直流有刷电机的控制方法、装置、设备及存储介质与流程
本技术涉及电机控制,尤其是涉及直流有刷电机的控制方法、装置、设备及存储介质。
背景技术:
1、直流有刷电机是一种将电能转化为旋转动能的电机,具有结构简单、易于控制、成本低等特点;直流有刷电机的工作原理是基于电磁学原理的,即通电导体在磁场中受到安培力的作用,使电枢线圈产生电磁转矩,驱动电机旋转,为了保证电磁转矩的方向不变,需要配合换向器和电刷对电枢线圈中的电流进行换向,使电机能够连续地旋转。
2、相关技术手段中,直流有刷电机的控制方法主要有两种,一种是通过改变电机电枢两端的电压来调节电机的转速,另一种是通过改变电机励磁绕组的电流来调节电机的转矩;为了实现这两种控制方法,需要使用h桥电路的驱动电路,它可以实现对电机的正反转、启停和调速等功能。
3、针对上述技术方案,虽然通过h桥电路的驱动电路,可以实现对电机的正反转、启停和调速,但在电机运行和控制的过程中,存在着电机在不同的电源和负载条件下,电机的转速和转矩的出现不易控制,导致电机的功率和效率下降的问题。
技术实现思路
1、为了改善电机在不同的电源和负载条件下,电机的转速和转矩的出现不易控制,导致电机的功率和效率下降的问题,本技术提供直流有刷电机的控制方法、装置、设备及存储介质。
2、本发明提供了一种直流有刷电机的控制方法,包括以下步骤:
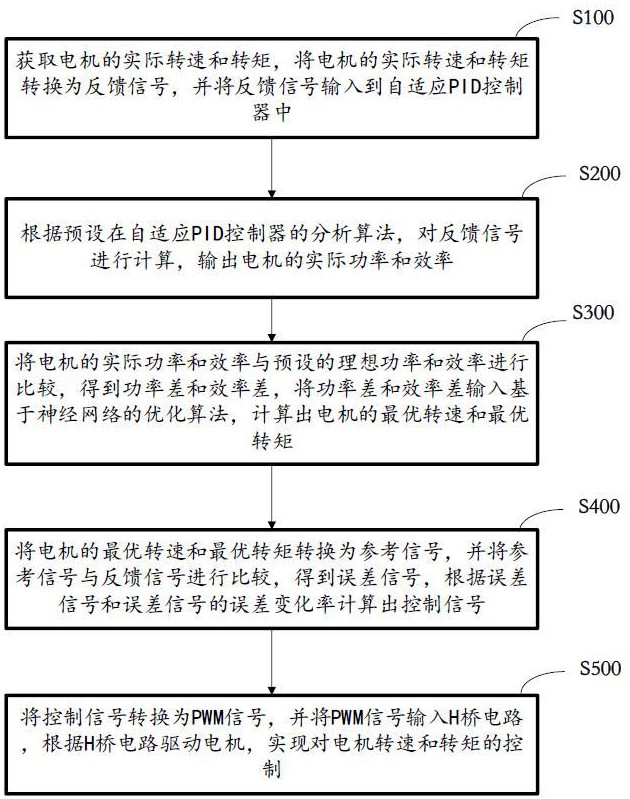
3、获取电机的实际转速和转矩,将所述电机的实际转速和转矩换为反馈信号,并将所述反馈信号输入到自适应pid控制器中;根据预设在所述自适应pid控制器的分析算法,对所述反馈信号进行计算,输出所述电机的实际功率和效率;将所述电机的实际功率和效率与预设的理想功率和效率进行比较,得到功率差和效率差,将所述功率差和所述效率差输入基于神经网络的优化算法,计算出所述电机的最优转速和最优转矩;将所述电机的最优转速和最优转矩换为参考信号,并将所述参考信号与所述反馈信号进行比较,得到误差信号,根据所述误差信号和所述误差信号的误差变化率计算出控制信号;将所述控制信号转换为pwm信号,并将所述pwm信号输入h桥电路,根据所述h桥电路驱动所述电机,实现对所述电机转速和转矩的控制。
4、作为优选方案,所述获取电机的实际转速和转矩,将所述电机的实际转速和转矩换为反馈信号的步骤,包括:根据传感器获取电机的实际转速和转矩,将所述电机的实际转速和转矩通过转换器转换为数字信号,将所述数字信号作为所述反馈信号,并对所述反馈信号进行滤波处理。
5、作为优选方案,所述根据预设在所述自适应pid控制器的分析算法,对所述反馈信号进行计算,输出所述电机的实际功率和效率的步骤,包括:根据所述反馈信号,计算所述电机的实际电压和电流;根据所述电机的实际电压和电流,计算所述电机的实际功率和效率。
6、作为优选方案,所述基于神经网络的优化算法的训练步骤,包括:获取训练数据,所述训练数据包括训练功率差以及训练效率差;将所述训练功率差和所述训练效率差由所述神经网络的输入层输入所述神经网络的隐藏层;其中,所述神经网络的隐藏层为若干个神经元,每个所述神经元的激活函数为双曲正切函数;所述神经网络的隐藏层的权重矩阵和偏置向量为随机值;所述隐藏层的输出结果输入到所述神经网络的输出层;所述输出层根据所述隐藏层的输出结果计算所述神经网络的输出值,并与所述神经网络的期望输出值进行比较,得到误差值;根据所述误差值,采用反向传播算法,更新所述隐藏层的权重矩阵和偏置向量,使所述误差值逐渐减小;重复上述步骤,直到所述误差值小于预先设定的阈值,或者迭代次数达到预先确定的值,得到所述基于神经网络的优化算法。
