一种实现三个方向上限位的拍板机的制作方法
1.本实用新型涉及自动化生产设备技术领域,具体是一种实现三个方向上限位的拍板机。
背景技术:
2.pcb,中文名称为印制电路板,又称印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气连接的载体。由于它是采用电子印刷工艺制作的,故被称为“印刷”电路板,拍板机为近代pcb板生产常选的自动化设备,其功能是利用滚轮片(以下统称为从动轴)转动起来将pcb板输送到合适位置,然后从动轴与从动轴之间的空间,放置一块铝板,在铝板的底部加装气缸,通过光电感应来控制电磁阀闭合与断开,然后将pcb 板顶起,对其加工。
3.常见的拍板机常常存在,输送快到位后,由于惯性pcb板会有一定的位移,并且在对 pcb板加工时,会出现受力不均匀的情况,板会有所偏移,达不到对该产品的精度要求。
技术实现要素:
4.本实用新型的目的在于提供一种实现三个方向上限位的拍板机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种实现三个方向上限位的拍板机,包括铝板、输送组件、顶升组件、限位组件以及控制组件;
7.所述输送组件用于带动pcb板输送至指定位置;
8.所述顶升组件用于将铝板顶起进行加工;
9.所述限位组件用于防止在顶升过程中发生位移,所述控制组件通过内部控制线路与输送组件、顶升组件以及限位组件连接。
10.作为本实用新型进一步的方案:所述输送组件包括输送支撑机构;
11.所述输送支撑机构表面设置多组滚轮片,所述滚轮片用于带动pcb板输送至指定位置。
12.作为本实用新型再进一步的方案:所述顶升组件包括线性轴承以及顶杆;
13.所述顶杆与线性轴承连接并分布于设备四个角用于固定且顶升铝板的导向。
14.作为本实用新型再进一步的方案:所述顶升组件还包括气缸,所述气缸固定安装在设备底部。
15.作为本实用新型再进一步的方案:所述限位组件包括支撑杆以及限位板;
16.所述支撑杆分布设置在设备前、后、左三个位置,所述设备的右端设置输送pvb板入口,所述限位板安装在铝板的上、下以及左侧位置。
17.作为本实用新型再进一步的方案:所述控制组件包括光电感应开关;
18.所述光电感应开关用于在带动pcb板输送到左边限位处的时候,光电感应开关发
出信号,电机对应的继电器断开,电机停止工作,同时伺服电机来控制后支撑杆,气缸来控制前、左支撑杆,将pcb板固定到指定位置,所述控制伺服电机的继电器闭合,通过气缸将铝板顶起。
19.作为本实用新型再进一步的方案:所述铝板表面镀了一层铁氟龙,所述铁氟龙用于防止表面粘油。
20.作为本实用新型再进一步的方案:所述滚轮片采用的是磁力轮传动方式。
21.与现有技术相比,本实用新型的有益效果是:本专利解决了常规拍板机在拍板时出现的位移,不平稳,加工时受力不均匀,加工精度不高,移动速度需要缓慢等问题,通过支撑杆对pcb板在输送个方向上限位,即解决了位移,不平稳,加工受力不均匀等问题。
附图说明
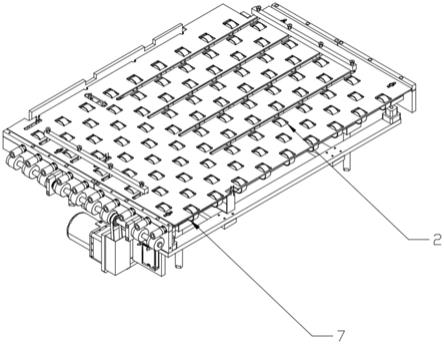
22.图1为一种实现三个方向上限位的拍板机的结构示意图。
23.图2为一种实现三个方向上限位的拍板机中铝板顶升的结构示意图。
24.图3为一种实现三个方向上限位的拍板机中正视的结构示意图。
25.图中:1
‑
支撑杆;2
‑
铝板;3
‑
线性轴承;4
‑
顶杆;5
‑
气缸;6
‑
伺服电机;7
‑
输送支撑机构。
具体实施方式
26.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
27.请参阅图1
‑
3,一种实现三个方向上限位的拍板机,包括铝板2、输送组件、顶升组件、限位组件以及控制组件,所述输送组件用于带动pcb板输送至指定位置,所述顶升组件用于将铝板2顶起进行加工,所述限位组件用于防止在顶升过程中发生位移,所述控制组件通过内部控制线路与输送组件、顶升组件以及限位组件连接。
28.作为本实用新型进一步的方案,所述输送组件包括输送支撑机构7,所述输送支撑机构表面设置多组滚轮片,所述滚轮片用于带动pcb板输送至指定位置。
29.作为本实用新型进一步的方案,所述顶升组件包括线性轴承3以及顶杆4,所述顶杆4 与线性轴承3连接并分布于设备四个角用于固定且顶升铝板2的导向。
