智能机器人
本技术一般涉及机器人,具体涉及智能机器人。
背景技术:
1、智能机器人用于向用户提供智能服务,目前在商业服务、医疗服务等行业中的应用越来越广泛。现有智能机器人包括机头部、机身部和机座部,机身部具有机身壳体,机座部具有机座壳体,机身壳体和机座壳体之间通过卡勾进行卡接,使得两者之间快速且稳固地装配。基于智能机器人的美观程度等因素的考虑,卡勾设置于机壳内以实现对卡勾的隐藏。但是,上述隐藏式的卡勾设置,会导致机身壳体和机座壳体之间的拆卸作业难度大,增加了智能机器人的维修难度。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种智能机器人。
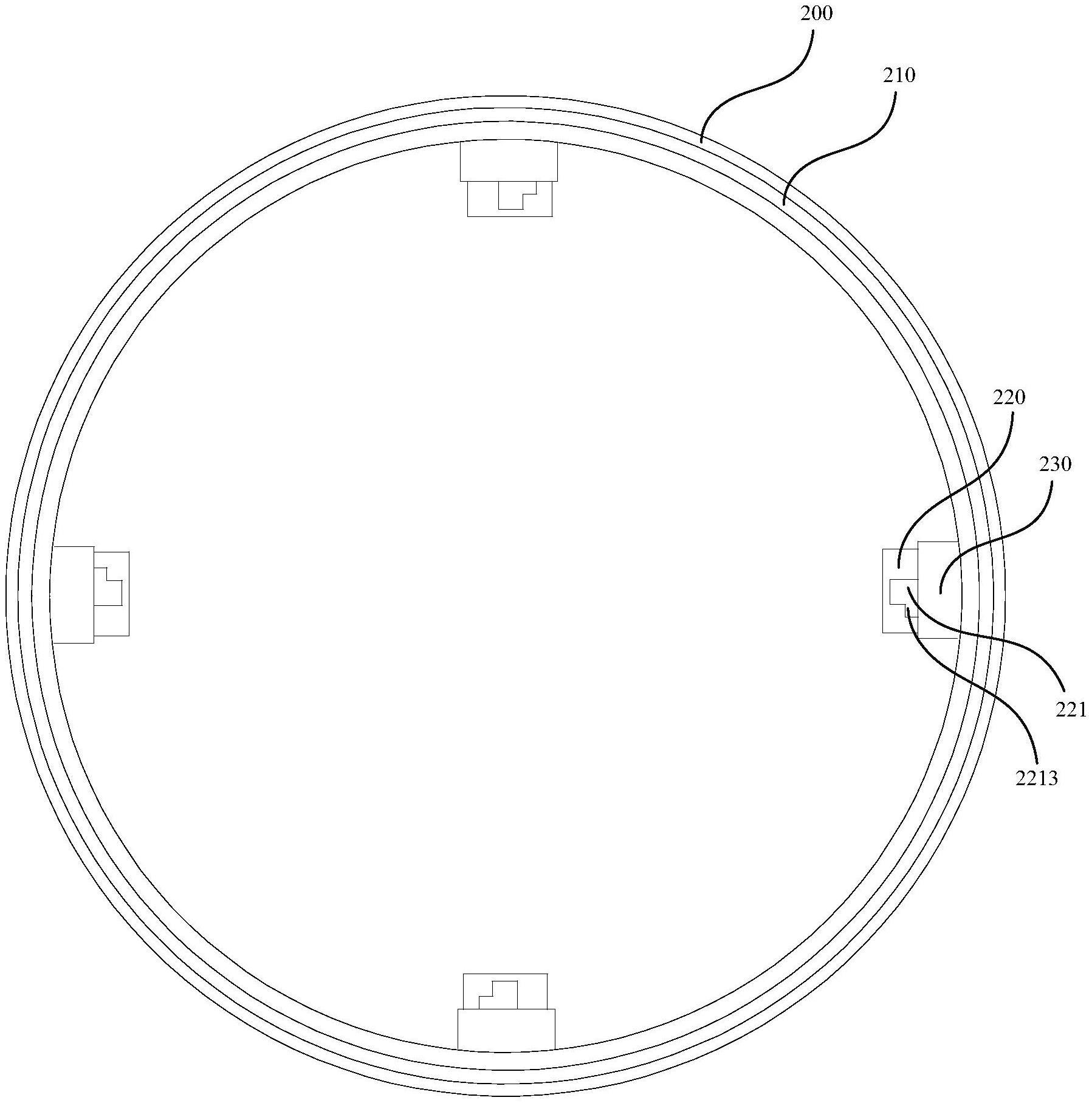
2、本申请提供一种智能机器人,包括机壳,机壳包括:
3、机身壳体,机身壳体的底部设有沿周向间隔设置的多个卡勾;
4、底座壳体,底座壳体的内腔壁设有沿周向间隔排布的多个活动件,所多个活动件与卡勾一一对应设置,活动件沿靠近或远离底座壳体的内腔壁的方向可移动地设置以在卡接位置和避让位置之间移动,在卡接位置时,对应的卡勾和活动件之间卡接配合,在避让位置时,卡勾和活动件之间的卡接配合解除,其中机壳设有与多个活动件一一对应的多个通孔,且活动件位于对应的通孔的一侧。
5、进一步地,活动件的顶面凹设有容置槽,容置槽具有第一槽壁,第一槽壁凹设有卡槽部和避让缺口部,避让缺口部位于卡槽部靠近底座壳体的内腔壁的一侧,避让缺口部的一端与卡槽部连通且另一端贯穿至活动件的顶面,在卡接位置时,卡勾和卡槽部卡接配合,在避让位置时,卡勾位于避让缺口部内。
6、进一步地,卡槽部具有与卡勾卡接配合的第一卡接槽壁,第一卡接槽壁靠近避让缺口部的一端设置有增阻结构。
7、进一步地,增阻结构包括若干凸点。
8、进一步地,凸点的外表面为圆弧面。
9、进一步地,底座壳体的内腔壁凸设有多个安装座,多个安装座与多个活动件一一对应设置,安装座远离底座壳体的内腔壁的一端设有导向腔,活动件的部分位于导向腔内且与导向腔导向配合。
10、进一步地,活动件和导向腔之间设有止脱结构。
11、进一步地,止脱结构包括止脱槽和止脱凸起,止脱槽和止脱凸起分别设置于活动件和导向腔的腔壁,止脱槽沿导向腔的导向方向延伸设置,止脱凸起插设于止脱槽内,在避让位置时,止脱凸起与止脱槽的槽壁止挡配合以限制活动件脱离导向腔。
12、进一步地,底座壳体的顶部设置有环状的插接凸起,机身壳体的底部设有环状的插接槽,插接凸起插设于插接凸起,通孔位于底座壳体。
13、本申请提供的智能机器人,工作人员能够通过顶杆穿过通孔推动活动件移动以将活动件由卡接配合切换至避让位置以解除卡勾和活动件之间的卡接配合,在隐藏卡勾的同时还使得机身壳体和底座壳体之间能够快拆,降低了智能机器人的维修难度。
