三中利用电机位置估计值对步骤二得到的电机在αβ坐标系下的定子电流iα和iβ进行park变换,得到电机在dq估计坐标系下的定子电流和d轴分量id和和q轴分量iq,其计算公式为:
4.根据权利要求1所述的一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,所述步骤四中将d轴电流目标值与步骤三得到的电机在dq估计坐标系下的定子电流d轴分量id相减,得到d轴电流误差值ed,其计算公式为:
5.根据权利要求1所述的一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,所述步骤五中将步骤四得到的d轴电流误差值ed输入到d轴电流环比例积分控制器,得到输出电压量vd,其计算公式为:
6.根据权利要求1所述的一种低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,所述步骤六中利用步骤三得到的电机在dq估计坐标系下的定子电流d轴分量id和步骤五得到的d轴电流环比例积分控制器输出电压量vd,设计电机位置和速度直接估计器,得到电机速度估计值和电机位置估计值其计算公式为:
7.一种低计算量的表贴式永磁同步电机位置和速度直接估计装置,用于实现权利要求1-6任一项所述的低计算量的表贴式永磁同步电机位置和速度直接估计方法,其特征在于,包括三相电流传感器,所述三相电流传感器用于采集电机定子三相电流,采集到的信号经滤波器、信号放大器和模数转换器的处理,输入到电机参数估计器进行计算,最终得到电机位置和速度。
8.根据权利要求7所述的一种低计算量的表贴式永磁同步电机位置和速度直接估计装置,其特征在于,所述电流传感器基于霍尔效应,安装于电机的a、b、c的三根相线上;所述电机参数估计器为微控制器单元;微控制器单元按照步骤运行上述低计算量的表贴式永磁同步电机位置和速度直接估计方法,计算得到电机位置和速度。
技术总结
本发明公开了一种低计算量的表贴式永磁同步电机位置和速度直接估计方法及装置,包括以下步骤:步骤一,通过电流传感装置得到电机三相定子电流;步骤二,对三相定子电流进行Clarke变换,得到电机在αβ坐标系下的定子电流;步骤三,利用电机位置估计值,对电机在αβ坐标系下的定子电流进行Park变换,得到电机在dq估计坐标系下的定子电流;步骤四,将d轴电流目标值与电机在dq估计坐标系下的定子电流d轴分量相减得到d轴电流误差值;步骤五,将d轴电流误差值输入到d轴电流环比例积分控制器,并得到输出电压量;步骤六,利用电机在dq估计坐标系下的定子电流d轴分量和d轴电流环比例积分控制器输出电压量,设计电机位置和速度直接估计器,得到电机的速度估计值和位置估计值。本发明使电机参数估计方法的结构更加简单、计算量更小,使其对微控制器计算能力的要求降低。
技术研发人员:李光奇,戴志勇,陈子浩,王国庆,刘笑菲,李建文
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!