一种机器人无线充电方法、无线充电机器人及介质与流程
本技术涉及无线充电领域,具体而言,涉及一种机器人无线充电方法、无线充电机器人及介质。
背景技术:
1、通过导向装置,强行校正机器人相对充电桩的位置及方向,通过激光雷达、深度相机、超声波雷达、压触感应器等多个探测器配合实现相对充电桩定位。通过将无线充发射端布置在地面内部,正面朝上,将无线充接收端布置在机器人底部,正面朝下,使得机器人无线充电时只需要保证水平方向位置精度即可,规避了接收端与发射端距离、角度的定位要求。现有的缺陷如下:导向装置占地面积大,成本高,且强行导向对机器人结构有一定损伤,需要加强机器人结构和接触部位的抗磨损能力;需要大量的传感器及定位算法辅助,成本较高,技术难度较大,且故障率较高,抗干扰能力较弱;需要平整地面并挖坑,或专门的平台并搭配斜坡,施工量较大,部署成本较高,另外无线充发射端埋入地面,容易泡水,需要较高防水等级;无线充接收端布置在机器人底部,容易泡水磕碰,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本技术实施例的目的在于提供一种机器人无线充电方法、无线充电机器人及介质,可以通过激光雷达对机器人进行移动导航,使机器人可以移动到设定的定位点,从而提高发射端与接收端的配对成功率,实现机器人无线充电效率。
2、本技术实施例还提供了一种机器人无线充电方法,包括以下步骤:
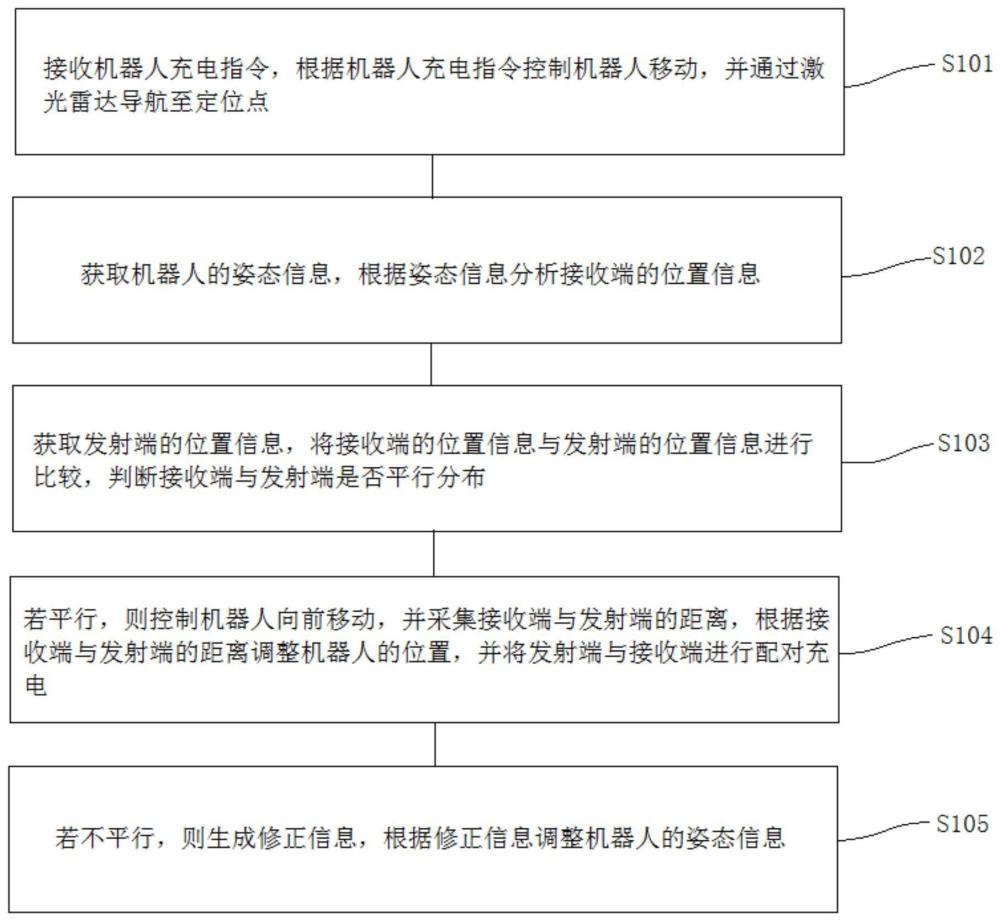
3、接收机器人充电指令,根据机器人充电指令控制机器人移动,并通过激光雷达导航至定位点;
4、获取机器人的姿态信息,根据姿态信息分析接收端的位置信息;
5、获取发射端的位置信息,将接收端的位置信息与发射端的位置信息进行比较,判断接收端与发射端是否平行分布;
6、若平行,则控制机器人向前移动,并采集接收端与发射端的距离,根据接收端与发射端的距离调整机器人的位置,并将发射端与接收端进行配对充电;
7、若不平行,则生成修正信息,根据修正信息调整机器人的姿态信息。
8、可选地,在本技术实施例所述的机器人无线充电方法中,接收机器人充电指令,根据机器人充电指令控制机器人移动,并通过激光雷达导航至定位点;具体包括:
9、获取机器人充电指令,根据机器人充电指令对机器人进行分配发射端,并获取发射端编号;
10、根据发射端编号进行远程获取发射端的位置,并根据反射端的位置进行设定定位点,得到定位点的位置;所述定位点设定为发射端正前方20-50cm处;
11、获取机器人当前位置,根据机器人当前位置与定位点的位置生成导航信息;
12、机器人按照导航信息控制机器人移动至定位点。
13、可选地,在本技术实施例所述的机器人无线充电方法中,机器人按照导航信息控制机器人移动至定位点,具体包括:
14、获取导航信息,生成机器人标准移动轨迹;
15、通过激光雷达获取机器人的当前移动轨迹,将当前移动轨迹与机器人标准移动轨迹进行相似度计算,得到轨迹相似度;
16、判断所述轨迹相似度是否大于或等于设定的相似度阈值;
17、若大于或等于,则控制机器人按照标准移动轨迹继续行驶,直至到达定位点;
18、若小于,则生成反馈信息,根据反馈信息动态调整机器人的移动方向或移动速度。
19、可选地,在本技术实施例所述的机器人无线充电方法中,控制机器人按照标准移动轨迹继续行驶,直至到达定位点,具体包括:
20、控制机器人按照标准移动轨迹行驶,计算机器人前轮位置;
21、将机器人前轮位置与轮挡架的位置进行比较,得到距离差;
22、若距离差为零,则计算机器人前轮与轮挡架之间的力矩;
23、判断力矩是否大于或等于设定的阈值;
24、若大于或等于,则控制机器人前进指令维持时间至5s,使机器人两个前轮均抵持至轮挡架,并取消机器人前进指令;
