一种跳线帽夹爪机构的制作方法
1.本实用新型属于夹爪机构技术领域,具体涉及一种跳线帽夹爪机构。
背景技术:
2.跳线帽,是主板、硬盘等硬件上的小方形塑料帽,其内部是金属等导电材料,作用就是改变电路。但目前的跳线帽夹爪结构结构较为简单,夹取牢固度不高,跳线帽容易掉落,工作效率低,不能满足自动化生产需求。
技术实现要素:
3.为解决现有技术中存在的技术问题,本实用新型的目的在于提供一种跳线帽夹爪机构。
4.为实现上述目的,达到上述技术效果,本实用新型采用的技术方案为:
5.一种跳线帽夹爪机构,包括驱动机构、第一固定座、第二固定座、第一夹爪座和第二夹爪座,所述驱动机构底部对称设置第一固定座和第二固定座,第一固定座和第二固定座相对而立并分别与驱动机构连接,第一固定座上固定第一夹爪座,第二固定座上固定第二夹爪座,第一夹爪座和第二夹爪座相对而立,第一夹爪座底部和第二夹爪座底部分别开设第一夹槽和第二夹槽,通过驱动机构控制第一固定座和第二固定座运动并带动第一夹爪座和第二夹爪座相向或背向运动,第一夹爪座和第二夹爪座相向运动并通过第一夹槽和第二夹槽面面相对围成的空间夹紧跳线帽,第一夹槽和第二夹槽分别夹紧跳线帽的对角。
6.进一步的,所述第一夹槽和第二夹槽相对的面分别设置摩擦层。
7.进一步的,所述摩擦层的厚度为10-30微米。
8.进一步的,所述第一夹爪座和第二夹爪座截面分别呈l型。
9.进一步的,所述第一夹槽包括第一连接部、第二连接部及用于连接第一连接部和第二连接部的第一圆弧过渡部,所述第二连接部呈中空的方形结构。
10.进一步的,所述第二夹槽包括第三连接部、第四连接部及用于连接第三连接部和第四连接部的第二圆弧过渡部,所述第四连接部呈中空的方形结构。
11.与现有技术相比,本实用新型的有益效果为:
12.本实用新型公开了一种跳线帽夹爪机构,包括驱动机构、第一固定座、第二固定座、第一夹爪座和第二夹爪座,驱动机构底部对称设置第一固定座和第二固定座,第一固定座和第二固定座相对而立并分别与驱动机构连接,第一固定座上固定第一夹爪座,第二固定座上固定第二夹爪座,第一夹爪座和第二夹爪座相对而立,第一夹爪座底部和第二夹爪座底部分别开设第一夹槽和第二夹槽,通过驱动机构控制第一固定座和第二固定座运动并带动第一夹爪座和第二夹爪座相向或背向运动,第一夹爪座和第二夹爪座相向运动并通过第一夹槽和第二夹槽面面相对围成的空间夹紧跳线帽,第一夹槽和第二夹槽分别夹紧跳线帽的对角。本实用新型提供的跳线帽夹爪机构,能够夹紧跳线帽不掉落,沿跳线帽对角线夹紧,不会损伤跳线帽,整体结构紧凑,成本低廉,使用寿命长,刚性足够,更易满足自动化生
产需求,适应时代发展。
附图说明
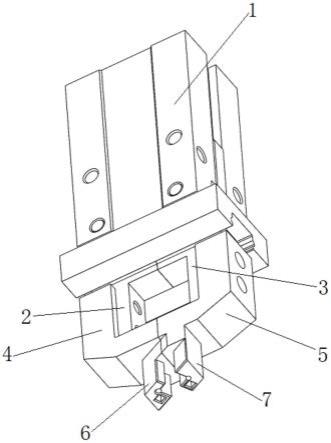
13.图1-2分别为本实用新型的立体结构示意图;
14.图3为本实用新型的工作状态图。
具体实施方式
15.下面结合附图对本实用新型进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
16.以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
17.如图1-3所示,一种跳线帽夹爪机构,包括驱动机构1、第一固定座2、第二固定座3、第一夹爪座4和第二夹爪座5,驱动机构1底部对称设置第一固定座2和第二固定座3,第一固定座2和第二固定座3相对而立并分别与驱动机构1连接,第一固定座2上固定第一夹爪座4,第二固定座3上固定第二夹爪座5,第一夹爪座4和第二夹爪座5相对而立,第一夹爪座4底部和第二夹爪座5底部分别开设第一夹槽6和第二夹槽7,通过驱动机构1控制第一固定座2和第二固定座3运动并带动第一夹爪座4和第二夹爪座5相向或背向运动,第一夹爪座4和第二夹爪座5相向运动并通过第一夹槽6和第二夹槽7面面相对围成的空间夹紧跳线帽10,第一夹槽6和第二夹槽7分别夹紧跳线帽10的对角。
