三相爪极步进电机驱动方法及系统与流程
本发明涉及电机控制,尤其涉及一种三相爪极步进电机驱动方法及系统。
背景技术:
1、现有的三相爪极步进电机的爪部设计存在问题,矩形的爪部会导致电机的齿槽转矩偏大,在运行的过程中引入较大的转矩脉动;三角形的爪部设计降低永磁体的利用率,会导致电机的转矩降低。
2、三相爪极步进电机原始的驱动办法为开环6步强拖,使用这种驱动方式的原因是爪极步进电机是一种低成本的开环类伺服电机,即在爪极步进电机的输出转矩能满足负载需求时,步进电机可以保证不失步,达到给一个脉冲行进一个步距角的效果。这种驱动方式存在一种问题,因为其轴向叠放的结构,同一个时刻只有2/3的永磁体被利用,因此会造成电机性能的浪费。同时,使用这种“六步驱动”的方式,三相爪极步进电机的电流很难受到合理的控制,无法控制电流将导致运行时电流的谐波大,电机运行噪音以及抖动都比较大。这种驱动方式必然导致三相爪极步进电机在驱动时效率低且发热严重、动态响应能力差、运行噪声以及噪音大、输出转矩受限等问题。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种三相爪极步进电机驱动方法及系统,旨在解决三相爪极步进电机在驱动时效率低的技术问题。
2、为实现上述目的,本发明提供一种三相爪极步进电机驱动方法,所述三相爪极步进电机驱动方法应用于三相爪极步进电机驱动系统,包括:
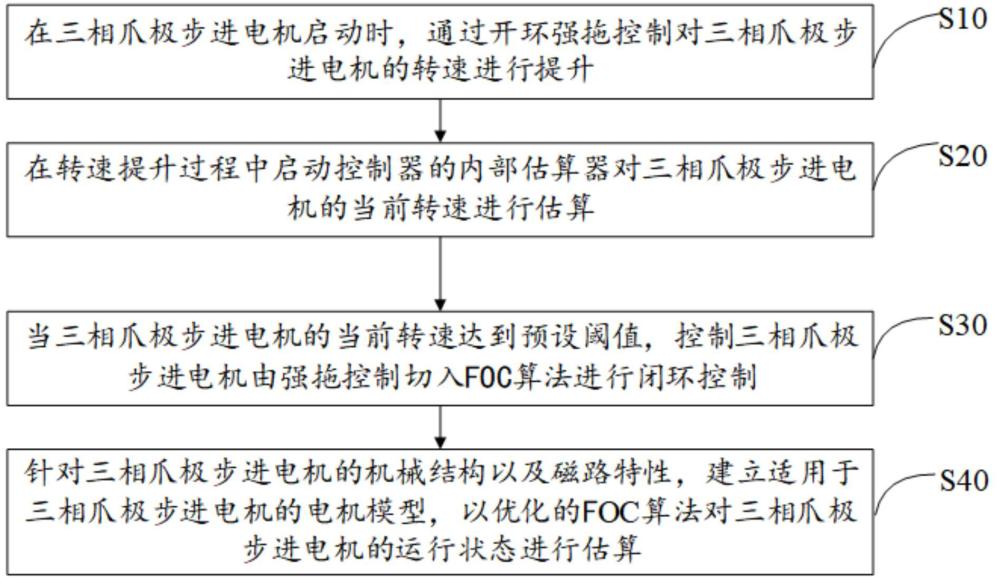
3、在三相爪极步进电机启动时,通过开环强拖控制对所述三相爪极步进电机的转速进行提升;
4、在转速提升过程中启动控制器的内部估算器对所述三相爪极步进电机的当前转速进行估算;
5、当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入foc算法进行闭环控制;
6、针对所述三相爪极步进电机的机械结构以及磁路特性,建立适用于所述三相爪极步进电机的电机模型,以优化的foc算法对所述三相爪极步进电机的运行状态进行估算。
7、可选地,所述当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入闭环控制之后,还包括:
8、通过采集三相爪极步进电机的三相电流,输入估算器,通过所述估算器估算所述三相爪极步进电机的转子位置以及转速;
9、当所述三相爪极步进电机的运行转速降到预设阈值以下时,由闭环控制切入强拖运行控制。
10、可选地,所述三相爪极步进电机包括u相、v相和w相;当所述u相上桥导通记为1,当所述u相下桥导通记为0;当所述v相上桥导通记为1,当所述v相下桥导通记为0;当所述w相上桥导通记为1,当所述w相下桥导通记为0;
11、使用svpwm的斩波方式,对u、v、w的三相进行斩波;
12、通过所述斩波方式控制所述三相爪极步进电机的三相绕组生成电磁场的方向;
13、在所述三相爪极步进电机启动时,利用所述电磁场的方向通过开环强拖控制对所述三相爪极步进电机的转速进行提升。
14、可选地,所述在三相爪极步进电机启动时,通过开环强拖控制对所述三相爪极步进电机的转速进行提升,包括:
15、在三相爪极步进电机启动时,通过所述三相爪极步进电机的转子所受到的三相绕组合成的磁矢量方向进行强拖换向,控制所述三相爪极步进电机的转速进行提升。
16、可选地,所述当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入foc算法进行闭环控制之前,包括:
17、采集所述三相爪极步进电机的三相的相电流;
18、将采集到的所述相电流转换为两相静态αβ坐标系下的αβ轴电流;
19、将所述两相静态坐标系下的αβ轴电流转换为两相动态坐标系下的dq轴电流;
20、通过控制器对所述两相动态坐标系下的dq轴电流进行pi调节,控制输出到三相爪极步进电机的三相电流的大小、幅值和相位;