30.作为本实用新型进一步的方案,所述顶升组件还包括气缸5,所述气缸5固定安装在设备底部。
31.作为本实用新型进一步的方案,所述限位组件包括支撑杆1以及限位板,所述支撑杆 1分布设置在设备前、后、左三个位置,所述设备的右端设置输送pvb板入口,所述限位板安装在铝板2的上、下以及左侧位置。
32.作为本实用新型进一步的方案,所述控制组件包括光电感应开关,所述光电感应开关用于在带动pcb板输送到左边限位处的时候,光电感应开关发出信号,电机对应的继电器断开,电机停止工作,同时伺服电机来控制后支撑杆1,气缸5来控制前、左支撑杆1,将pcb板固定到指定位置,然后控制伺服电机6的继电器闭合,通过气缸5将铝板2顶起,然后对pcb板进行加工,布线,清洗等功能。
33.作为本实用新型进一步的方案,所述铝板2表面镀了一层铁氟龙,所述铁氟龙用于防止表面粘油。
34.作为本实用新型进一步的方案,所述滚轮片采用的是磁力轮传动方式,相比于传统的齿轮传动,磁力轮传动属于非接触环境,无机械磨损,因此比以往的齿轮等传送工具使用寿命长,超低音,并且环境整洁干净。
35.本实用新型的工作原理是:在带动pcb板输送到左边限位处的时候,光电感应开关发出信号,电机对应的继电器断开,电机停止工作,同时伺服电机来控制后支撑杆1,气缸5 来控制前、左支撑杆1,将pcb板固定到指定位置,然后控制伺服电机6的继电器闭合,通过气缸5将铝板2顶起,然后对pcb板进行加工,布线,清洗等功能。
36.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下做出各种变化。
技术特征:
1.一种实现三个方向上限位的拍板机,其特征在于,包括铝板、输送组件、顶升组件、限位组件以及控制组件;所述输送组件用于带动pcb板输送至指定位置;所述顶升组件用于将铝板顶起进行加工;所述限位组件用于防止在顶升过程中发生位移;所述控制组件通过内部控制线路与输送组件、顶升组件以及限位组件连接。2.根据权利要求1所述的一种实现三个方向上限位的拍板机,其特征在于,所述输送组件包括输送支撑机构;所述输送支撑机构表面设置多组滚轮片,所述滚轮片用于带动pcb板输送至指定位置。3.根据权利要求1或2所述的一种实现三个方向上限位的拍板机,其特征在于,所述顶升组件包括线性轴承以及顶杆;所述顶杆与线性轴承连接并分布于设备四个角用于固定且顶升铝板的导向。4.根据权利要求3所述的一种实现三个方向上限位的拍板机,其特征在于,所述顶升组件还包括气缸,所述气缸固定安装在设备底部。5.根据权利要求4所述的一种实现三个方向上限位的拍板机,其特征在于,所述限位组件包括支撑杆以及限位板;所述支撑杆分布设置在设备前、后、左三个位置,所述设备的右端设置输送pvb板入口,所述限位板安装在铝板的上、下以及左侧位置。6.根据权利要求5所述的一种实现三个方向上限位的拍板机,其特征在于,所述控制组件包括光电感应开关;所述光电感应开关用于在带动pcb板输送到左边限位处的时候,光电感应开关发出信号,电机对应的继电器断开,电机停止工作,同时伺服电机来控制后支撑杆,气缸来控制前、左支撑杆,将pcb板固定到指定位置,控制所述伺服电机的继电器闭合,通过气缸将铝板顶起。7.根据权利要求6所述的一种实现三个方向上限位的拍板机,其特征在于,所述铝板表面镀了一层铁氟龙,所述铁氟龙用于防止表面粘油。8.根据权利要求2所述的一种实现三个方向上限位的拍板机,其特征在于,所述滚轮片采用的是磁力轮传动方式。
技术总结
本实用新型公开了一种实现三个方向上限位的拍板机,涉及自动化生产设备技术领域,包括铝板、输送组件、顶升组件、限位组件以及控制组件;所述输送组件用于带动PCB板输送至指定位置;所述顶升组件用于将铝板顶起进行加工;所述限位组件用于防止在顶升过程中发生位移,所述控制组件通过内部控制线路与输送组件、顶升组件以及限位组件连接,本专利解决了常规拍板机在拍板时出现的位移,不平稳,加工时受力不均匀,加工精度不高,移动速度需要缓慢等问题,通过支撑杆对PCB板在输送个方向上限位,即解决了位移,不平稳,加工受力不均匀等问题。加工受力不均匀等问题。加工受力不均匀等问题。
技术研发人员:王海二
受保护的技术使用者:深圳市欣汉生科技有限公司
技术研发日:2021.04.20
技术公布日:2021/12/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1