一种双转子永磁电机动力联耦结构及控制方法
本发明涉及电机设备,具体涉及一种双转子永磁电机动力联耦结构及控制方法。
背景技术:
1、随着新能源汽车的快速发展,电动汽车受到越来越多的关注,当前大多数电动汽车的动力驱动形式为集中电机驱动。集中电机驱动的整体构造为在传动燃油汽车的布置上进行优化改进,具有结构紧凑、布置简便,车载空间利用率高等优点,但由于离合器、减速器、传动轴等构件的存在,动力传递会发生不可避免的损失,使得能量利用率降低。而轮毂电机采用电机直接驱动车轮转动的形式在很大程度上避免了上述能量损失的产生,且省去了离合器等结构降低了车辆底盘的复杂度,目前大多数的轮毂电机还停留在单定子转子结构上。
2、cn113765319a公开了一种双转子盘式轮毂电机及其控制方法,采用的双转子结构包括由外转子与外绕组线圈构成的外电机、内转子与内绕组线圈构成的内电机,两电机采用同圆心的行星轮排布结构安装太阳轮与齿圈分别为内电机与外电机,行星轮为动力输出结构,其内外电机之间的动力切换由电子元件控制的滑槽结构进行控制,其滑动功能的实现依赖于外置滚筒电机的通电情况进行控制,可以实现双电机驱动、任意单电机驱动以及空挡四种动力传递方式。该发明改善了传统轮毂电机结构,实现了双电机结构的两档轮毂电机驱动、制动功能,且两档平滑切换即提高了驾驶员驾驶控制准确度,也有利于进一步提高能量利用率。但该发明采用的换挡结构为内外转子电磁力自锁,以及外电机驱动脱离的形式,外电机与内电机之间通过多个定滑轮结构进行动力传输,使得轮毂电机的机构更为复杂,且定滑轮加带传动的布置方式会降低控制精度,影响驾驶员体验;在永磁体的布置问题上,该发明采用同圆心的布置结构,没有考虑永磁体以及绕组磁场之间的相互影响,电机的能源利用率以及动力系统的稳定性还存在较大的提升空间。
3、cn107093971a公开了一种永磁同步电机的转矩控制系统及控制方法,综合采用模糊算法与神经网络算法对永磁同步电机进行转矩控制,将输入定子磁链和电磁转矩进行模糊处理,再把神经网络运用到表格查询上,保持快速的动态响应同时降低了定子电流的谐波分量、转矩脉动与定子磁链脉动量,改善了电机的转矩与定子磁链的幅值存在较大的脉动的问题,但该发明采用控制方法的稳定性依赖于初始参数的设计,无法根据车辆的运行状况进行调整,存在一定的改进空间。
技术实现思路
1、为解决现有技术中存在的不足,本发明提出了一种双转子永磁电机动力联耦结构及控制方法,将两套动力系统之间添加挡磁结构进行分隔,实现两套动力系统的独立,解决了磁场之间相互影响的问题,并采用螺纹连接结构作为换挡结构,通过简单的机械结构连接降低了换挡结构的复杂度,且能够根据电机的运行状况对控制参数进行调整,达到提高换挡稳定性的效果。设计合理,解决了现有技术的不足,具有良好的效果。
2、为了实现上述目的,本发明采取如下技术方案:
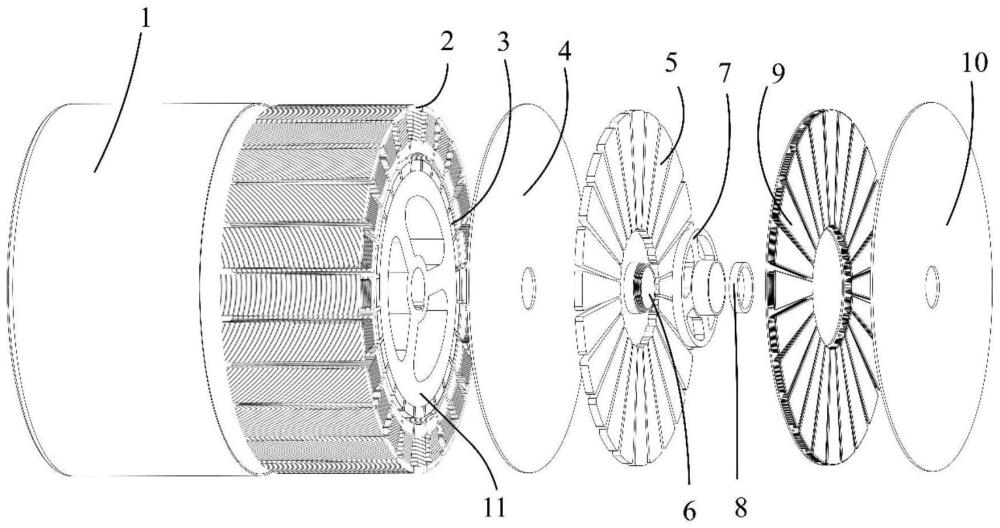
3、一种双转子永磁电机动力联耦结构,包括电机外壳、主电机、挡磁板和盘式电机,所述电机外壳内穿设有主轴;
4、所述主电机包括主电机接合套筒,所述主电机接合套筒固定套设在主轴上,主电机接合套筒外表面依次设有第一永磁体和第一绕组线圈;
5、所述盘式电机包括螺纹锁止结构、第二绕组线圈和第二永磁体,所述螺纹锁止结构包括螺纹咬合套筒、滑动接合套筒和轴承,第二永磁体固定连接在滑动接合套筒上,所述螺纹咬合套筒、轴承和第二绕组线圈固定套设在主轴上,所述滑动接合套筒能够在螺纹咬合套筒和轴承之间轴向移动。
6、进一步地,所述滑动接合套筒内壁设有与螺纹咬合套筒相适配的螺纹部和与轴承相适配的光滑部;
7、所述光滑部的直径大于螺纹部的直径,且光滑部和螺纹部之间设有挡瓦结构。
8、进一步地,所述挡磁板固定套设在主电机和盘式电机之间的主轴上;
9、所述螺纹咬合套筒设置在靠近挡磁板的一侧,所述第二绕组线圈设置在远离挡磁板的一侧,所述轴承设置在螺纹咬合套筒和第二绕组线圈之间;
10、所述滑动接合套筒的螺纹部靠近挡磁板,光滑部靠近第二绕组线圈。