25、若小于,则按照机器人当前前轮位置维持30s,并将发射端与接收端进行配对。
26、可选地,在本技术实施例所述的机器人无线充电方法中,控制机器人前进指令维持时间至5s,使机器人两个前轮均抵持至轮挡架,并取消机器人前进指令,具体包括:
27、获取机器人前进指令维持时间,若维持时间大于或等于5s,则获取发射端的两侧边缘与接收端两侧边缘之间的距离是否相同;
28、若相同,则取消机器人前进指令,获取接收端与发射端之间的间距,根据间距与设定的间距阈值调整轮挡架的伸出发射端的长度;
29、若不相同,则发射端的两侧边缘与接收端两侧边缘之间的距离差控制机器人后退预定的距离之后调整机器人移动角度,角度调整完成后再次控制机器人前进抵持至轮挡架。
30、可选地,在本技术实施例所述的机器人无线充电方法中,若小于,则按照机器人当前前轮位置维持30s,并将发射端与接收端进行配对之后,还包括:
31、获取发射端与接收端的配对状态,根据配对状态计算配对时间;
32、配对时间到达设定的配对时间时,将当前配对状态与设定的配对状态进行比较,判断配对是否成功;
33、若成功,则获取机器人剩余电量,根据机器人剩余电量计算充电时间;
34、若不成功,则生成机器人控制指令,根据机器人控制指令调整机器人位置。
35、第二方面,本技术实施例提供了一种无线充电机器人,包括:发射端、机器人本体以及设置在机器人本体一端的接收端;
36、所述机器人本体顶部设置有激光雷达,所述激光雷达用于机器人本体导航定位,并实时调整无线充电机器人的姿态;
37、所述机器人本体顶部设置有立柱,所述立柱顶部设置有视觉采集组件,所述视觉采集组件用于采集机器人本体周边图像;
38、所述视觉采集组件包括第一相机与第二相机,所述第一相机与所述第二相机对称设置在立柱顶部的两侧。
39、所述发射端与接收端相配合,所述发射端与所述接收端配对成功后对机器人进行充电;
40、所述机器人本体内置有处理器、存储器以及至少一个程序,所述程序被存储在所述存储器中,并被配置为由所述处理器执行,所述程序包括用于执行机器人无线充电方法的指令。
41、可选地,在本技术实施例所述的无线充电机器人中,所述发射端底部一侧设置有轮挡架,所述轮挡架的侧面与所述发射端一侧的侧面平行,所述发射端通过膨胀螺丝固定在地面上;所述轮挡架通过螺钉固定在发射端上,所述轮挡架上设置有长孔,通过螺钉插入长孔内将轮挡架固定在发射端上,所述长孔用于调整轮挡架的前伸距离。
42、可选地,在本技术实施例所述的无线充电机器人中,所述机器人本体底部四角均设置有车轮,靠近接收端的两个车轮记为前轮,远离接收端的另外两个车轮记为后轮;所述前轮抵住轮挡架时,所述发射端与所述接收端进行配对,所述前轮与所述后轮均为万向轮。
43、第三方面,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括机器人无线充电方法程序,所述机器人无线充电方法程序被处理器执行时,实现如上述所示的机器人无线充电方法的步骤。
44、由上可知,本技术实施例提供的一种机器人无线充电方法、无线充电机器人及介质,通过接收机器人充电指令,根据机器人充电指令控制机器人移动,并通过激光雷达导航至定位点;获取机器人的姿态信息,根据姿态信息分析接收端的位置信息;获取发射端的位置信息,将接收端的位置信息与发射端的位置信息进行比较,判断接收端与发射端是否平行分布;若平行,则控制机器人向前移动,并采集接收端与发射端的距离,根据接收端与发射端的距离调整机器人的位置,并将发射端与接收端进行配对充电;若不平行,则生成修正信息,根据修正信息调整机器人的姿态信息;通过激光雷达对机器人进行移动导航,使机器人可以移动到设定的定位点,从而提高发射端与接收端的配对成功率,实现机器人无线充电效率。
45、本技术的其他特征和优点将在随后的说明书阐述。
- 还没有人留言评论。精彩留言会获得点赞!