18.第一夹槽6和第二夹槽7相对的面分别设置摩擦层,摩擦层的厚度为10-30微米,摩擦层表面呈波浪型或凹凸不平,有助于进一步提高夹紧度。
19.第一固定座2和第二固定座3截面分别呈倒l型,第一夹爪座4和第二夹爪座5截面分别呈l型,第一固定座2与第一夹爪座4相适配,第二固定座3与第二夹爪座5相适配。
20.更具体的,第一夹爪座4包括竖直放置的长边和横向放置的短边,短边的底部设置第一夹槽6,第二夹爪座5包括竖直放置的长边和横向放置的短边,短边的底部设置第二夹槽7。
21.第一夹槽6包括第一连接部61、第二连接部62及用于连接第一连接部61和第二连接部62的第一圆弧过渡部63,第二连接部62呈中空的方形结构。
22.第二夹槽7包括第三连接部71、第四连接部72及用于连接第三连接部71和第四连接部72的第二圆弧过渡部73,第四连接部72呈中空的方形结构。
23.通过第一圆弧过渡部63和第二圆弧过渡部73形成避位区域。
24.驱动机构1一侧由上至下依次设置第一气管接头11和第二气管接头12,第一气管接头11和第二气管接头12之间具有高度差,外部气体通过第一气管接头11和第二气管接头12为驱动机构1提供气源,驱动机构1优选气缸。
25.本实用新型未具体描述的部分或结构采用现有技术或现有产品即可,在此不做赘述。
26.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是
利用本实用新型说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
技术特征:
1.一种跳线帽夹爪机构,其特征在于,包括驱动机构、第一固定座、第二固定座、第一夹爪座和第二夹爪座,所述驱动机构底部对称设置第一固定座和第二固定座,第一固定座和第二固定座相对而立并分别与驱动机构连接,第一固定座上固定第一夹爪座,第二固定座上固定第二夹爪座,第一夹爪座和第二夹爪座相对而立,第一夹爪座底部和第二夹爪座底部分别开设第一夹槽和第二夹槽,通过驱动机构控制第一固定座和第二固定座运动并带动第一夹爪座和第二夹爪座相向或背向运动,第一夹爪座和第二夹爪座相向运动并通过第一夹槽和第二夹槽面面相对围成的空间夹紧跳线帽,第一夹槽和第二夹槽分别夹紧跳线帽的对角。2.根据权利要求1所述的一种跳线帽夹爪机构,其特征在于,所述第一夹槽和第二夹槽相对的面分别设置摩擦层。3.根据权利要求2所述的一种跳线帽夹爪机构,其特征在于,所述摩擦层的厚度为10-30微米。4.根据权利要求1所述的一种跳线帽夹爪机构,其特征在于,所述第一夹爪座和第二夹爪座截面分别呈l型。5.根据权利要求1所述的一种跳线帽夹爪机构,其特征在于,所述第一夹槽包括第一连接部、第二连接部及用于连接第一连接部和第二连接部的第一圆弧过渡部,所述第二连接部呈中空的方形结构。6.根据权利要求1所述的一种跳线帽夹爪机构,其特征在于,所述第二夹槽包括第三连接部、第四连接部及用于连接第三连接部和第四连接部的第二圆弧过渡部,所述第四连接部呈中空的方形结构。
技术总结
本实用新型公开了一种跳线帽夹爪机构,包括驱动机构、第一固定座、第二固定座、第一夹爪座和第二夹爪座,驱动机构底部设第一固定座和第二固定座,第一固定座和第二固定座相对而立并分别与驱动机构连接,第一固定座上固定第一夹爪座,第二固定座上固定第二夹爪座,第一夹爪座和第二夹爪座相对而立,第一夹爪座底部和第二夹爪座底部分别开设第一夹槽和第二夹槽,第一夹爪座和第二夹爪座相向运动并通过第一夹槽和第二夹槽面面相对围成的空间夹紧跳线帽,第一夹槽和第二夹槽分别夹紧跳线帽的对角。本实用新型能沿跳线帽对角线夹紧跳线帽不掉落,不会损伤跳线帽,结构紧凑,成本低廉,使用寿命长,刚性足够,更易满足自动化生产需求,适应时代发展。适应时代发展。适应时代发展。
技术研发人员:翟金双 付豪
受保护的技术使用者:苏州威兹泰克自动化科技有限公司
技术研发日:2021.11.26
技术公布日:2022/6/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1