21、同时将采集到的电流输入针对三相爪极步进电机进行过特别优化的电机模型,估算当前电机转子的角度;
22、所述当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入foc算法进行闭环控制,包括:
23、当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入优化后的foc算法进行闭环控制。
24、可选地,所述当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入优化后的foc算法进行闭环控制之后,包括:
25、根据估算器输出的角度对电机的dq轴电流进行反park变换和反clark变换得到目标三相相电压;
26、通过svpwm对所述目标三相相电压进行斩波,以使所述三相爪极步进电机u、v、w三相的桥臂在同一时刻均导通,进而使所述三相爪极步进电机的三相电流波形处于预设范围。
27、可选地,所述在转速提升过程中启动控制器的内部估算器对所述三相爪极步进电机的当前转速进行估算的步骤,包括:
28、所述三相爪极步进电机使用的是轴向堆叠的结构,三相位于同一轴线上,因此在针对电机的相电压建立电机模型时,需要引入另外两相绕组引起的互感,其中,所述三相爪极步进电机的轴向堆叠结构每一相的磁链为永磁体总磁链的1/3,故在建立电机模型时,需将所述永磁体总磁链的1/3也进行考虑;
29、通过所述电机模型,建立适用于所述三相爪极步进电机的估算器;
30、在运行的过程中,根据实时位置启动控制器内部的所述估算器对所述三相爪极步进电机的转子的实时位置进行估算;
31、通过所述三相爪极步进电机的转子的实时位置得到所述三相爪极步进电机的转速。
32、可选地,所述当所述三相爪极步进电机的当前转速达到预设阈值,控制所述三相爪极步进电机由强拖控制切入闭环控制之后,还包括:
33、当需要停止所述三相爪极步进电机时,根据输入的位置信号计算出所述三相爪极步进电机的目标位置;
34、通过控制器输入指向所述目标位置的磁矢量,以使所述三相爪极步进电机停在所述目标位置。
35、本发明还提供三相爪极步进电机驱动一种三相爪极步进电机驱动系统,所述三相爪极步进电机驱动系统包括:三相爪极步进电机、驱动单元、控制器和电源单元:
36、所述控制器分别与所述三相爪极步进电机和驱动单元连接,所述驱动单元与所述三相爪极步进电机连接,所述电源单元分别与所述控制器和所述驱动单元连接;
37、所述电源单元,用于输出电源电压为所述控制器以及所述驱动单元进行供电;
38、所述控制器,用于检测所述三相爪极步进电机的三相电参数,并基于所述三相电参数的频率以及幅值输出对应的驱动信号至所述驱动单元;
39、所述驱动单元,用于对所述三相爪极步进电机的目标三相相电压进行斩波;
40、所述驱动单元,还用于在接收到所述驱动信号时,驱动所述三相爪极步进电机按照所述驱动信号对应的运行参数运行。
41、可选地,所述三相爪极步进电机,包括一种梯形爪结构,其中,所述梯形爪结构的上底与下底的比例为预设大小,所述梯形爪结构的高为预设长度;
42、所述梯形爪结构,用于维持所述三相爪极步进电机达到预设保持转矩,并降低所述三相爪极步进电机的制动转矩。
43、本发明给出了一种三相爪极步进电机的爪形设计以及其爪形尺寸的参数范围,可以保证电机在拥有足够大的转矩输出的同时又有很小的齿槽转矩;还对foc算法进行针对性优化,使其适配于三相爪极步进电机,保证能够达到三相爪极步进电机对位置控制精度要求的同时提高电机的效率、降低发热、提高动态响应能力、保证在高速时的运行更加稳定,同时输出更大的转矩;针对三相爪极步进电机的应用需求,提出了一种适配foc和三相爪极步进电机的驱动策略,在保证其位置精度的同时将foc算法的优点也尽可能的发挥。
- 还没有人留言评论。精彩留言会获得点赞!