可再生能源电力系统实时发电调控方法及相关装置与流程
本发明涉及可再生能源电力系统运行与控制,特别涉及一种可再生能源电力系统实时发电调控方法及相关装置,该方法适用于可再生能源组成的电网实时发电最优调控。
背景技术:
1、持续不断的气候变化所带来的潜在威胁推动了社会对低碳甚至负碳可持续能源系统可能性的讨论。作为节能降耗的主力军,电力系统在实现可持续发展的进程中任重道远,电力能源结构转型势在必行。伴随以风能和光伏为代表的可再生能源发电技术日益成熟,其在电力系统中的供电比例日渐提升,电力系统逐步向可再生能源系统转型。
2、可再生能源电力系统可定义为电力供应完全来自可再生能源(如水电、风电、光伏发电等)和储能系统(energy storage system, ess)的电力系统。然而,诸如风电、光伏发电固有的随机性和波动性给可再生能源电力系统的安全、稳定、经济运行来了巨大挑战。由此,如何优化调控可再生能源电力系统中的各电源模块,实现自动发电控制(automaticgeneration control, agc)机组的功率最优调配,确保系统的安全、经济运行对电力系统绿色转型至关重要。
3、本质上,上述问题是一个多约束的非线性优化问题。在实际工程中,对此不做优化,常按可调容量比例、爬坡速度排序等方式进行功率分配,难以达到最优控制的目的。传统数学优化方法(例如拉格朗日乘子法、内点法)虽求解速度快,但全局搜索能力差,容易陷入局部最优解。与之相比,以遗传算法(genetic algorithm, ga)、粒子群优化(particleswarm optimization, pso)、模拟退火(simulated annealing algorithm, sa)为代表的智能优化算法具备更高的灵活性和实用性。然而,由于不能很好的平衡全局探索和局部搜索,上述算法在复杂的系统优化中常出现收敛速度慢、精度低和稳定性差等问题。因此,亟需开发寻优性能更好的智能优化算法用于 resps实时发电最优调控。
技术实现思路
1、本发明的目的在于克服现有技术的缺点与不足,提供一种可再生能源电力系统(renewable energy sources power system, resps)的实时发电最优调控方法及相关装置,该方法在猫鼬优化算法优化下获得最优均衡策略,从而实现 resps的自动发电控制(automatic generation control, agc)机组实时发电最优调控,具备稳定、精准、快速的控制性能,即能确保电力系统安全、稳定运行的同时,最大限度的降低其运行成本。
2、本发明的目的通过下述技术方案实现:一种可再生能源电力系统实时发电调控方法,包括以下步骤:
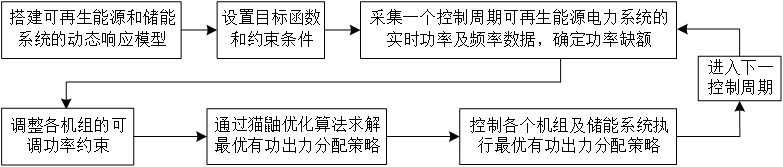
3、搭建可再生能源和储能系统的动态响应模型;
4、设置所述动态响应模型的目标函数和约束条件;
5、采集当前控制周期可再生能源电力系统的实时功率及频率数据,确定总功率缺额;
6、根据采集的实时功率及频率数据调整所述约束条件中各机组的可调功率约束;
7、基于设置的目标函数和调整后的约束条件,通过猫鼬优化算法求解所述动态响应模型中可调机组间的最优有功出力分配策略;
8、控制各个机组及储能系统执行所述最优有功出力分配策略。
9、进一步的,所述可再生能源和储能系统的动态响应模型采用频率模型的拉普拉斯逆变换来表示,如下:
10、
11、式中,m和分别表示第m种自动发电控制机组及其对应的调整延时,m=1、2、3、4分别表示水电机组、风电机组、光伏电站和储能系统;t和分别代表时间和控制周期;和分别代表第m种agc机组的期望输出功率和实际输出功率;k和k分别为第k个控制周期和最大控制周期;表示第m种agc机组的传递函数,表示为:
12、
13、式中,t*代表传递函数的已知参数(*∈{1, 2, 3, 4, r, e})。
14、进一步的,所述动态响应模型的目标函数f设置如下:
15、