7、作为优选方案,计算所述电机的最优转速和最优转矩的步骤,包括:根据所述基于神经网络的优化算法,将所述功率差和所述效率差由所述神经网络的输入层输入所述神经网络的隐藏层;根据所述神经网络的隐藏层的权重矩阵和偏置向量,计算所述隐藏层的输出结果,并将所述隐藏层的输出结果输入到所述神经网络的输出层;根据所述神经网络的输出层的权重矩阵和偏置向量,计算所述神经网络的输出值,将所述神经网络的输出值作为所述电机的最优转速和最优转矩。
8、作为优选方案,所述将所述电机的最优转速和最优转矩换为参考信号,并将所述参考信号与所述反馈信号进行比较,得到误差信号的步骤,包括:将所述参考信号与反馈信号进行减法运算,得到所述误差信号;
9、对所述误差信号进行归一化处理,使所述误差信号在预设好的范围内。
10、作为优选方案,所述自适应pid控制器是基于模糊逻辑的一个控制器;所述根据所述误差信号和所述误差信号的误差变化率计算出控制信号的步骤,包括:根据所述误差信号的当前值和所述误差信号上一次的值进行减法运算,得到所述误差变化率; 将所述误差信号和所述误差变化率分别划分为若干个模糊集合,并定义相应的隶属度函数;根据所述误差信号和所述误差变化率的实际值,确定所述误差信号和所述误差变化率的实际值隶属于各个模糊集合的程度,并对所述误差信号和所述误差变化率的实际值进行模糊化处理,得到模糊输入;将所述模糊输入代入至预先设定的模糊规则表,得到模糊输出,将所述模糊输出作为所述自适应pid控制器的参数调整量;对所述参数调整量去模糊化处理,得到所述自适应pid控制器的参数的实际调整量,并将所述实际调整量作为控制信号。
11、本技术还提供了一种直流有刷电机的控制装置,包括:检测模块,用于获取电机的实际转速和转矩,将所述电机的实际转速和转矩换为反馈信号,并将所述反馈信号输入到自适应pid控制器中;计算模块,用于根据预设在所述自适应pid控制器的分析算法,对所述反馈信号进行计算,输出所述电机的实际功率和效率;输出模块,用于将所述电机的实际功率和效率与预设的理想功率和效率进行比较,得到功率差和效率差,将所述功率差和所述效率差输入基于神经网络的优化算法,计算出所述电机的最优转速和最优转矩;控制模块,用于将所述电机的最优转速和最优转矩换为参考信号,并将所述参考信号与所述反馈信号进行比较,得到误差信号,根据所述误差信号和所述误差信号的误差变化率计算出控制信号;传输模块,用于将所述控制信号转换为pwm信号,并将所述pwm信号输入h桥电路,根据所述h桥电路驱动所述电机,实现对所述电机转速和转矩的控制。
12、本技术还提供了一种电子设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现上述任一项所述的直流有刷电机的控制方法。
13、本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器运行时使得所述处理器执行如上述任一项所述的直流有刷电机的控制方法。
14、与现有技术相比,本技术具有以下有益效果:适应性高、便于控制。通过自适应pid控制器实现对电机的实时监测和调节,使电机能够适应不同的电源和负载条件,保证了电机的稳定性和可靠性,再通过基于神经网络的优化算法,计算出电机的最优转速和最优转矩,实现对电机的精确控制,使电机能够按照最优的转速和转矩运行,改善电机在不同的电源和负载条件下,电机的转速和转矩的出现不易控制,导致电机的功率和效率下降的问题。
- 还没有人留言评论。精彩留言会获得点赞!