一种新型工业机器人智能控制器的制作方法
本技术涉及工业生产,尤其涉及一种新型工业机器人智能控制器。
背景技术:
1、工业机器人广泛使用在产业制造上,汽车制造、电器、食品等,能替代反复机器式操纵工作,主要依靠本身动力和控制来实现种种功能的一种机器。它能够服从人类指挥,也能够按照事先编好的程序进行运转,自从20世纪人们创造了第一台工业机器人以后,机器人就显示出了它极大的生命力,在短短五十多年的时间中,机器人技术得到了迅速的发展。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种新型工业机器人智能控制器,对比现有的智能控制器,该智能控制器通过设置的安装板,在需要将控制手柄进行携带时,通过按动拉板,将卡块对准卡槽并插入,然后松开拉板,在弹簧的作用下使卡块与卡槽进行卡紧,然后将佩戴手环套在工作人员的手柄上,避免了当需要将控制手柄进行携带时不方便携带的问题。
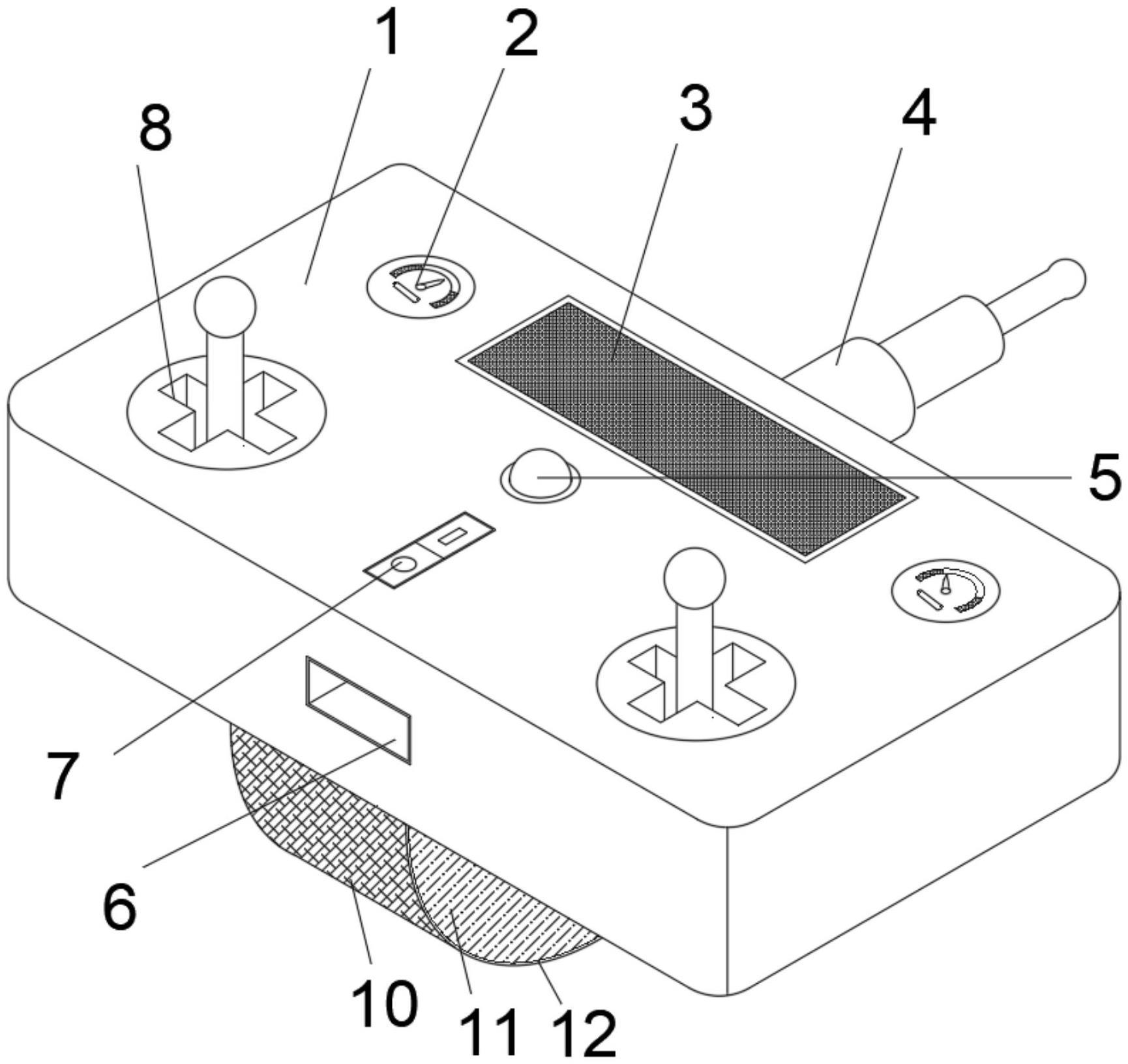
2、为实现上述目的,本实用新型提供了如下技术方案:包括控制手柄,所述控制手柄前端外壁的中部固定连接有天线,所述控制手柄上表面前端的两侧均设置有显示仪表,所述控制手柄上表面前端的中部设置有显示屏,所述控制手柄上表面后端的两侧均设置有两个控制摇杆,所述控制手柄上表面后端的中部设置有总开关,所述控制手柄上表面的中心处设置有指示灯,所述控制手柄的后端外壁设置有充电接口;
3、所述控制手柄内部的一侧固定连接有半导体制冷片,所述半导体制冷片的一侧外壁固定连接有风扇,所述控制手柄内底面靠近风扇的一侧固定连接有温度传感器,所述控制手柄内底面的中心处固定连接有蓄电池,所述控制手柄内底面远离温度传感器的一侧设置有控制模块本体;
4、所述控制手柄下表面的前端和后端均开设有两个卡槽,所述控制手柄的下端设置有佩戴手环,所述佩戴手环上表面的前端和后端均固定连接有安装板,所述安装板上表面的两侧均开设有安装槽,所述安装槽的内部均设置有滑杆,所述滑杆杆身靠近安装板中部的一侧均套设有弹簧,所述弹簧远离安装板中部的一侧外壁均固定连接有卡块,所述卡块远离安装板中部的一侧外壁固定连接有活动板,所述活动板的靠近安装板中部的一侧开设有活动腔,所述活动板远离安装板中部的一侧外壁均固定连接有拉板。
5、通过上述技术方案,对比现有的控制器,该控制器通过设置的半导体制冷片可有效地将控制手柄内部的温度进行下降,再通过设置的安装板,使需要将控制手柄进行携带时,可通过将安装板的卡块插入卡槽内,以此使佩戴手环与控制手柄进行固定连接,以此使该控制手柄更便于进行携带。
