一种深基坑作业一体化智能机的制作方法
1.本实用新型涉及电力深基坑作业技术领域,具体涉及一种深基坑作业一体化智能机。
背景技术:
2.深基坑是指开挖深度超过5米(含5米),或深度虽未超过5米,但地质条件和周围环境及地下管线特别复杂的工程,基坑工程主要包括基坑支护体系设计与施工和土方开挖,是一项综合性很强的系统工程。它要求岩土工程和结构工程技术人员密切配合,基坑工程是由地面向下开挖一个地下空间,深基坑四周一般设置垂直的挡土围护结构,围护结构一般是在开挖面基底下有一定插入深度的板(桩)墙结构;板(桩)墙有悬臂式、单撑式、多撑式。
3.现有的深基坑作业用的一体化智能机使用时,一般都是裸露在外的,智能机跌落在地面,容易造成智能机损坏。因此,本领域技术人员提供了一种深基坑作业一体化智能机,以解决上述背景技术中提出的问题。
技术实现要素:
4.为解决上述技术问题,本实用新型提供一种深基坑作业一体化智能机,包括外箱体和智能机本体,所述外箱体的前端设有箱门,外箱体底端固定连接底部箱体,外箱体内部四边处设有夹板,夹板固定连接伸缩杆,伸缩杆的另一端固定连接外箱体,伸缩杆外侧套装有减震弹簧。
5.优选的:所述底部箱体下端设有开口,底部箱体内侧设有支撑结构,底部箱体内部对称设有四个支撑腿。
6.优选的:所述支撑腿远离支撑结构的一端通过活动座铰接底部箱体,且支撑腿靠近活动座处开设有插孔。
7.优选的:所述底部箱体的四角处安装有滑动连接的插杆,插杆靠近活动座的一端固定连接有限位块,插杆位于底部箱体和限位块之间处套装有弹簧。
8.优选的:所述支撑结构包括支撑板,支撑板底端安装有把手。
9.优选的:所述支撑板上端固定连接活动杆,活动杆上端套装有活动套。
10.优选的:所述活动杆转动连接活动套,活动套固定连接底部箱体内壁。
11.本实用新型的技术效果和优点:
12.1、本实用新型中,利用外箱体对智能机本体起到保护的作用,夹板、伸缩杆和减震弹簧设置在智能机本体的外侧,能起到减震的作用。
13.2、本实用新型中,转动把手带动支撑板转动90
°
,使得支撑板与支撑腿分离,向外拉动活动杆,弹簧被限位块挤压,支撑腿向外侧转动90
°
,松开活动杆,在弹簧的作用下,活动杆插入插孔中,将支撑腿固定,利用支撑腿起到支撑的作用,便于工作人员操作智能机本体。
附图说明
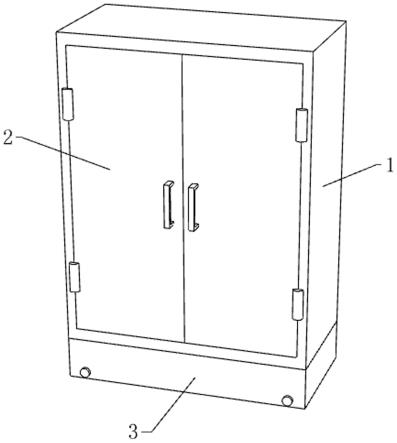
14.图1是本申请实施例提供的深基坑作业一体化智能机结构示意图;
15.图2是本申请实施例提供的深基坑作业一体化智能机中外箱体的结构示意图;
16.图3是本申请实施例提供的深基坑作业一体化智能机中底部箱体的结构示意图;
17.图4是本申请实施例提供的深基坑作业一体化智能机中底部箱体的使用状态的结构示意图;
18.图5是本申请实施例提供的深基坑作业一体化智能机中支撑结构的结构示意图;
19.图中:1、外箱体,2、箱门,3、底部箱体,4、智能机本体,5、夹板,6、伸缩杆,7、减震弹簧,8、支撑结构,801、把手,802、支撑板,803、活动杆,804、活动套,9、支撑腿,901、插孔,10、活动座,11、插杆,12、限位块,13、弹簧。
具体实施方式
20.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
21.请参阅图1~2,在本实施例中提供一种深基坑作业一体化智能机,包括外箱体1和智能机本体4,外箱体1的前端设有箱门2,外箱体1底端固定连接底部箱体3,外箱体1内部四边处设有夹板5,夹板5固定连接伸缩杆6,伸缩杆6的另一端固定连接外箱体1,伸缩杆6外侧套装有减震弹簧7。