技术特征:
1.一种智能机器人,包括机壳,其特征在于,所述机壳包括:
2.根据权利要求1所述的智能机器人,其特征在于,所述活动件的顶面凹设有容置槽,所述容置槽具有第一槽壁,所述第一槽壁凹设有卡槽部和避让缺口部,所述避让缺口部位于所述卡槽部靠近所述底座壳体的内腔壁的一侧,所述避让缺口部的一端与所述卡槽部连通且另一端贯穿至所述活动件的顶面,在所述卡接位置时,所述卡勾和所述卡槽部卡接配合,在所述避让位置时,所述卡勾位于所述避让缺口部内。
3.根据权利要求2所述的智能机器人,其特征在于,所述卡槽部具有与所述卡勾卡接配合的第一卡接槽壁,所述第一卡接槽壁靠近所述避让缺口部的一端设置有增阻结构。
4.根据权利要求3所述的智能机器人,其特征在于,所述增阻结构包括若干凸点。
5.根据权利要求4所述的智能机器人,其特征在于,所述凸点的外表面为圆弧面。
6.根据权利要求1所述的智能机器人,其特征在于,所述底座壳体的内腔壁凸设有多个安装座,所述多个安装座与所述多个活动件一一对应设置,所述安装座远离所述底座壳体的内腔壁的一端设有导向腔,所述活动件的部分位于所述导向腔内且与所述导向腔导向配合。
7.根据权利要求6所述的智能机器人,其特征在于,所述活动件和所述导向腔之间设有止脱结构。
8.根据权利要求7所述的智能机器人,其特征在于,所述止脱结构包括止脱槽和止脱凸起,所述止脱槽和所述止脱凸起分别设置于所述活动件和所述导向腔的腔壁,所述止脱槽沿所述导向腔的导向方向延伸设置,所述止脱凸起插设于所述止脱槽内,在所述避让位置时,所述止脱凸起与所述止脱槽的槽壁止挡配合以限制所述活动件脱离所述导向腔。
9.根据权利要求1所述的智能机器人,其特征在于,所述底座壳体的顶部设置有环状的插接凸起,所述机身壳体的底部设有环状的插接槽,所述插接凸起插设于所述插接凸起,所述通孔位于所述底座壳体。
技术总结
本申请公开了一种智能机器人,包括机壳,机壳包括:机身壳体,机身壳体的底部设有沿周向间隔设置的多个卡勾;底座壳体,底座壳体的内腔壁设有沿周向间隔排布的多个活动件,所多个活动件与卡勾一一对应设置,活动件沿靠近或远离底座壳体的内腔壁的方向可移动地设置以在卡接位置和避让位置之间移动,在卡接位置时,对应的卡勾和活动件之间卡接配合,在避让位置时,卡勾和活动件之间的卡接配合解除,其中机壳设有与多个活动件一一对应的多个通孔,且活动件位于对应的通孔的一侧。本申请提供的智能机器人,在隐藏卡勾的同时还使得机身壳体和底座壳体之间能够快拆,降低了智能机器人的维修难度。
技术研发人员:陈晗阳
受保护的技术使用者:江苏财会职业学院
技术研发日:20220811
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!