6、进一步地,所述卡块均与卡槽卡接配合;
7、通过上述技术方案,通过卡块均与卡槽卡接配合可更好地将佩戴手环进行安装。
8、进一步地,所述佩戴手环的上表面设置有吸汗棉;
9、通过上述技术方案,通过佩戴手环的上表面设置有吸汗棉可有效地提升佩戴手环的舒适感。
10、进一步地,所述佩戴手环的下表面设置有耐脏层;
11、通过上述技术方案,通过佩戴手环的下表面设置有耐脏层可有效地提升佩戴手环的洁净度。
12、进一步地,所述活动腔均与滑杆紧密贴合并滑动连接;
13、通过上述技术方案,通过活动腔均与滑杆紧密贴合并滑动连接可更好地控制卡块进行移动。
14、进一步地,所述控制手柄的一侧外壁开设有多个透气孔;
15、通过上述技术方案,通过控制手柄的一侧外壁开设有多个透气孔可更好地将风扇的风力排出。
16、进一步地,所述佩戴手环为松紧尼龙材质;
17、通过上述技术方案,通过佩戴手环为松紧尼龙材质可更好地适应不同工作人员的手臂粗度。
18、进一步地,所述蓄电池均与指示灯、控制模块本体、半导体制冷片、风扇和温度传感器电性连接;
19、通过上述技术方案,通过蓄电池均与指示灯、控制模块本体、半导体制冷片、风扇和温度传感器电性连接使蓄电池可更好地为指示灯、控制模块本体、半导体制冷片、风扇和温度传感器提供电力。
20、本实用新型具有如下有益效果:
21、1、本实用新型提出的一种新型工业机器人智能控制器,对比现有的智能控制器,该智能控制器通过设置的温度传感器,当温度传感器检测到控制手柄内部的温度较高时,启动半导体制冷片和风扇,以此对控制手柄内部的温度进行降低,避免了以往控制器因内部元件工作时散发的热量温度较高,可能导致内部线束提前老化,从而造成降低控制器使用寿命的问题。
22、2、本实用新型提出的一种新型工业机器人智能控制器,对比现有的控制器,该控制器通过设置的半导体制冷片可有效地将控制手柄内部的温度进行下降,再通过设置的安装板,使需要将控制手柄进行携带时,可通过将安装板的卡块插入卡槽内,以此使佩戴手环与控制手柄进行固定连接,以此使该控制手柄更便于进行携带。
23、3、本实用新型提出的一种新型工业机器人智能控制器,对比现有的智能控制器,该智能控制器通过设置的安装板,在需要将控制手柄进行携带时,通过按动拉板,将卡块对准卡槽并插入,然后松开拉板,在弹簧的作用下使卡块与卡槽进行卡紧,然后将佩戴手环套在工作人员的手柄上,避免了当需要将控制手柄进行携带时不方便携带的问题。