22.请参阅图3~4,底部箱体3下端设有开口,底部箱体3内侧设有支撑结构8,底部箱体3内部对称设有四个支撑腿9,支撑腿9远离支撑结构8的一端通过活动座10铰接底部箱体3,且支撑腿9靠近活动座10处开设有插孔901,底部箱体3的四角处安装有滑动连接的插杆11,插杆11靠近活动座10的一端固定连接有限位块12,插杆11位于底部箱体3和限位块12之间处套装有弹簧13。
23.请参阅图3和5,支撑结构8包括支撑板802,支撑板802底端安装有把手801,支撑板802上端固定连接活动杆803,活动杆803上端套装有活动套804,且活动杆803转动连接活动套804,活动套804固定连接底部箱体3内壁。
24.本实用新型的工作原理是:
25.使用时,打开箱门2,露出智能机本体4,利用外箱体1对智能机本体4起到保护的作用,夹板5、伸缩杆6和减震弹簧7设置在智能机本体4的外侧,能起到减震的作用,防止外箱体1摔落,导致智能机本体4损坏,转动把手801带动支撑板802转动90
°
,使得支撑板802与支撑腿9分离,向外拉动活动杆803,弹簧13被限位块12挤压,支撑腿9向外侧转动90
°
,松开活动杆803,在弹簧13的作用下,活动杆803插入插孔901中,将支撑腿9固定,利用支撑腿9起到支撑的作用,便于工作人员操作智能机本体4。
26.显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本实用新型保护的范围。本实用新型中未具体
描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
技术特征:
1.一种深基坑作业一体化智能机,包括外箱体(1)和智能机本体(4),其特征在于,所述外箱体(1)的前端设有箱门(2),外箱体(1)底端固定连接底部箱体(3),外箱体(1)内部四边处设有夹板(5),夹板(5)固定连接伸缩杆(6),伸缩杆(6)的另一端固定连接外箱体(1),伸缩杆(6)外侧套装有减震弹簧(7)。2.根据权利要求1所述的一种深基坑作业一体化智能机,其特征在于,所述底部箱体(3)下端设有开口,底部箱体(3)内侧设有支撑结构(8),底部箱体(3)内部对称设有四个支撑腿(9)。3.根据权利要求2所述的一种深基坑作业一体化智能机,其特征在于,所述支撑腿(9)远离支撑结构(8)的一端通过活动座(10)铰接底部箱体(3),且支撑腿(9)靠近活动座(10)处开设有插孔(901)。4.根据权利要求1所述的一种深基坑作业一体化智能机,其特征在于,所述底部箱体(3)的四角处安装有滑动连接的插杆(11),插杆(11)靠近活动座(10)的一端固定连接有限位块(12),插杆(11)位于底部箱体(3)和限位块(12)之间处套装有弹簧(13)。5.根据权利要求2所述的一种深基坑作业一体化智能机,其特征在于,所述支撑结构(8)包括支撑板(802),支撑板(802)底端安装有把手(801)。6.根据权利要求5所述的一种深基坑作业一体化智能机,其特征在于,所述支撑板(802)上端固定连接活动杆(803),活动杆(803)上端套装有活动套(804)。7.根据权利要求6所述的一种深基坑作业一体化智能机,其特征在于,所述活动杆(803)转动连接活动套(804),活动套(804)固定连接底部箱体(3)内壁。
技术总结
本实用新型公开了一种深基坑作业一体化智能机,包括外箱体和智能机本体,所述外箱体的前端设有箱门,外箱体底端固定连接底部箱体,外箱体内部四边处设有夹板,夹板固定连接伸缩杆,伸缩杆的另一端固定连接外箱体,伸缩杆外侧套装有减震弹簧,本实用新型中,利用外箱体对智能机本体起到保护的作用,夹板、伸缩杆和减震弹簧设置在智能机本体的外侧,能起到减震的作用,转动把手带动支撑板转动90
技术研发人员:李建
受保护的技术使用者:广东润彩建筑工程有限公司
技术研发日:2022.04.18
技术公布日:2022/8/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1