11、进一步地,所述第一永磁体垂直于第二永磁体。
12、进一步地,第二绕组线圈通电后产生远离第二永磁体的力,使第二永磁体带动滑动接合套筒轴向移动,与螺纹咬合套筒咬合。
13、一种双转子永磁电机动力联耦结构的控制方法,采用上述的一种双转子永磁电机动力联耦结构,包括以下步骤:
14、s1、采集主电机的转速、主电机和盘式电机的定子磁链、目标转矩;
15、s2、设计模糊控制器,定义输入变量为主电机转速和目标转矩,输出变量为cmt,其中cmt=1、2;当cmt=2时,主电机和盘式电机同时工作,当cmt=1时,主电机单独工作;定义隶属度函数和模糊规则;
16、将s1中的主电机转速和目标转矩输入到模糊控制器中,输出cmt;
17、s3、将输入变量的隶属度信息、cmt、主电机和盘式电机的定子磁链输入到神经网络中,神经网络读取模糊控制器中的隶属度分类信息以及输出变量进行标签处理,在考虑电机稳定性的情况下对输出变量进行解算得到主电机与盘式辅助电机的电机功率目标值n1和n2;
18、s4、利用n1和n2计算得到主电机和盘式电机的目标电流信号将分别与主电机和盘式电机当前状态的电流信号i1、i2进行作差,得到差值电流信号;
19、s5、将差值电流信号输入到电流控制器中,电流控制器根据差值信号对电流脉宽调制器进行调整,输出对应的电流信号控制逆变器进而控制主电机和盘式电机输出;
20、s6、神经网络分析相对时间内的磁链信号,得到电机运行状态,若电机运行状态不稳定,则对n1和n2进行优化。
21、进一步地,s3中,将主电机转速根据大小划分为m个模糊集合,将目标转矩根据大小划分为n个模糊集合,则共有m×n个标签,当主电机转速和目标转矩的隶属度信息对应第个r标签时,n1和n2的计算公式为:
22、n1=f1r(cmt);
23、n2=f2r(cmt);
24、其中,
25、
26、上式中,a1r,b1r,c1r,a2r,b2r,c2r为设定的比例系数,r∈[1,m×n]。
27、进一步地,s6中包括以下子步骤:
28、s6.1、神经网络分别收集主电机和盘式电机[t,t+1,…,t+n]时刻的定子磁链信息ψ1和ψ2,n为正整数,并分别进行傅里叶变换,得到频谱图像,将频谱图像中峰值的频率和振幅相乘得到电机稳定因子e1和e2,将e1和e2相加得到e,与设置的阈值a进行对比;
29、若e<a,则判断联耦结构运行状态稳定;
30、若e>a,则判断联耦结构运行状态不稳定,调整f1r和f2r中的参数为a′1r,b′1r,c′1r,a′2r,b′2r,c′2r,得到:
31、
32、s6.2、将f′1r和f′2r进行储存,当主电机转速和目标转矩的隶属度信息再次对应第r个标签时,采用f′1r和f′2r计算n′1和n′2;
33、若采用f′1r和f′2r的电极稳定因子e′<e,则保留f′1r和f′2r,当k次采用f′1r和f′2r,电机稳定因子均小于e,则将f′1r和f′2r赋值给f′1r和f′2r;
34、若采用f′1r和f′2r的电机稳定因子e′>e,则再次调整f1r和f2r中的参数。
35、本发明所带来的有益技术效果:
36、(1)本发明通过双电机复合结构的螺纹接合套筒能够实现两档动力输出,使得电机在工作过程中能够更充分的利用两电机的动力输出特性进行动力输出,提高了能量利用率;且两档切换结构采用简单机械结构,更为安全稳定。
37、(2)本发明通过轴承结构,使盘式电机绕组线圈部分在单电机驱动模式中能够在轴承上自由转动,相较于传统的双电机复合结构而言,该结构减小了绕组线圈切割磁感线所造成的能量浪费。
38、(3)本发明通过电机磁链信号监测电机波动信号,采用模糊-神经网络模块调整电机电流,在保证电机动力输出的同时对电机稳定性进行了优化。
39、(4)本发明采用的主电机与盘式电机辅助动力输出的形式,相较于单电机主动输出,盘式电机具有更大的功率密度和更高的效率的优势。
40、(5)在车辆起步时双电机共同输出动力提供转矩,在保证车辆动力需求的前提下,使得车辆加速时间更短。
- 还没有人留言评论。精彩留言会获得点赞!