技术特征:
1.一种新型工业机器人智能控制器,包括控制手柄(1),其特征在于:所述控制手柄(1)前端外壁的中部固定连接有天线(4),所述控制手柄(1)上表面前端的两侧均设置有显示仪表(2),所述控制手柄(1)上表面前端的中部设置有显示屏(3),所述控制手柄(1)上表面后端的两侧均设置有两个控制摇杆(8),所述控制手柄(1)上表面后端的中部设置有总开关(7),所述控制手柄(1)上表面的中心处设置有指示灯(5),所述控制手柄(1)的后端外壁设置有充电接口(6);
2.根据权利要求1所述的一种新型工业机器人智能控制器,其特征在于:所述卡块(24)均与卡槽(9)卡接配合。
3.根据权利要求1所述的一种新型工业机器人智能控制器,其特征在于:所述佩戴手环(12)的上表面设置有吸汗棉(10)。
4.根据权利要求1所述的一种新型工业机器人智能控制器,其特征在于:所述佩戴手环(12)的下表面设置有耐脏层(11)。
5.根据权利要求3所述的一种新型工业机器人智能控制器,其特征在于:所述活动腔(26)均与滑杆(23)紧密贴合并滑动连接。
6.根据权利要求1所述的一种新型工业机器人智能控制器,其特征在于:所述控制手柄(1)的一侧外壁开设有多个透气孔(13)。
7.根据权利要求3所述的一种新型工业机器人智能控制器,其特征在于:所述佩戴手环(12)为松紧尼龙材质。
8.根据权利要求3所述的一种新型工业机器人智能控制器,其特征在于:所述蓄电池(25)均与指示灯(5)、控制模块本体(19)、半导体制冷片(15)、风扇(14)和温度传感器(16)电性连接。
技术总结
本技术涉及工业生产技术领域,公开了一种新型工业机器人智能控制器,包括控制手柄,所述控制手柄上表面一侧的前端和后端均固定连接有显示仪表,所述控制手柄上表面一侧的中部固定连接有显示屏,所述控制手柄上表面远离显示仪表的一侧均固定连接有两个控制摇杆,所述控制摇杆的底部均贯穿控制手柄至控制手柄的内部固定连接有控制板。本技术中,该智能控制器通过设置的温度传感器,当温度传感器检测到控制手柄内部的温度较高时,启动半导体制冷片和风扇,以此对控制手柄内部的温度进行降低,避免了以往控制器因内部元件工作时散发的热量温度较高,可能导致内部线束提前老化,从而造成降低控制器使用寿命的问题。
技术研发人员:李晶盛
受保护的技术使用者:湖南多贺电气有限公司
技术研发日:20221216
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!