一种用于开绕组电机的混合逆变器及其调制方法
本发明涉及电机控制,特别是涉及一种用于开绕组电机的混合逆变器及其调制方法。
背景技术:
1、永磁同步电机凭借其高效率和高功率密度等优点,已被广泛应用于各行各业。但是随着科学技术的飞速发展,越来越多的工作场景对永磁同步电机驱动器的精度和电能质量提出更高要求。
2、提高驱动器的控制频率可直接提高系统控制精度,降低电流谐波获得更好的电能质量。然而,在大部分场景,多使用igbt(insulate-gate bipolar transistor,绝缘栅双极晶体管)作为驱动器的开关器件,若需在相同功率等级下提升驱动器的控制频率,往往需要使用如sic-mosfet(sic-metal-oxide-semiconductor field-effect transistor,碳化硅金氧半场效晶体管)这类的高耐压高开关频率的新型器件。然而,此类新型器件仍然昂贵,使得系统成本的显著增加。另一个解决方案是使用多电平逆变器为电机供电,多电平逆变器具有器件电压应力小、输出谐波小等优点。
3、传统的多电平逆变器主要包括中点箝位(neutral-point-clamped,npc)、飞电容(flying capacitor,fc)逆变器和级联h桥(cascaded h-bridge,chb)逆变器。在实际应用中,采用高阶多电平逆变器可以获得更好的电能质量。然而,高阶多电平逆变器需要更多的器件,会带动驱动成本的增加。此外,开关器件和电容器的增加将使系统更加复杂,并降低其可靠性。
4、开绕组永磁同步电机(open-winding permanent magnet synchronous motor,ow-pmsm)将电机的中性点打开,并将绕组的两端连接到两个两电平逆变器上。与传统的多电平逆变器相比,开绕组电机驱动同样可以实现多电平特性而且不需要额外的箝位二极管和电容器。此外,开绕组电机驱动器还具有调制范围更大、容错能力更好和冗余更多的优点。根据两组逆变器的供电方式,开绕组电机驱动器有三种典型的拓扑结构:公共直流母线拓扑、隔离直流母线拓扑和带浮动电容器的混合拓扑。公共直流母线拓扑具有成本较低的优点。然而,由于拓扑中存在零序路径,必须采取措施抑制零序电流。在隔离直流母线拓扑中,双逆变器的电压源是独立的,可以有效地消除zsc的问题。带浮动电容器的混合拓扑也可以避免零序电流问题,且与隔离直流母线拓扑相比成本更低。然而,带浮动电容器的混合拓扑需要专门的控制来平衡电容器电压。因此,选择隔离直流母线拓扑结构可以获得更稳定的供电,且由于两侧电源是独立的,具备更好的灵活性。通过将两侧电源的电压比设置为2:1或3:1,可以获得等效的四电平或五电平输出,实现更高的精度和更好的电能质量。
5、但是,两个电源驱动器成本增加,使得此类拓扑的应用受到限制。
技术实现思路
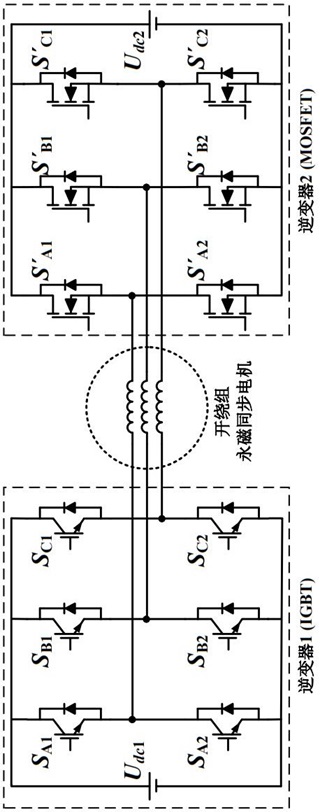
1、针对现有技术中存在的上述技术问题,本发明的目的在于克服现有技术的不足,提供一种用于开绕组电机的混合逆变器及其调制方法。其中,该混合逆变器两侧使用不同的电力电子开关器件,具体地,该逆变器包括:
2、包括高压侧逆变器i1、低压侧逆变器i2和控制器;
3、其中,逆变器i1、逆变器i2的交流端分别与开绕组电机连接,且分别采用igbt、mosfet作为开关器件;
4、控制器用于控制各igbt、mosfet。
5、此外,本发明还提供了一种上述的混合逆变器的调制方法,如高压侧电压 u dc1与低压侧电压 u dc2之比为2:1,包括以下步骤:
6、步骤s1:确定参考矢量;
7、步骤s11:采集开绕组电机的转速,并设定参考转速;通过pi控制器进行转速偏差控制计算并投射到 d- q平面,得到参考电流、参考电流;
8、步骤s12:采集开绕组电机输出的a、b、c三相电流,变换坐标并投射到 d- q平面,得到电流 id、电流 iq;
9、步骤s13:基于参考电流、参考电流、电流 id、电流 iq,通过pi控制器得到参考电压、参考电压;
10、步骤s14:将参考电压和参考电压转化至 α- β坐标,并保持相位偏移角度为180°,得到参考电压、参考电压;
11、步骤s15:基于参考电压、参考电压,确定参考矢量的长度 v l;
12、;
13、公式中,为参考矢量的最大长度;
14、步骤s16:根据参考矢量的长度 v l和参考矢量与 α- β坐标系中 α轴的夹角确定参考矢量,其中,
15、;
16、公式中, u α、 u β分别为参考矢量在 α- β坐标系中 α轴和 β轴上的投影长度;
17、步骤s2:根据将矢量平面划分为6个主扇区,
18、;
19、步骤s3:将每一主扇区均等划分为9个子扇区,并编号1至9;
20、步骤s4:确定参考矢量所在子扇区的定位:
21、扇区将任一主扇区转化到主扇区i进行参考矢量所在子扇区的定位;
22、在六十度坐标系 g- h中,
23、;
24、公式中, v g、 v h分别为参考矢量在 g轴和 h轴上的投影长度;
25、分别计算 v g、 v h与的比值 r g、 r h,
26、;
27、根据 r g、 r h定位参考矢量所在子扇区,
28、;
29、步骤s5:将逆变器i1的参考矢量分配给逆变器i1和逆变器i2;
30、根据参考矢量所在子扇区,选择参考矢量分配给逆变器i1;
31、对分配给逆变器i2的参考矢量,存在:
32、;
33、步骤s6:采用箝位调制获取逆变器i1的pwm调制波,用以控制igbt;
34、对逆变器i1的参考矢量,逆变器i1存在基础矢量000~111;其中,1、0表示a、b、c相电压各自的高低电平状态;000、111为零矢量,001、010、011、100、101、110为有效矢量;
35、步骤s61:合成参考矢量;
36、当参考矢量位于子扇区1时,选择零矢量000作为输出产生参考矢量;
37、当参考矢量位于子扇区2、4、5、6、8、9中时,选择距其最近的单个有效矢量作为输出合成参考矢量;
38、当参考矢量位于子扇区7时,选择当前主扇区的两个有效矢量合成参考矢量;其中,任一有效矢量的作用时间为半个控制周期;
39、当参考矢量位于子扇区3时,选择距其最近的有效矢量和零矢量合成;其中,有效矢量的作用时间为半个控制周期,零矢量满足合成参考矢量时,逆变器i1中只有一相桥臂发生开关动作;
40、步骤s62:通过基础矢量的作用顺序获取逆变器i1的pwm调制波,用以控制igbt;
41、步骤s7:计算在 α- β坐标系 α轴和 β轴上的投影长度、;
42、;
43、公式中,、为在 α- β坐标系 α轴和 β轴上的投影长度;
44、将、取反后输入svpwm算法,计算得到逆变器i2的pwm调制波,用以控制mosfet。
45、可替换的,本发明还提供了一种上述混合逆变器在高压侧电压 u dc1与低压侧电压 u dc2之比为3:1时,包括以下步骤:
46、步骤s1:确定参考矢量;
47、步骤s11:采集开绕组电机的转速,并设定参考转速;通过pi控制器进行转速偏差控制计算并投射到 d- q平面,得到参考电流、参考电流;