16、式中,m为agc机组的总数,目标函数f的优化目标是最小化系统的总功率偏差,通过agc机组的期望功率与实际输出功率偏差绝对值之和表征;
17、所述约束条件考虑功率平衡、机组容量和爬坡约束,如下:
18、
19、式中,分别代表第m种agc机组的可调功率上、下限和最大爬坡速率;为第k个控制周期的agc机组的总期望输出,即系统的总功率缺额。
20、进一步的,所述采集当前控制周期可再生能源电力系统的实时功率及频率数据,确定总功率缺额,具体包括:采集当前控制周期系统的实时频率偏差,获得电网的功率偏差,根据功率偏差计算出当前的总功率缺额。
21、进一步的,所述根据采集的实时功率及频率数据调整所述约束条件中各机组的可调功率约束,具体包括:所述可调约束根据采集的当前机组功率数据调整,用机组的出力上限减去当前出力得到可调功率上限,用当前功率减去下限得到可调功率下限。
22、进一步的,所述通过猫鼬优化算法求解所述动态响应模型中可调机组间的最优有功出力分配策略的步骤如下:
23、步骤1:初始化算法参数及猫鼬的空间位置,设置迭代次数it=1,其中,个体决策通过解向量表示为:
24、式中,表示第h只猫鼬的初始决策;分别表示水电机组、风电机组、光伏电站和储能系统的功率分配指令;是0~1范围内的正态分布随机数;分别代表第m个决策变量的可调上、下限;
25、步骤2:计算个体适应度并选择最佳个体,通过公式(4)计算猫鼬当前的适应度值,并将适应度值最小的猫鼬确定最佳猫鼬,其决策为;
26、步骤3:安全搜索,猫鼬根据捕食者和警报的存在与否选择行为,在0~1的随机数r1小于安全边界sa的安全条件下,猫鼬个体以相同的概率捕食或搜索食物,表示为:
27、
28、式中,sp是随迭代次数增大而变小的更新步长,确保了算法的收敛性,定义如下:
29、
30、式中,it代表最大迭代次数;r2为0~1的常数;
31、此外,若0~1范围内随机数r3>crate,则随机选择其他个体进行协同搜索和狩猎,表示为
32、
33、式中,表示从所有个体中随机选择的协作个体的空间位置;rand表示0~1的随机数;crate为搜索模式控制因子;
34、步骤4:险境搜索,若不满足安全条件,即r1≥sa时,表明猫鼬身处险境,与天敌决斗或选择逃跑,表示为
35、
36、式中,分别代表决斗策略和逃跑策略;
37、步骤5:随机搜索,为了找到尽可能多的食物,猫鼬群体在每次迭代时,若rand<pgs,进行如下随机搜索
38、
39、式中,le为levy表达式,如下:
40、
41、表示服从正态分布的方向向量,pgs为随机搜索概率。
42、步骤6:通过公式(4)更新猫鼬群体的适应度值并选择最佳猫鼬;
43、步骤7:判断是否需要继续迭代,若it≥it,输出当前最佳猫鼬的决策和适应度值;否则返回步骤3继续寻优。
44、一种可再生能源电力系统实时发电调控装置,包括:
45、动态响应模型建立模块,用于搭建可再生能源和储能系统的动态响应模型;
46、模型设置模块,用于设置所述动态响应模型的目标函数和约束条件;
47、数据采集模块,用于采集当前控制周期可再生能源电力系统的实时功率及频率数据;
48、约束条件调整模块,用于根据采集的实时功率及频率数据调整所述约束条件中各机组的可调功率约束;
49、模型求解模块,用于基于设置的目标函数和调整后的约束条件,通过猫鼬优化算法求解所述动态响应模型中可调机组间的最优有功出力分配策略;
50、策略执行模块,用于控制各个机组及储能系统执行所述最优有功出力分配策略。
51、进一步的,所述动态响应模型建立模块搭建可再生能源和储能系统的动态响应模型时,具体采用频率模型的拉普拉斯逆变换来表示,如下:
52、
53、式中,m和分别表示第m种自动发电控制机组及其对应的调整延时,m=1、2、3、4分别表示水电机组、风电机组、光伏电站和储能系统;t和分别代表时间和控制周期;和分别代表第m种agc机组的期望输出功率和实际输出功率;k和k分别为第k个控制周期和最大控制周期;表示第m种agc机组的传递函数,表示为:
54、
55、式中,t*代表传递函数的已知参数(*∈{1, 2, 3, 4, r, e})。
56、进一步的,所述动态响应模型的目标函数f设置如下:
57、
58、式中,m为agc机组的总数,目标函数f的优化目标是最小化系统的总功率偏差,通过agc机组的期望功率与实际输出功率偏差绝对值之和表征;
59、所述约束条件考虑功率平衡、机组容量和爬坡约束,如下:
60、
61、式中,分别代表第m种agc机组的可调功率上、下限和最大爬坡速率;为第k个控制周期的agc机组的总期望输出,即系统的总功率缺额。
62、进一步的,所述策略执行模块通过猫鼬优化算法求解所述动态响应模型中可调机组间的最优有功出力分配策略的步骤如下:
63、步骤1:初始化算法参数及猫鼬的空间位置,设置迭代次数it=1,其中,个体决策通过解向量表示为:
64、式中,表示第h只猫鼬的初始决策;分别表示水电机组、风电机组、光伏电站和储能系统的功率分配指令;是0~1范围内的正态分布随机数;分别代表第m个决策变量的可调上、下限;
65、步骤2:计算个体适应度并选择最佳个体,通过公式(4)计算猫鼬当前的适应度值,并将适应度值最小的猫鼬确定最佳猫鼬,其决策为;
66、步骤3:安全搜索,猫鼬根据捕食者和警报的存在与否选择行为,在0~1的随机数r1小于安全边界sa的安全条件下,猫鼬个体以相同的概率捕食或搜索食物,表示为:
67、
68、式中,sp是随迭代次数增大而变小的更新步长,确保了算法的收敛性,定义如下:
69、
70、式中,it代表最大迭代次数;r2为0~1的常数;
71、此外,若0~1范围内随机数r3>crate,则随机选择其他个体进行协同搜索和狩猎,表示为
72、
73、式中,表示从所有个体中随机选择的协作个体的空间位置;rand表示0~1的随机数;crate为搜索模式控制因子;
74、步骤4:险境搜索,若不满足安全条件,即r1≥sa时,表明猫鼬身处险境,与天敌决斗或选择逃跑,表示为
75、
76、式中,分别代表决斗策略和逃跑策略;
77、步骤5:随机搜索,为了找到尽可能多的食物,猫鼬群体在每次迭代时,若rand<pgs,进行如下随机搜索
78、
79、式中,le为levy表达式,如下:
80、
81、表示服从正态分布的方向向量,pgs为随机搜索概率。
82、步骤6:通过公式(4)更新猫鼬群体的适应度值并选择最佳猫鼬;
83、步骤7:判断是否需要继续迭代,若it≥it,输出当前最佳猫鼬的决策和适应度值;否则返回步骤3继续寻优。
84、一种可再生能源电力系统实时发电调控系统,包括:计算机可读存储介质和处理器;
85、所述计算机可读存储介质用于存储可执行指令;
86、所述处理器用于读取所述计算机可读存储介质中存储的可执行指令,执行所述的可再生能源电力系统实时发电调控方法。
87、一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现所述的可再生能源电力系统实时发电调控方法。
88、本发明相对于现有技术具有如下的优点及效果:
89、(1)本发明构建了考虑水电站、风电厂、光伏电站和储能系统相结合的可再生能源发电系统,相比传统的发电系统更加清洁和长效,在围绕“双碳目标”提出的一系列政策趋势下,具备良好的可行性和广阔的应用前景。
90、(2)本发明的发电控制方法根据电网的实时频率偏差值及各机组的实时有功功率可调范围来确定系统的总功率缺额,以最小化功率偏差为目标,通过猫鼬优化算法获得最佳功率分配决策,进而最小化系统的频率偏差,为可再生能源电力系统的安全、稳定运行提供了强有力的支撑,相比传统工程中按可调容量比例分配发电功率的方法,更具科学性和安全性。
91、(3)本发明采用的猫鼬优化算法通过安全搜索、险境搜索和随机搜索进行协调寻优,很好地权衡了全局搜索和局部搜索,相比传统的数学优化算法和常规的启发式算法,能以更快的速度、更高的精度和更强的稳定性获得最佳决策方案。
- 还没有人留言评论。精彩留言会获得点赞!