48、步骤s12:采集开绕组电机输出的a、b、c三相电流,变换坐标并投射到 d- q平面,得到电流 id、电流 iq;
49、步骤s13:基于参考电流、参考电流、电流 id、电流 iq,通过pi控制器得到参考电压、参考电压;
50、步骤s14:将参考电压和参考电压转化至 α- β坐标,并保持相位偏移角度为180°,得到参考电压、参考电压;
51、步骤s15:基于参考电压、参考电压,确定参考矢量的长度 v l;
52、;
53、公式中,为参考矢量的最大长度;
54、步骤s16:根据参考矢量的长度 v l和参考矢量与 α- β坐标系中 α轴的夹角确定参考矢量,其中,
55、;
56、公式中, u α、 u β分别为参考矢量在 α- β坐标系中 α轴和 β轴上的投影长度;
57、步骤s2:根据将矢量平面划分为6个主扇区,
58、;
59、步骤s3:将每一主扇区均等划分为16个子扇区,并编号1至16;
60、步骤s4:确定参考矢量所在子扇区的定位:
61、扇区将任一主扇区转化到主扇区i进行参考矢量所在子扇区的定位;
62、在六十度坐标系 g- h中,
63、;
64、公式中, v g、 v h分别为参考矢量在 g轴和 h轴上的投影长度;
65、分别计算 v g、 v h与的比值 r g、 r h,
66、;
67、根据 r g、 r h定位参考矢量所在子扇区,
68、;
69、步骤s5:将逆变器i1的参考矢量分配给逆变器i1和逆变器i2;
70、根据参考矢量所在子扇区,选择参考矢量分配给逆变器i1;
71、对分配给逆变器i2的参考矢量,存在:
72、;
73、步骤s6:采用箝位调制获取逆变器i1的pwm调制波,用以控制igbt;
74、对逆变器i1的参考矢量,逆变器i1存在基础矢量000~111;其中,1、0表示a、b、c相电压各自的高低电平状态;000、111为零矢量,001、010、011、100、101、110为有效矢量;
75、步骤s61:合成参考矢量;
76、当参考矢量位于子扇区1时,选择零矢量000作为输出产生参考矢量;
77、当参考矢量位于子扇区5、9、10、11、15、16中时,选择距其最近的单个有效矢量作为输出合成参考矢量;
78、当参考矢量位于子扇区2、3、4时,选择距其最近的有效矢量和零矢量合成;其中,零矢量的作用时间为2/3控制周期,有效矢量的作用时间为1/3控制周期;
79、当参考矢量位于子扇区6、8时,选择距其最近的有效矢量和零矢量合成;其中,零矢量的作用时间为1/3控制周期,有效矢量的作用时间为2/3控制周期;零矢量满足合成参考矢量时,逆变器i1中只有一相桥臂发生开关动作;
80、当参考矢量位于子扇区7、12、13、14时,选择当前主扇区的两个有效矢量合成;其中,距其近的有效矢量的作用时间为2/3控制周期,距其远的有效矢量的作用时间为1/3控制周期;
81、步骤s62:通过基础矢量的作用顺序获取逆变器i1的pwm调制波,用以控制igbt;
82、步骤s7:计算在 α- β坐标系 α轴和 β轴上的投影长度、;
83、;
84、公式中,、为在 α- β坐标系 α轴和 β轴上的投影长度;
85、将、取反后输入svpwm算法,计算得到逆变器i2的pwm调制波,用以控制mosfet。
86、与现有技术相比,本发明的有益效果为:
87、本发明提出的用于开绕组电机的混合逆变器可在降低驱动器的成本基础上利用igbt高耐压以及mosfet高开关频率的优点,降低igbt的开关频率与mosfet的需耐受电压。
- 还没有人留言评论。精彩留言会获得点赞!